 图像处理:HDMI显示代码的UVM仿真
图像处理:HDMI显示代码的UVM仿真

本篇完成对HDMI显示代码的UVM仿真,梳理一下在windows-modelsim工具下UVM仿真环境的建立,调试以及遇到的问题。
仿真架构
仿真的架构在上一篇已经做了简要介绍,这部分做重点讲解。整体结构包括五个功能模块:image图像的随机化和驱动,软件端配置,图像监测,以及设计部分。如图1.1所示。
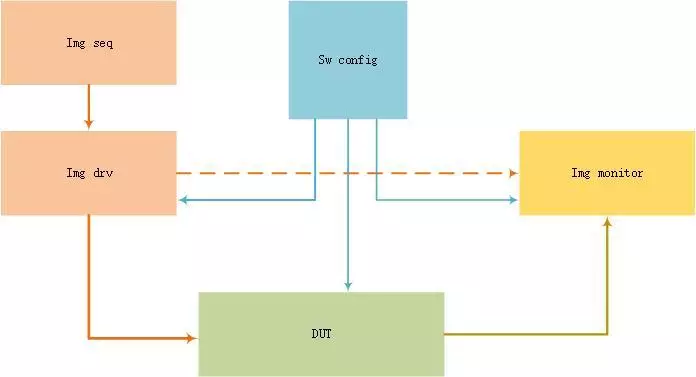
图1.1 UVM仿真验证架构
img_seq
这部分主要是生成image数据,并发送给img_drv,由img_drv驱动给到DUT。Image的随机化定义在img_trans中,这个类继承了uvm_sequence_item,定义了img数组,这是一个随机化的8bit数据组成的数组。在img_seq中通过randomize函数就可以产生随机化数据。
class img_trans extends uvm_sequence_item;
rand logic[7:0] img[3*`MAX_RESLUTN_H*`MAX_RESLUTN_V];
…
Endclass
Img_seq中对整个仿真的启动和结束做了控制,在这部分实现的原因是保证一帧图像在仿真过程中的完整性。通过设置run_time来控制可以发送多少帧图像,这个变量从命令行传进去。Starting_phase可以使得在uvm_sequence中来启动和终止仿真过程,只要指定了相应的sequence是某个sequencer的default_sequence,以及在sequencer中设置seq的starting_phase为sequencer的phase,这样就可以用sequence来启动仿真了。
if(starting_phase != null)
starting_phase.raise_objection(this);
else
`uvm_error(get_type_name(), "cannot start phase");
for(int i=0;i
if(trans.randomize() != 1)begin
`uvm_info(get_type_name(), "Failed to randomize image transaction", UVM_NONE)
end
trans.print();
`uvm_send(trans)
`uvm_info(get_type_name(), "one image have been recived", UVM_NONE)
wait(sw_inf_i.intr == 1);
end
#50;
starting_phase.drop_objection(this);
img_sqr.sv中:
virtual task main_phase(uvm_phase phase);
img_seq seq;
seq = img_seq::type_id::create("img_seq");
seq.starting_phase = phase;
seq.start(this);
endtask
img_drv
这个模块是通过img_sqr从img_seq中获得img的数据,然后通过axi接口发送给DUT。这部分主要是如何对接DUT的AXI接口,DUT通过AXI接口读取image数据,因此接口功能只实现了读操作。用一个task来实现axi_read,主要包括三个并行进程:一个是获取axi读指令,另一个是根据获得的axi读指令来发送数据,最后增加一个计数器用于处理axi等待时间过长的问题,如果超过一定时间,就报错。指令获取和发送数据的交互通过mailbox来实现,只要收到的axi指令不大于AXI接口可接收的最大transactions,就可以继续接收,否则就不接受。然后发送数据进程从mailbox中获得指令,根据指令发送对应的数据。
task img_drv::axi_read();
int abs_araddr;
int arlen_cnt;
ar_trans ar_req;
ar_trans ar_rep;
int ar_timer;
int i_size = img_size;
fork: AXI_READ_CTRL
forever begin: AR
if(ar_mbx.num() axi.s_axi_arready = 1'b1;
else
axi.s_axi_arready = 1'b0;
if(axi.s_axi_arready & axi.s_axi_arvalid)begin
ar_req = new("ar_trans");
ar_req.araddr = axi.s_axi_araddr;
ar_req.arlen = axi.s_axi_arlen;
ar_req.arid = axi.s_axi_arid;
ar_mbx.put(ar_req);
end
@(posedge axi.clk);
end
forever begin: RDATA
ar_timer = $urandom_range(`AXI_WAIT_TIMER, 0);
while(ar_timer--)
@(posedge axi.clk);
if(ar_mbx.num() == 0)begin
axi.s_axi_rvalid = 1'b0;
@(posedge axi.clk);
wait(ar_mbx.num() > 0);
