 浅谈机器人操作系统的演进升级
浅谈机器人操作系统的演进升级
自20世纪80年代以来,军用机器人逐渐得到广泛应用,美军的 “剑”、“魔爪”,俄军的“平台”、“阿尔戈”等机器人在走向硝烟弥漫的战场后声名大噪,助力一线作战部队效果显著。如今,人们通常熟知这些战争“怪物”,而对于控制这些军用机器人的“幕后英雄”——机器人操作系统,却鲜有关注。
一、应运而生,演进升级
本世纪初,伴随着机器人领域的快速发展和复杂化升级,程序代码的复用性和模块化需求日趋强烈,机器人行业中硬件的非标准化生产、软件的编程代码不通用等问题渐次凸显,从实用性角度来看,机器人发挥作用的关键在于具备适应多样复杂任务与环境的能力,而这一任务并非一己之功能够完成的。归结起来,机器人行业的发展应用需要可靠通用的软件与标准化高效生产的硬件,由此,机器人操作系统应运而生。
机器人操作系统是编写机器人软件的灵活框架,是用于机器人的一种开源操作系统或次级操作系统,提供了一系列工具程序和库用于获取、建立、编写和运行多机整合的程序和工具,提供的功能包括硬件抽象描述、共用功能执行、设备驱动、函数库、可视化工具、消息传递和软件包管理等等,其设计目标在于提高机器人研发代码的复用率,简化多种机器人平台之间创建复杂性和鲁棒性机器人行为的任务量。
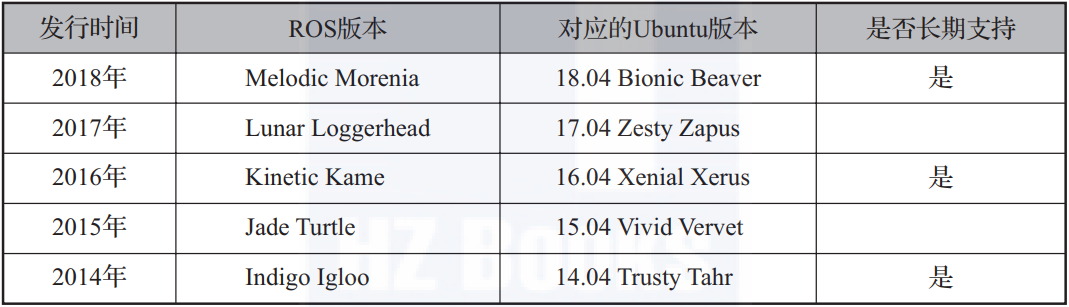
当前最通用的机器人三大操作系统为Ubuntu系统、Android系统和ROS(Robot Operating System)系统,其中Android系统使用率最高,而ROS系统则成为机器人研发领域的事实标准。相比于其它系统,ROS系统适用于协作式机器人软件开发,具有点对点设计、多语言支持、精简与集成、工具包丰富、免费且开源等优点,因此在诸多大学和研究机构被广泛应用,已成为学术界指定的创新验证平台,并衍生出了ROS-I、ROS-A、ROS-DoE、ROS-M等多个版本,其中ROS-M是ROS系统的军用版,主要应用在无人机领域。与其他操作系统相比,ROS系统的分布式和模块化有效降低了人机交互机器人的开发难度,与未来机器人智能化、人机交互的发展趋势相吻合,可能将成为最专业、最全面、功能最强大的机器人开发平台。
二、聚焦实战,基座创新
机器人操作系统是开发军用机器人的基础平台。军用机器人是用于完成以往由人员承担军事任务的自主式、半自主式或人工遥控的机械电子装置,而机器人操作系统则运行在机器人之间,是管控机器人的软件体系。操作系统使得每一位机器人设计师都能使用同样的平台进行机器人软件开发,正因如此,开发新的操作系统直接关系机器人的更新换代。一直以来,世界主要军事强国都将军用机器人作为研究重点,五角大楼每年在军用机器人领域投入数十亿美元,当前美军在此领域的开发与应用已涵盖陆、海、空、天等各军兵种,是世界上唯一具有综合开发、试验验证和实战应用能力的军队。俄罗斯则正在执行《2025年前未来军用机器人技术装备研发》综合专项计划,逐步构建军用机器人技术系统,根据俄军相关发展规划,2025年前俄军武器库中机器人的比例将达到约30%。随着现代战争日益呈现出从信息化向智能化演进的大趋势,军用机器人的应用必将越来越广泛。自20世纪60年代以来,机器人先后经历了三代演进:从“遥控操作器”到“程序执行器“,再到智能机器人,在这一创新过程中,机器人操作系统的更新升级扮演了重要角色。ROS系统诞生于2007年的斯坦福大学,在全球开发者的共同支持下,现已包含2000多个机器人平台的常用软件包。据不完全统计,仅2017年5月全球就有70000多个独立IP下载了900万次ROS程序包,且ROS开发者社区中的1840位成员一共写出了1000万行代码。
