 探索柔性机器的弯曲和螺旋气动人工肌肉设计
探索柔性机器的弯曲和螺旋气动人工肌肉设计

柔性机器人具有良好的顺从性、高度的运动灵活性、优异的环境适应性,正逐步向医疗、教育、家庭、服务等与人类生活更加密切的全新领域拓展,在人类社会扮演着越来越重要的角色,为未来智能社会夯实基础。
哈尔滨工业大学近期在《Soft Robotics》杂志上发表了最新研究成果“Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk”,研制了一系列伸长型和收缩型的弯曲或螺旋气动人工肌肉(Pneumatic Artificial Muscles, PAM),作者通过建立数学模型和性能表征实验等方法,以具象的三维曲面簇的形式对轴向、弯曲和螺旋气动人工肌肉进行了系统的分析与研究,为研究和设计人员提供了一个可靠的设计参考图谱。
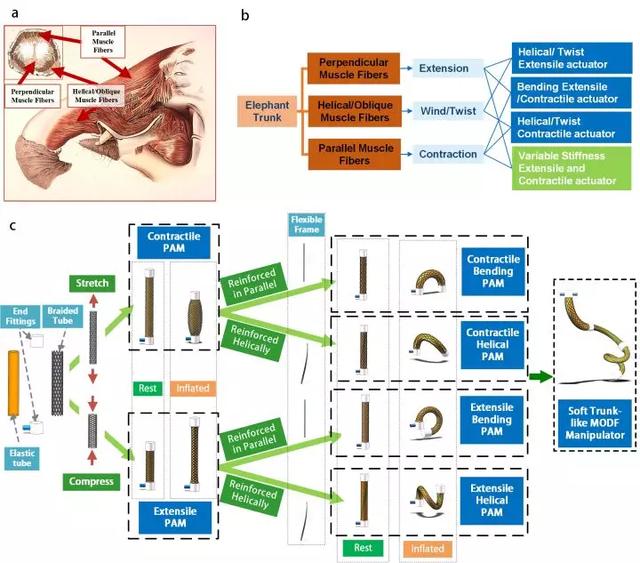
图1:象鼻肌肉纤维启发的弯曲与螺旋气动人工肌肉
作者通过一个仿象鼻的多自由度柔性臂来探索弯曲和螺旋气动人工肌肉在柔性机器人领域的潜在应用。收缩式气动人工具有很大的输出或负载能力,而伸长型气动人工肌肉可以产生更多的变形。所以研究者根据不同驱动器的输出特性,第一段使用收缩式弯曲气动人工肌肉以承受最大的载荷,第二部分利用伸长式弯曲气动人工肌肉提供更大的运动范围。同时,螺旋型气动人工肌肉被安装在末端,以模仿象鼻的动作抓住各种物体。整个柔性臂的总长度和最大直径分别为65.5 cm和2.5 cm,因此,柔性机械手的长度/直径比可达26.2,甚至比真正的象鼻还要大。
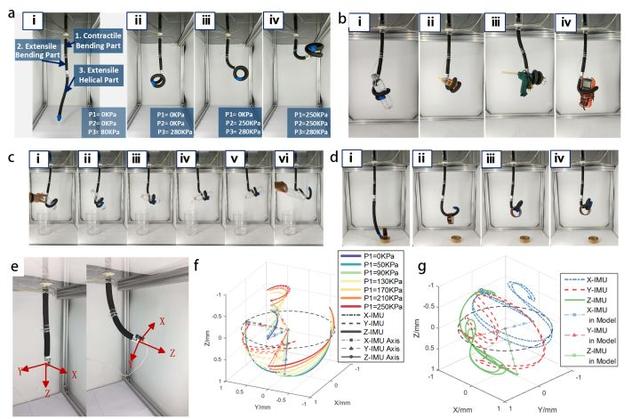
图2:仿生象鼻抓取物体和三维运动空间
哈尔滨工业大学冷劲松教授团队与美国马里兰大学Norman M. Wereley教授团队合作完成此项工作,论文通讯作者为冷劲松教授,第一作者为哈尔滨工业大学管清华博士,研制的轴向、弯曲和螺旋气动人工肌肉具有优异的适应性、灵活性和可设计性,可以被广泛地应用于运动辅助外骨骼、可穿戴设备、生物医疗机器人、柔性分类机器人、搜索机器人等。
-
可穿戴设备
+关注
关注
55文章
3899浏览量
170304 -
柔性机器人
+关注
关注
1文章
40浏览量
5052
发布评论请先 登录
技术资讯 I 柔性电路设计

揭秘:中山这家高新企业如何用“柔性电池”改变未来生活
破解柔性生产难题:知识驱动具身智能工业机器人的实战应用指南

功率放大器在螺旋载荷下管中弯曲模态导波中的应用
探索英飞凌XENSIV™ MEMS麦克风柔性评估套件
探索英飞凌XENSIV™ MEMS麦克风柔性评估套件
柔性天线技术原理及核心特性
探索RISC-V在机器人领域的潜力
CAD如何绘制螺旋线

JMC1200N柔性不可扭曲波导JUPITER
臂螺旋天线:为无人驾驶机器打造高精度导航新体验
光纤跳线可以弯曲吗
采用扇出晶圆级封装的柔性混合电子
JMC1200T柔性和可扭转波导JUPITER
纳芯微磁传感器技术推动人形机器人性能提升




评论