 linux中block驱动的编写详解
linux中block驱动的编写详解

引言
像IIC、LED、KEY等都属于字符设备,这些设备的驱动是所有驱动类型中最为简单的。块设备是另外一种不同于字符设备的类型,这两类设备在linux的驱动结构中有很大差异。总体来说,块设备驱动比字符设备驱动复杂的多,在IO操作上也表现出很大的不同。缓冲、IO的调度、请求队列等都是和块设备驱动相关的概念。
本章从驱动小白(指本人)的切身实际出发,先不去了解那些深奥的XXX,只从一个最简单的例子开始,对块设备驱动的结构有一个大体的了解。路漫漫其修远兮,驱动是一个大坑,够你用10年来填。慢慢学吧。
1. 块设备结构
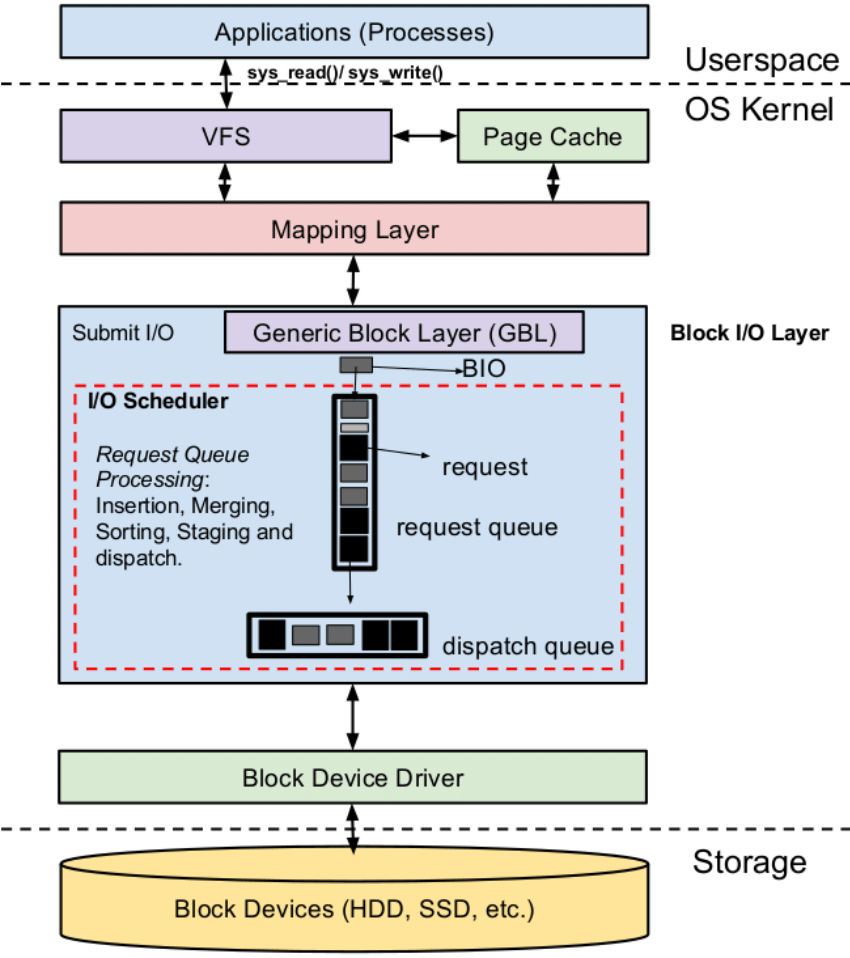
块设备就是指磁盘、CD-ROM等硬件存储介质,块设备驱动连接了块设备和用户空间,实现用户空间对磁盘的大块数据访问。整个子系统如下图所示,包含虚拟文件系统,块IO调度层,块设备驱动以及具体的块设备。块设备不同于字符设备,它是以块为单位接收输入和返回输出,而字符设备是以字节为单位。块设备支持随机访问,而且其读写速度都快于字符设备,因此驱动的表现也至关重要。这也是为什么块设备驱动的结构和字符设备的驱动结构被分开来写。块是最小的读写单位,不同的文件系统有不同大小的块尺寸,但是它必须是2的指数,同时不能超过页大小。通常使用的大小有512字节,1K字节,4K字节等。
虚拟文件系统(VFS):隐藏了各种硬件的具体细节,为用户操作不同的硬件提供了一个统一的接口。其基于不同的文件系统格式,比如EXT,FAT等。用户程序对设备的操作都通过VFS来完成,在VFS上面就是诸如open、close、write和read的函数API。
映射层(mapping layer):这一层主要用于确定文件系统的block size,然后计算所请求的数据包含多少个block。同时调用具体文件系统函数来访问文件的inode,确定所请求的数据在磁盘上面的逻辑地址。
IO调度器:这部分是linux块系统中非常关键的部分,其涉及到如何接收用户请求并能最高效去访问硬件磁盘中的数据。
Block driver:完成和块设备的具体交互。
2. 驱动程序详解
通过编写一个vmem_disk驱动来了解block驱动的结构,vmem_disk是一种模拟磁盘,其数据实际上存储在RAM中。它通过vmalloc()分配出来的内存空间来模拟出一个磁盘,以块设备方式来访问这片内存。现在来看其主要结构。
2.1 block_device_operations
Block_device_operations类似于字符设备驱动中的file_operations结构,它是对块设备各种操作的集合,定义代码如下:
struct block_device_operations {
int (*open) (struct block_device *, fmode_t);
int (*release) (struct gendisk *, fmode_t);
int (*locked_ioctl) (struct block_device *, fmode_t, unsigned, unsigned long);
int (*ioctl) (struct block_device *, fmode_t, unsigned, unsigned long);
int (*compat_ioctl) (struct block_device *, fmode_t, unsigned, unsigned long);