由此可见,机器人操作系统并不是一个陈旧不变的框架,而是处于不断开发与完善过程之中。目前,全球致力于开发智能机器人产品的公司数不胜数,但从基底意义上关注机器人操作系统研究开发的却是凤毛麟角,我国目前主要有三大智能机器人操作系统:Turing OS 系统、用于小i机器人的操作系统iBotOS以及ROOBO人工智能机器人系统。以上机器人操作系统侧重于机器人的系统性、决策力等不同面,由此可见智能机器人的开发并非像ROS系统那样是“大一统”的局面。此外,机器人操作系统的完善不仅需要海量的硬件适配,也需要海量的开发者参与,这也是机器人开发创新的重点所在。总之,机器人操作系统的出现实现了从底层设备控制到高层数据管理的有效集成,对于军用机器人的创新发展具有基础性价值。
机器人操作系统是实现智能化作战的技术支撑。伴随着智能化武器装备的发展与应用,未来战争的“智能化”气息扑面而来,“钢铁战士”不再只是科幻电影中的虚构形象,而日渐成为各国军方关注的重点,当前机器人已被用于侦察、排雷、防化、保障及直接攻击等各个领域。作为控制机器人的软件体系,机器人操作系统是机器人之间相互理解并遵守规则的保证,也是多机器人及异构机器人之间协同行动的平台,如同一根链条将机器人置于共同框架之下。
与计算机操作系统不同的是,机器人操作系统通过资源管理与行为管理相结合的架构,负责机器人观察-判断-决策-行动的全过程,机器人操作系统的完善是增强机器人的自主性、生存性与对抗性的关键所在,如2014年美国iRobot公司开发了一项用于提升机器人应急处置自主性的新操作系统,通过与Android程序相配套,军用机器人具备了更强的自主思考能力。再比如针对异构多机器人的协同规划与决策问题,德国人工智能研究中心(DFKI)在“分布式机器人系统集成式任务规划”(IMPERA)中使用了标准化、模块化的任务规划架构,有效弥补了各个机器人分支在信息处理和问题求解方面的局限性,增强了机器人团体自主判断及决策的合理性与准确性。在未来智能化战争时代,机器人将取代或协同部分人类参战已成大势所趋,而内嵌的机器人操作系统则直接规约着机器人的作战模式,是竞逐双方需要抢占的技术高地。
三、智能导向深度融合
在机器人应用与发展过程中,机器人操作系统发挥了重要作用。与计算机操作系统的演进过程相类似,机器人操作系统也面临着瓶颈与挑战。以往的机器人操作系统主要解决了机器人的运动控制问题,未来则需要构建一个广义的操作系统,在驱动本体的支持下,为加强机器人的语言、视觉、听觉、行动等各方面的表现进行补充与升级,完善部件驱动、环境感知、行为管理、数据传输等功能,从而增强机器人可视控制、模拟仿真、数据传输和深度学习的能力。
编辑:hfy
-
机器人
+关注
关注
211文章
28846浏览量
209339 -
操作系统
+关注
关注
37文章
6929浏览量
124031 -
运动控制
+关注
关注
4文章
596浏览量
33056 -
ROS
+关注
关注
1文章
281浏览量
17198 -
深度学习
+关注
关注
73文章
5524浏览量
121778
发布评论请先 登录
相关推荐
请问能分享ROS机器人操作系统的一些资料吗?
微软宣布Window10将正式引入机器人操作系统
机器人操作系统(ROS)是一种用于机器人开发的元操作系统
机器人操作系统ROS详细介绍
主流机器人有哪些操作系统详细资料大盘点

ROS机器人操作系统





 工商网监
工商网监
评论