end
else begin
while(!axi.s_axi_rready)
@(posedge axi.clk);
axi.s_axi_rvalid = 1'b1;
ar_mbx.get(ar_rep);
abs_araddr = ar_rep.araddr - img_start_addr;
arlen_cnt = ar_rep.arlen + 1;
if(ar_rep.araddr[10:0]+arlen_cnt*(`AXI_DATA_WD/8)>4096)begin
`uvm_error(this.get_type_name(), $sformatf("cross 4KB at address: ar_rep.araddr"));
end
while(arlen_cnt)begin
if(axi.s_axi_rready)begin
for(int i=0;i axi.s_axi_rdata[i*8 +: 8] = img_req.img[abs_araddr++];
end
arlen_cnt--;
end
if(arlen_cnt == 0)begin
axi.s_axi_rlast = 1'b1;
end
@(posedge axi.clk);
end
axi.s_axi_rlast = 1'b0;
axi.s_axi_rvalid = 1'b0;
@(posedge axi.clk);
end
end//RDATA
while(i_size)begin
if(axi.s_axi_rvalid & axi.s_axi_rready)begin
i_size--;
end
@(posedge axi.clk);
end
join_any
disable AXI_READ_CTRL;
endtask
sw_config
这部分主要是涉及到软件端对寄存器的配置,包括图像的行列大小,blank的行和列大小等。这些变量在sw_trans中随机化,为了减少仿真时间,作者减小了图像的大小约束。这应该不会影响仿真验证结果。Sw_seq就是产生随机化数据,然后发送给sw_drv。Sw_driver主要是实现axi4lite接口,发送数据给DUT。Axi4lite控制比较简单,如下:
task sw_driver::axi4lite_write(logic [`AXI4LITE_DATA_WD-1:0] data, logic [`AXI4LITE_ADDR_WD-1:0] waddr);
int timer = 1000;
repeat($urandom_range(15, 5)) @(posedge vif.axi_if.clk);
fork: AXI4LITE_SEND
begin: WRITE_DATA
vif.axi_if.axi4lite_awprot = 0;
vif.axi_if.axi4lite_awaddr = waddr;
vif.axi_if.axi4lite_awvalid = 1'b1;
if(!vif.axi_if.axi4lite_awready)begin
while(!vif.axi_if.axi4lite_awready)
@(posedge vif.axi_if.clk);
end
else begin
@(posedge vif.axi_if.clk);
end
vif.axi_if.axi4lite_awvalid = 1'b0;
repeat($urandom_range(5, 0)) @(posedge vif.axi_if.clk);
vif.axi_if.axi4lite_wdata = data;
vif.axi_if.axi4lite_wstrb = {(`AXI4LITE_DATA_WD/8){1'b1}};
vif.axi_if.axi4lite_wvalid = 1'b1;
if(!vif.axi_if.axi4lite_wready)begin
while(!vif.axi_if.axi4lite_wready)
@(posedge vif.axi_if.clk);
end
else begin
@(posedge vif.axi_if.clk);
end
vif.axi_if.axi4lite_wvalid = 1'b0;
wait(vif.axi_if.axi4lite_bvalid);
repeat($urandom_range(5, 0)) @(posedge vif.axi_if.clk);
end
begin: TIMER_CNT
while(timer--)
@(posedge vif.axi_if.clk);
`uvm_error(get_type_name(), $sformatf("wait for axi ready for long: axi4lite_awaddr = %0h, axi4lite_awready = %0d",
vif.axi_if.axi4lite_awaddr, vif.axi_if.axi4lite_awready));
end
join_any
disable AXI4LITE_SEND;
`uvm_info(get_type_name(), $sformatf("have sent sw data at address: %0x", vif.axi_if.axi4lite_awaddr), UVM_MEDIUM);
Endtask
