 ZYNQ Linux操作系统移植四个部分说明文档
ZYNQ Linux操作系统移植四个部分说明文档
一、组成
ZYNQ上面移植Linux操作系统包括四个部分,uboot,devicetree,kernel,ramdisk.
其中uboot类似于bios,负责对设备进行简单的初始化,devicetree以树的形式对zynq相连的硬件设备进行描述,kernel是加载的操作系统内核,ramdisk是操作系统启动之后挂载的文件系统。
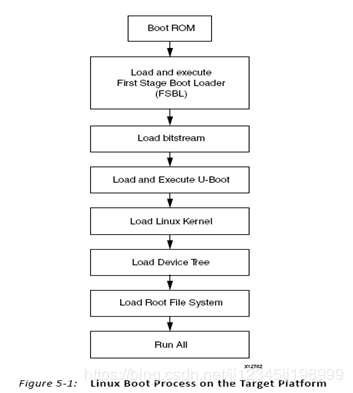
二、启动过程
移植操作系统后zynq的启动过程如下,首先加载bootrom(zynq中自带,用户无法修改),然后执行fsbl(这个根据硬件在sdk中创建),然后执行uboot,uboot会将kernel、devicetree和ramdisk载入ddr,跳转到内核入口处执行,这样linux就启动了。
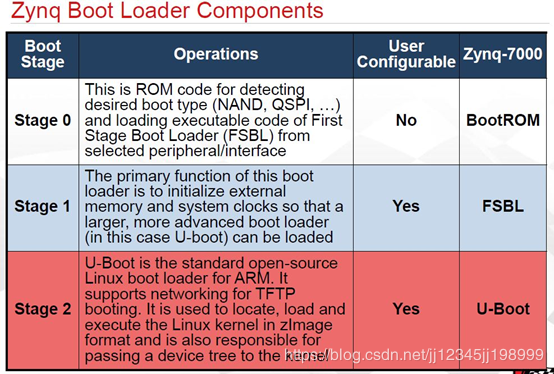
对bootrom、fsbl和uboot详细描述如下。
三、uboot设置
uboot可以从xilinx 官方github上面下载,地址是:
通常uboot不需要升级,目前使用的版本为xilinx 2015年底发布的版本2015.4.不过针对不同的模块uboot需要进行修改,主要修改下面几个地方。
1、参考时钟修改
地址位于arch/arm/cpu/armv7/zynq/clk.c
由于ZYNQ设计大多使用50M参考时钟,需要更改参考时钟
# define CONFIG_ZYNQ_PS_CLK_FREQ 33333333UL更改为
# define CONFIG_ZYNQ_PS_CLK_FREQ 50000000UL
2、串口配置修改
地址位于include/configs/zynq_zc70x.h
根据硬件串口情况进行配置
#define CONFIG_ZYNQ_SERIAL_UART1 使用串口1
#define CONFIG_ZYNQ_SERIAL_UART0 使用串口0
如果两个串口都启用,一起配置即可。
3、DDR配置修改
地址位于include/configs/zynq_zc70x.h
根据DDR实际大小地址修改配置参数
#define CONFIG_SYS_SDRAM_SIZE (1024 * 1024 * 1024) 1GB DDR
#define CONFIG_SYS_SDRAM_SIZE (512 * 1024 * 1024) 512MB DDR
4、PHY地址配置
地址位于include/configs/zynq_zc70x.h
根据硬件PHY地址进行配置,通常硬件会将PHY地址设置为0
#define CONFIG_ZYNQ_GEM_PHY_ADDR0 0
如果硬件启用了两个网卡,则需要设置两个PHY的地址
#define CONFIG_ZYNQ_GEM0
#define CONFIG_ZYNQ_GEM_PHY_ADDR0 1
#define CONFIG_ZYNQ_GEM1
#define CONFIG_ZYNQ_GEM_PHY_ADDR1 18
5、启动方式配置
地址位于include/configs/zynq_common.h
如果使用QSPI flash方式启动,需要配置QSPI FLASH对应地址,如下。
"sf probe 0 0 0 && " /