int (*direct_access) (struct block_device *, sector_t,void **, unsigned long *);
int (*media_changed) (struct gendisk *);
int (*revalidate_disk) (struct gendisk *);
int (*getgeo)(struct block_device *, struct hd_geometry *);
struct module *owner;
};
1) 打开和释放
int (*open)(struct inode *inode ,struct file *filp); int (*release)(struct inode *inode ,struct file *filp);
这个和字符设备驱动类似,当设备被打开和关闭时将调用它们。
2) IO控制
int (*ioctl)(struct inode *inode,struct file *filp uusignwd intcmd,unsigned long arg)
这个和字符设备驱动中的ioctrl类似,也是用于系统调用。块设备包含大量的标准请求,这些标准请求由linux通用块设备层处理,因此大部分ioctrl函数相当短。
3) 介质改变
int (*check_media_change) (kdev_t); int (*revalidate) (kdev_t);
像磁盘、CD-ROM等块设备是可插拔的,因此需要有个函数来检测设备是否存在。当介质发生改变,使用revalidate_disk来响应,给驱动一个机会进行必要的工作来使介质准备好。
4) 获得驱动信息
int (*getgeo)(struct block_device *,struct hd_geometry *);
该函数根据驱动器的几何信息填充一个hd_geometry结构体,hd_geometry包含磁头、扇区、柱面等信息。
所以我们要填充这个结构体信息,并定义其对应函数。填充如下:
static struct block_device_operations vmem_fops={
.owner=THIS_MODULE,
.getgeo=vmem_getgeo,
.ioctl=vmem_ioctl,
.open=vmem_open,
.release=vmem_release,
};
我们只定义了open、release、ioctrl、getgeo函数。为了简化这个驱动,我们把open、release、ioctrl函数的具体内容也都省略了,只是给出一个定义,没有任何有效内容。但是hd_geometry的信息需要填充,所以getgeo函数定义如下:
static int vmem_getgeo(struct block_device *bdev, struct hd_geometry *geo)
{
geo->cylinders=1;
geo->heads=1;
geo->sectors=BLK_SIZE/SECTOR_SIZE;
return 0;
}
定义了使用的块设备的柱面、磁头和扇区个数。
2.2 gendisk结构体
在linux内核中,用gendisk结构体来表示一个独立的磁盘设备。就像字符设备驱动中使用cdev结构体一样,它也包含主次设备号,需要分配内存,释放结构体和初始化操作。
1) 分配gendisk
分配函数为:
struct gendisk *alloc_disk(int minors);
2) 增加gendisk
这个是用于注册磁盘设备,函数为:
void add_disk(struct gendisk *gd);
3) 释放gendisk
当不再需要使用磁盘时候,需要释放这个结构体,也即释放其分配的内存。
void del_gendisk(struct gendisk *gd);
以上这些函数在快设备初始化和关闭驱动中调用。
2.3 请求处理
每个块设备驱动的核心是它的请求函数,实际的工作,至少如设备的启动,都是在这个函数里完成的。块设备驱动程序的request函数有以下原型:
void request(request_queue_t *queue);
当内核需要驱动程序处理读取、写入以及其它对设备的操作时,就会调用该函数。在其返回前,request函数不必完成所有队列中的请求。事实上,对大多数真实设备而言,它可能没有完成任何请求。
每个设备都有一个请求队列,这是因为对磁盘数据实际传入和传出发生的时间,与内核请求的时间相差很大,因此内核需要有一定灵活性,以安排在适当时刻(比如把影响相邻磁盘扇区的请求分成一组)进行传输。
我们用一个简单的request函数:
static void vmem_request(struct request_queue *q){
struct request *req;
uint64_t pos=0;
ssize_t size=0;
struct bio_vec bvec;
int rv=0;
struct req_iterator iter;
void *kaddr=NULL;
while((req=blk_fetch_request(q)) != NULL){
spin_unlock_irq(q->queue_lock);
pos=blk_rq_pos(req)*SECTOR_SIZE;
size=blk_rq_bytes(req);
if(pos+size>vdev->size){
printk(KERN_WARNING "beyond addr/n");
rv=-EIO;
goto skip;
}
rq_for_each_segment(bvec, req, iter){
kaddr=kmap(bvec.bv_page);
rv=vmem_transfer(vdev, pos, bvec.bv_len, kaddr+bvec.bv_offset, rq_data_dir(req));
if(rv<0)
goto skip;
pos+=bvec.bv_len;
kunmap(bvec.bv_page);
}
skip:
blk_end_request_all(req, rv);
spin_lock_irq(q->queue_lock);
}
}
Blk_fetch_request从请求队列中获取一个请求,当没有请求需要时,返回NULL。然后while中的程序开始处理这个请求。当请求队列创建的时候,request函数绑定了它,并且提供了一个自旋锁。当调用request函数时,该锁由内核控制。因此request函数是一个原子上下文中运行的。因此在获得request时,需要通过spin_unlock_irq函数来解锁。
然后通过blk_rq_pos和blk_rq_bytes来获得请求中的位置和大小。rq_for_each_segment是一个宏定义,其遍历一个请求中的所有bio。这里插入一下对bio的介绍:
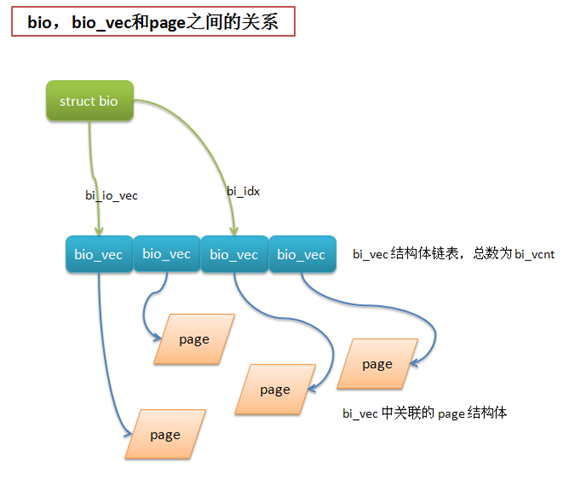
从本质上讲,一个request结构是作为一个bio结构的链表实现的。Bio结构是在底层对部分块设备IO请求的描述。Bio结构体定义如下:
struct bio {
sector_t bi_sector;//该bio结构所要传输的第一个(512字节)扇区:磁盘的位置
struct bio *bi_next; //请求链表
struct block_device *bi_bdev;//相关的块设备
unsigned long bi_flags//状态和命令标志
unsigned long bi_rw; //读写
unsigned short bi_vcnt;//bio_vesc偏移的个数
unsigned short bi_idx; //bi_io_vec的当前索引
unsigned short bi_phys_segments;//结合后的片段数目
unsigned short bi_hw_segments;//重映射后的片段数目
unsigned int bi_size; //I/O计数
unsigned int bi_hw_front_size;//第一个可合并的段大小;
unsigned int bi_hw_back_size;//最后一个可合并的段大小
unsigned int bi_max_vecs; //bio_vecs数目上限
struct bio_vec *bi_io_vec; //bio_vec链表:内存的位置
bio_end_io_t *bi_end_io;//I/O完成方法
atomic_t bi_cnt; //使用计数
void *bi_private; //拥有者的私有方法
bio_destructor_t *bi_destructor; //销毁方法
};
与bio对应的数据每次存放的内存不一定是连续的,bio_vec结构体用于描述与这个bio对应的所有内存,它并不总是在一个页面里,因此需要一个向量。IO调度算法将连续的bio合并成一个request,然后可以改善读写磁盘的性能。
遍历bio的时候,就可以定义一个transfer函数来完成bio的数据转移了。Rq_data_dir获得从request中得到数据传输方向,返回值0表示从设备读数据,非0表示写数据。Transfer中就可以通过简单的memcpy来完成数据拷贝:
static int vmem_transfer(struct vmem_device *vdev, uint64_t pos, ssize_t size, void *buffer, int write)
{
if(write)
memcpy(vdev->buf+pos, buffer, size);
else
memcpy(buffer, vdev->buf+pos, size);
return 0;
}
如果一个请求不是文件系统请求,就将请求传递给end_request。当处理非文件系统请求时,传递0表示不能成功完成该请求。
2.4 设备初始化
在块设备初始化阶段,与字符设备类似。基本过程如下:
1) 注册块设备
vmem_major=register_blkdev(0, "VMEM");
第一个参数0表示由内核自动分配主设备号,如果成功注册就返回这个主设备号,如果注册失败就返回负值。
2) 定义设备结构体
这个设备结构体是自己定义的,一般包含gendisk、设备号、请求队列等。
struct vmem_device {
struct gendisk *disk;
struct request_queue *que;
void *buf;
spinlock_t lock;
ssize_t size;
};
3) vmem_dev结构体分配和buf分配