为了将sw_trans的数据发送给其他模块,在sw_driver中通过定义:
uvm_analysis_port #(sw_trans) sw_trans_port;
在需要接收这个数据的类中声明一个port:
uvm_analysis_imp_sw #(sw_trans, img_monitor) sw_imp;
并声明后缀:
`uvm_analysis_imp_decl(_sw)
然后定义一个write函数:
function void img_monitor::write_sw(sw_trans sw_req);
img_h = sw_req.resl_h;
img_v = sw_req.resl_v;
endfunction
这样就接收到了来自sw_trans的数据。
img_monitor
这部分主要是比对数据,包括两方面,一个是比对接收到的image的图像数据R,G,B。另外一个是比对经过物理编码后的10bit的R,G,B数据。
task img_monitor::comp_rgb();
localparam AXI_DATA_BW = `AXI_DATA_WD/8;
logic [8*3-1:0] ref_rgb;
int err_cnt = 0;
int pixs;
int v=0;
int h=0;
while(v != img_v)begin
if(img_inf_i.rgb_valid && img_inf_i.rgb_ready && img_inf_i.h_sync && img_inf_i.v_sync)begin
pixs = 3 * (img_h * v + h);
ref_rgb = {img_data.img[pixs+2], img_data.img[pixs+1], img_data.img[pixs]};
if(ref_rgb != img_inf_i.rgb)begin
`uvm_error(this.get_type_name(), $sformatf("ref_rgb(%h, %h, %h) is diffrent with rgb(%h, %h, %h) at (%d, %d)", ref_rgb[8*2 +: 8], ref_rgb[8*1 +: 8], ref_rgb[7:0], img_inf_i.rgb[8*2 +: 8], img_inf_i.rgb[8*1 +: 8], img_inf_i.rgb[7:0], v, h));
err_cnt++;
end
@(posedge img_inf_i.clk);
v = (h >= img_h - 1) ? v+1 : v;
h = (h >= img_h - 1) ? h-img_h+1 : h+1;
end
else begin
@(posedge img_inf_i.clk);
end
end
if(err_cnt == 0)
`uvm_info(get_type_name(), "rgb comparison passed !", UVM_LOW)
Endtask
对物理编码数据的比较,是UVM中生成对应的数据,放到队列中,然后和DUT中的相应数据进行对比。
function void img_monitor::write_img(img_trans img_req);
localparam AXI_DATA_BW = `AXI_DATA_WD/8;
int pixs = 0;
tmds tmds_obj;
img_data.copy(img_req);
for(int i=0;i
pixs = 3 * (i * img_h + j);
tmds_obj.b = img_data.img[pixs];
tmds_obj.g = img_data.img[pixs+1];
tmds_obj.r = img_data.img[pixs+2];
tmds_obj.b = tmds_encode(tmds_obj.b, this.b_cnt);
tmds_obj.g = tmds_encode(tmds_obj.g, this.g_cnt);
tmds_obj.r = tmds_encode(tmds_obj.r, this.r_cnt);
tmds_obj.h = j;
tmds_obj.v = i;
tmds_i.push_back(tmds_obj);
end
this.b_cnt = 0;
this.g_cnt = 0;
this.r_cnt = 0;
end
endfunction
task img_monitor::comp_tmds();
localparam PREAMBLE_VIDEO = {10'b1101010100, 10'b0010101011, 10'b0101010100};//'h3542AD54
int v = 0;
int h = 0;
tmds ref_tmds_obj = new("tmds");
while(v != img_v)begin
wait(img_inf_i.tmds_valid && img_inf_i.tmds_data == PREAMBLE_VIDEO);
@(posedge img_inf_i.clk);
for(int i=0;i if(img_inf_i.tmds_data != PREAMBLE_VIDEO)
`uvm_error(get_type_name(), "video preamble is wrong!")
