 FPGA设计中两种IO约束:管脚约束,延迟约束
FPGA设计中两种IO约束:管脚约束,延迟约束
I/O约束
I/O约束是必须要用的约束,又包括管脚约束和延迟约束。
管脚约束
管脚约束就是指管脚分配,我们要指定管脚的PACKAGE_PIN和IOSTANDARD两个属性的值,前者指定了管脚的位置,后者指定了管脚对应的电平标准。
set_property -dict {PACKAGE_PIN AJ16 IOSTANDARD LVCMOS18} [get_ports "led[0]" ]
在Vivado规定,必须要指定管脚电平,不然在最后一步生成比特流时会出错。
除了管脚位置和电平,还有一个大家容易忽略但很容易引起错误的就是端接,当我们使用差分电平时比如LVDS,在在V6中我们使用IBUFDS来处理输入的差分信号时,可以指定端接为TRUE。
IBUFDS #(
.DIFF_TERM("TRUE"), // Differential Termination
.IOSTANDARD("DEFAULT") // Specify the input I/O standard
) IBUFDS_inst (
.O(O), // Buffer output
.I(I), // Diff_p buffer input (connect directly to top-level port)
.IB(IB) // Diff_n buffer input (connect directly to top-level port)
);
但在Ultrascale中的IBUFDS,却把端接这个选项去掉了
IBUFDS #(
.DQS_BIAS("FALSE") // (FALSE, TRUE)
)
IBUFDS_inst (
.O(O), // 1-bit output: Buffer output
.I(I), // 1-bit input: Diff_p buffer input (connect directly to top-level port)
.IB(IB) // 1-bit input: Diff_n buffer input (connect directly to top-level port)
);
我们必须要在xdc或I/O Pors界面中,手动指定,否则可能会出错。
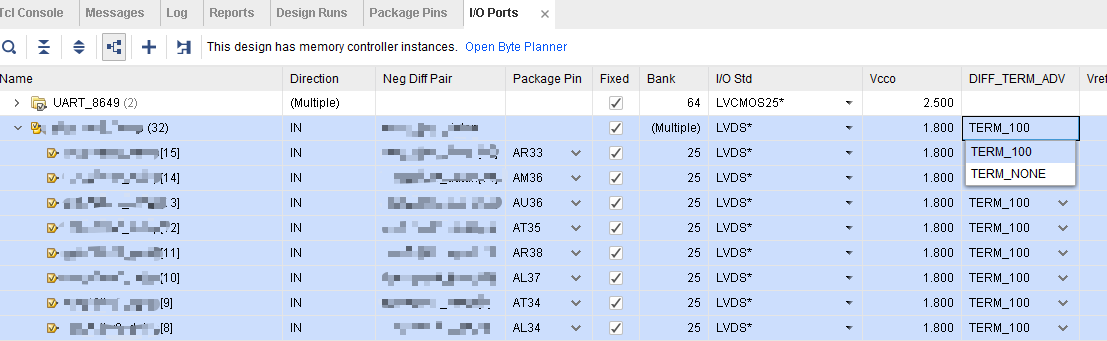
笔者之前就采过一个坑,差分端口输入,当连续输入的数据为11101111这种时,中间那个0拉不下来,还是1,同样也会发生在000010000,这样就导致数据传输错误,后来才发现是端接忘记加。因为端接会影响信号的实际电平,导致FPGA判断错误。