vdev=kzalloc(sizeof(struct vmem_device), GFP_KERNEL);
if(!vdev){
printk(KERN_WARNING "vmem_device: unable to allocate mem/n");
goto out;
}
vdev->size=BLK_SIZE;
vdev->buf=vmalloc(vdev->size);
if(vdev->buf==NULL){
printk(KERN_WARNING "failed to vmalloc vdev->buf/n");
goto out_dev;
}
Buf就是一个虚拟的磁盘。
4) 初始化请求队列
vdev->que=blk_init_queue(vmem_request, &vdev->lock);
5) 分配磁盘
disk=alloc_disk(1);
6) 填充vmem_dev结构体中的信息。
vdev->disk=disk;
disk->major=vmem_major;
disk->first_minor=1;
disk->fops=&vmem_fops;
disk->queue=vdev->que;
disk->private_data=vdev;
sprintf(disk->disk_name, "VMEM");
7)注册磁盘
set_capacity(disk, BLK_SIZE/SECTOR_SIZE);
add_disk(disk);
3.实验
我们注册驱动,并看到在dev下面有VMEM设备,这个就是我们的虚拟磁盘设备文件。
然后将其格式化为ext2文件系统:
接下来我们就可以将其挂载并创建文件了。
总结
最后总结一下linux中block驱动的编写过程:
1) 填充request函数,这个函数在请求队列初始化中将喝队列绑定;
2) 定义vdev结构体,其中包含gendisk、request_queue等结构;
3) 定义设备初始化函数,并完成对disk的分配,注册,请求队列初始化工作;
4) 填充block_device_operations结构体;
5) 定义设备退出函数,主要是释放结构体;
编辑:hfy
-
Linux
+关注
关注
88文章
11849浏览量
219759 -
驱动程序
+关注
关注
19文章
874浏览量
50900 -
Block
+关注
关注
0文章
26浏览量
15180
发布评论请先 登录
驱动之路#24:Linux设备四种读写模型
如何理解Linux内核中的PCIe驱动
Linux内核驱动开发的技术核心精要
TSC427双功率 MOSFET 驱动芯片详解
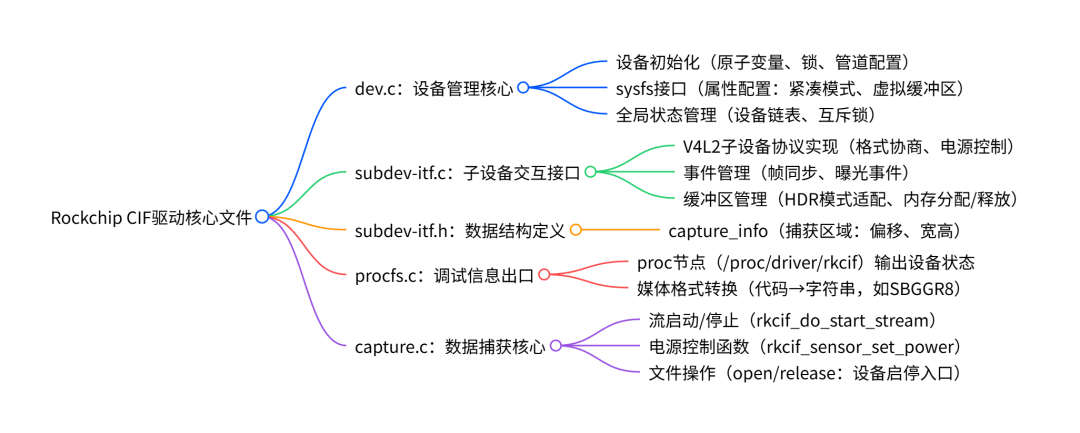
Rockchip CIF驱动深度解析:从架构设计到电源计数补丁修复
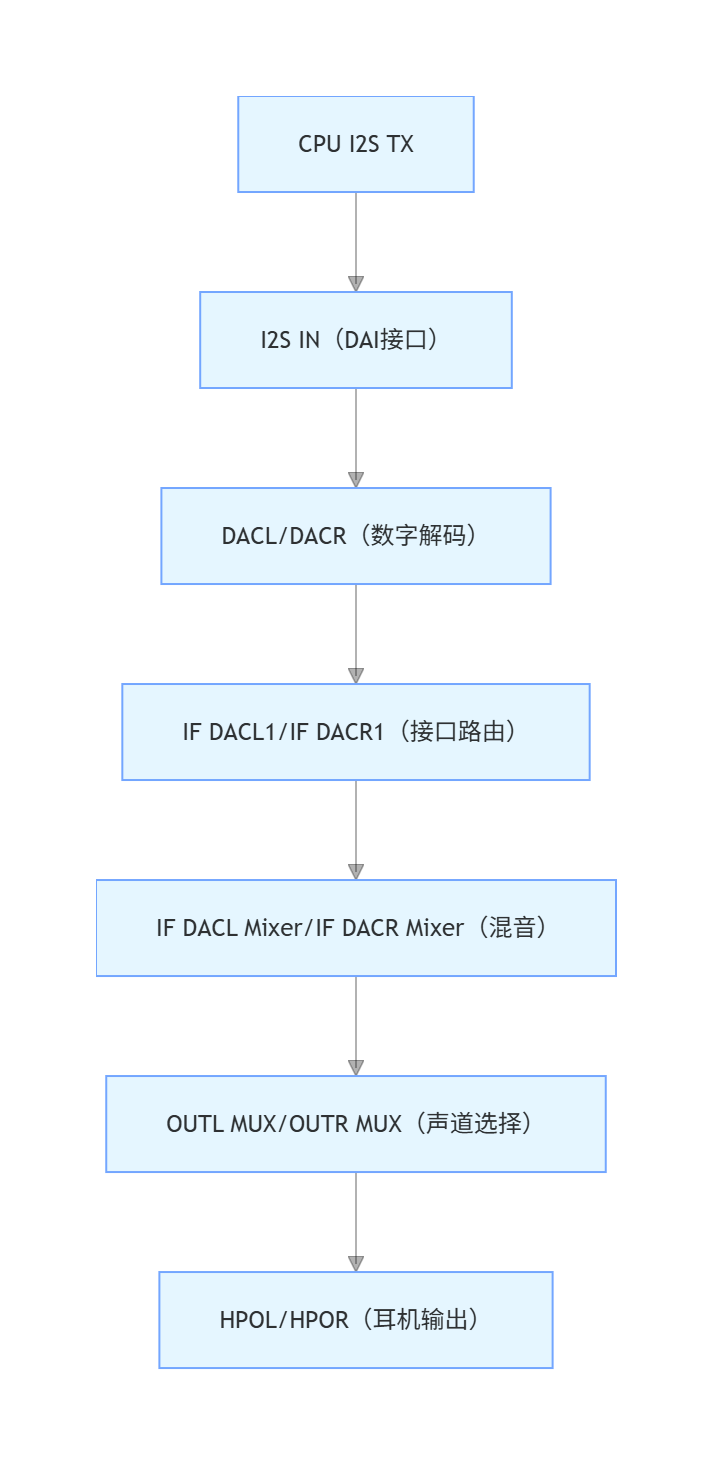
深度解析ES8389/ES8390/音频芯片Linux驱动(Linux6.1内核)
UCC27282 高电压栅极驱动器:设计与应用详解
Linux驱动开发的必备知识
【迅为工业RK3568稳定可靠】itop-3568开发板Linux驱动开发实战:RK3568内核模块符号导出详解

【免费送书】成为硬核Linux开发者:《Linux 设备驱动开发(第 2 版)》

【书籍评测活动NO.67】成为硬核Linux开发者:《Linux 设备驱动开发(第 2 版)》
Linux基础命令which详解
Linux系统中网络配置详解
Linux系统中iptables防火墙配置详解
详解Linux系统中的服务管理




评论