@(posedge img_inf_i.clk);
end
repeat(2) @(posedge img_inf_i.clk);
for(h=0;h
if(ref_tmds_obj.b != img_inf_i.tmds_data[9:0] || ref_tmds_obj.g != img_inf_i.tmds_data[19:10] || ref_tmds_obj.r != img_inf_i.tmds_data[29:20])
`uvm_error(this.get_type_name(), $sformatf("ref_tmds ( %h, %h, %h) != tmds (%h, %h, %h) at (%d, %d)", ref_tmds_obj.r, ref_tmds_obj.g, ref_tmds_obj.b, img_inf_i.tmds_data[29:20], img_inf_i.tmds_data[19:10], img_inf_i.tmds_data[9:0], v, h));
@(posedge img_inf_i.clk);
v = (h >= img_h - 1) ? v+1 : v;
end
end
`uvm_info(get_type_name(), "tmds data is compared for one frame!", UVM_LOW)
Endtask
结果
通过打印信息来判断是否通过测试。
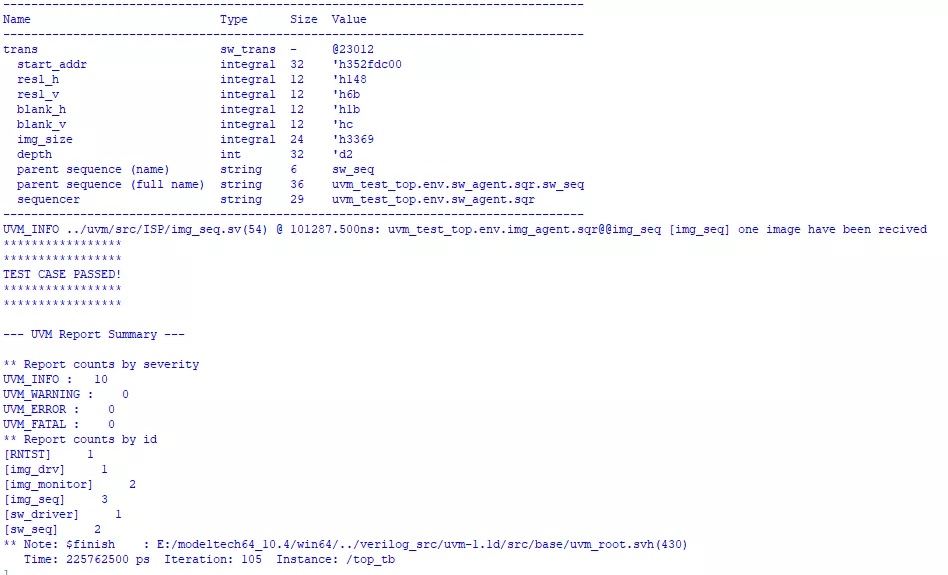
图2.1 仿真结果
-
HDMI
+关注
关注
34文章
1921浏览量
161533 -
图像处理
+关注
关注
29文章
1352浏览量
59765 -
UVM
+关注
关注
0文章
183浏览量
20118
发布评论请先 登录
FMC - HDMI:为FPGA系统增添HDMI输入的利器
IDT Reon VX:先进图像处理器的卓越之选
综合图像处理硬件平台设计资料:2-基于6U VPX的双TMS320C6678+Xilinx FPGA K7 XC7K420T的图像信号处理板
RK3506 MIPI转HDMI显示开发实战:从硬件到驱动全解析
深入剖析TMDS141:HDMI信号处理的理想选择
如何用FPGA控制ADV7513实现HDMI画面显示和音频播放

NVMe高速传输之摆脱XDMA设计24: UVM 验证包设计

NVMe高速传输之摆脱XDMA设计23:UVM验证平台
NVMe高速传输之摆脱XDMA设计18:UVM验证平台
原来HDMI线缆对辐射的影响这么大!
请问在k230上怎么使用opencv的imshow显示图像呢?
HarmonyOS应用图像stride处理方案




评论