"sf read 0x3000000 0x400000 ${kernel_size} && " /
"sf read 0x2A00000 0x900000 ${devicetree_size} && " /
"echo Copying ramdisk... && " /
"sf read 0x2000000 0x920000 ${ramdisk_size} && " /
"bootm 0x3000000 0x2000000 0x2A00000/0" /
6、IP地址配置
地址位于include/configs/zynq_common.h
#define CONFIG_IPADDR 192.168.100.12 //uboot启动时板子的IP地址
#define CONFIG_SERVERIP 192.168.100.6 //uboot启动时能访问的远程服务器地址,若采用TFTP加载,需要将本地电脑配置为该地址
7、启动延迟设置
地址位于include/configs/zynq_common.h
#define CONFIG_BOOTDELAY 7 /* -1 to Disable autoboot */
Uboot默认延迟7s再从QSPI flash中加载操作系统,如果设置为-1表明禁止自动加载
8、初始化设置
地址位于net/eth.c 和 arch/arm/lib/board.c
Uboot中需要对5396进行初始化,同时使用GPIO对PHY或NOR FLASH等进行复位,可以在eth.c中增加代码
void mygpio_init()
{ }
然后将Mygpio_init()加入到arch/arm/lib/board.c中
9、Uboot编译
修改完成后,可以使用下列命令编译产生uboot
进入u-boot文件夹
$ make distclean //文件夹清理
$ make zynq_zc70x_config // 载入配置,通常使用zynq_zc70x.h文件
$ make
编译完成后文件夹下会出现u-boot文件,将其修改为u-boot.elf
四、devicetree设置
devicetree源文件可以从xilinx官方下载,地址:https://github.com/Xilinx/device-tree-xlnx/releases
不同板子的devicetree可以根据xilinx sdk生成,操作过程如下。
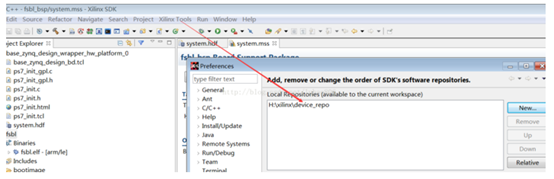
1、在XILINX SDK中打开板子的ZYNQ工程,在xilinx tools中添加devicetree的源文件地址
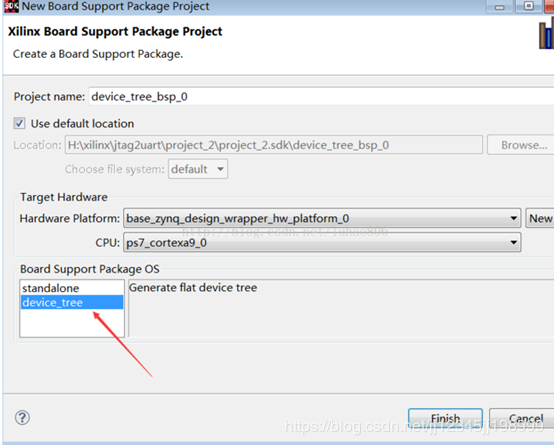
2、创建devicetree BSP文件
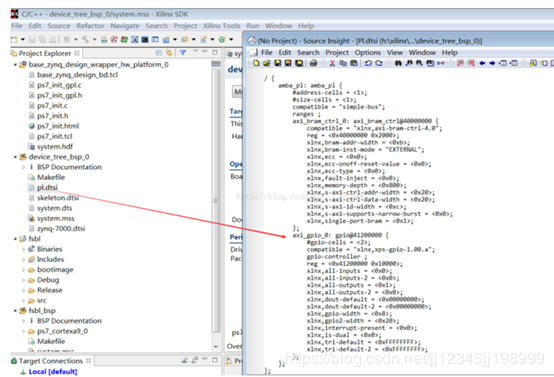
创建完成后得到文件如下
3、将dtsi,dts文件拷入linux系统下,使用dts工具制作devicetree.dtb文件
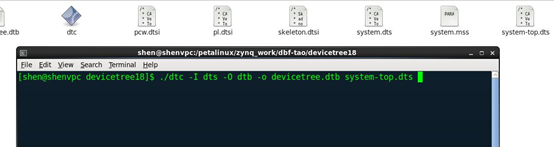
4、如果需要修改devicetree文件,可以通过dtc工具转换为可读文件dts
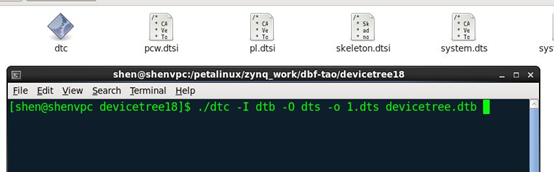