当综合完成后,我们可以点击DRC,进行设计规则检查,这一步可以报出一些关键问题,比如时钟端口未分配在时钟引脚上等。
延迟约束
延迟约束用的是set_input_delay和set_output_delay,分别用于input端和output端,其时钟源可以是时钟输入管脚,也可以是虚拟时钟。但需要注意的是,这个两个约束并不是起延迟的作用,具体原因下面分析。
set_input_delay
这个约束跟ISE中的OFFSET=IN功能相同,但设置方式不同。下图所示即为input delay的约束说明图。
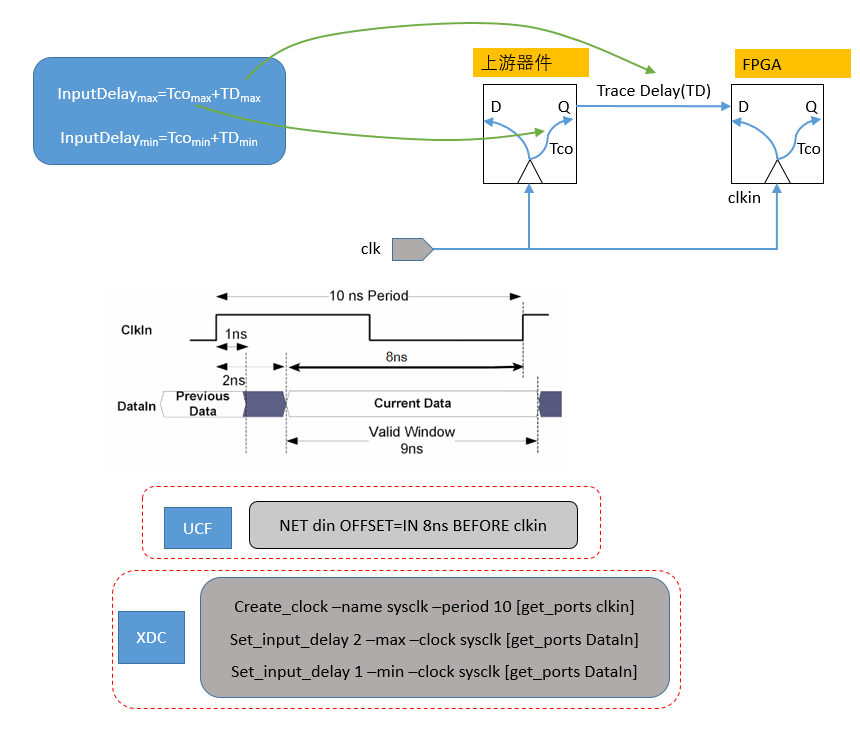
从图中很容易理解,
T_inputdelay = Tco + TD
当满足图中的时序时,最大延迟为2ns,最小延迟为1ns。
因此,需要加的时序约束为:
create_clock -name sysclk -period 10 [get_ports clkin] set_input_delay 2 -max -clock sysclk [get_ports Datain] set_input_delay 1 -min -clock sysclk [get_ports Datain] set_output_delay
set_output_delay的用法跟set_input_delay十分相似,这里就不再展开讲了。我们上面讲set_input_delay的描述中,大家可以看到,这个约束是告诉vivado我们的输入信号和输入时钟之间的延迟关系,跟下面要讲的时钟周期约束是一个原理,让vivado在这个前提下去Place and Route。并不是调节输入信号的延迟,因为身边有不少的FPGA工程师在没用过这个约束指令之前,都以为这是调节延迟的约束。
如果要调整输入信号的延迟,只能使用IDELAY,在V6中,IDELAY模块有32个tap值,每个tap可延迟78ps,这样总共差不多是2.5ns。
编辑:hfy
-
FPGA
+关注
关注
1625文章
21663浏览量
601672 -
DRC
+关注
关注
2文章
148浏览量
36120 -
Vivado
+关注
关注
19文章
807浏览量
66312
发布评论请先 登录
相关推荐
与非门构成的基本RS触发器的约束条件是什么
两种SR锁存器的约束条件
Xilinx FPGA编程技巧之常用时序约束详解
时序约束实操
Xilinx FPGA的约束设置基础
Xilinx FPGA编程技巧之常用时序约束详解
介绍一种新的可以约束光的纳米级领结结构
机器人运动学中的非完整约束与运动模型推导

FPGA物理约束之布局约束

Pod一直处于Pending状态?什么是Pod拓扑约束?

FPGA物理约束之布线约束

SV约束随机化总结






 工商网监
工商网监
评论