生成的1.dts可打开,里面能看到zynq端的外设信息和启用情况。通常需要修改网卡配置,如下,下例中phy地址为0
ethernet@e000b000 {
compatible = "xlnx,ps7-ethernet-1.00.a";
reg = ;
status = "okay";
interrupt-parent = ;
interrupts = ;
clocks = ;
clock-names = "ref_clk", "aper_clk";
#address-cells = ;
#size-cells = ;
enet-reset = ;
local-mac-address = [00 0a 35 00 00 00];
phy-mode = "rgmii";
phy-handle = ;
xlnx,eth-mode = ;
xlnx,has-mdio = ;
xlnx,ptp-enet-clock = ;
mdio {
#address-cells = ;
#size-cells = ;
phy@0 {
compatible = "marvell,88e1111";
device_type = "ethernet-phy";
reg = ;
linux,phandle = ;
phandle = ;
};
};
};
当对dts修改完成后,再次使用dtc工具编译产生devicetree.dtb即可
五、文件系统设置
文件系统一般随zynq开发板发布,可以从prebuit中找到文件系统的tar文件
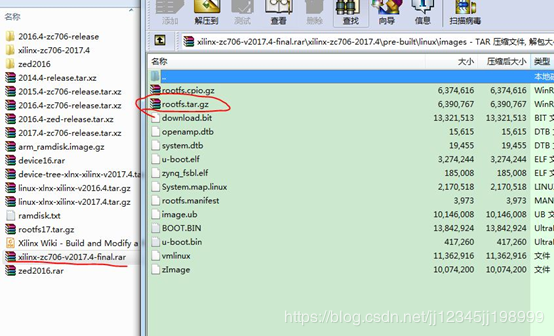
解压后得到的文件如下
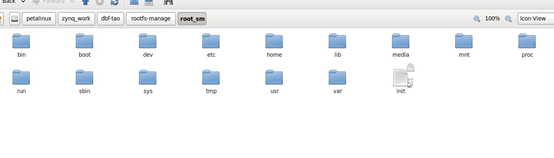
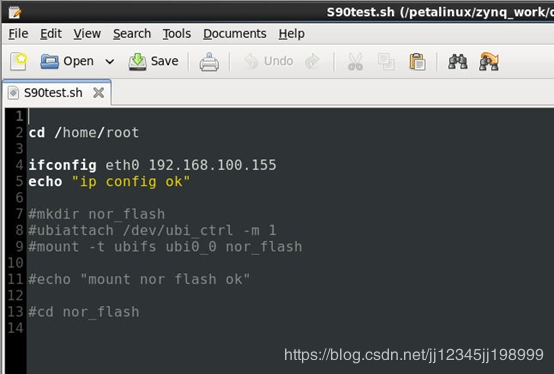
在文件系统中,如果需要添加用户自定义的shell脚本或可执行程序,可以放在/usr/bin目录下。如果要设置系统自启动项,可以在/etc/rc5.d中增加shell脚本。
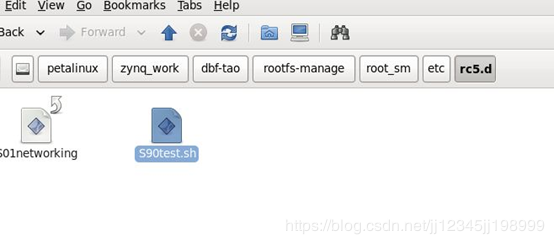
这里进行了IP地址的配置
1、文件系统制作
当修改完rootfs后,可以通过下面命令制作uramdisk文件系统
$sh -c 'cd rootfs/ && find . | cpio -H newc -o' | gzip -9 > new_initramfs.cpio.gz
$mkimage -A arm -T ramdisk -C gzip -d new_initramfs.cpio.gz uramdisk.image.gz
执行完毕将会得到uramdisk.image.gz
六、内核配置
内核可以从xilinx官方git下载,地址:
目前linux内核中已经集成了常见的驱动,驱动源码位于drivers文件夹下。针对内核的修改位于 arch/arm/configs/xilinx_zynq_defconfig文件中,该文件中定义了内核所包含的驱动程序。
1、调试输出打印
在xilinx_zynq_defconfig中,需要根据硬件设计正确配置串口打印。
CONFIG_DEBUG_LL=y
CONFIG_DEBUG_ZYNQ_UART0=y //使用串口0打印输出
CONFIG_EARLY_PRINTK=y
2、内核编译
修改完xilinx_zynq_defconfig后,可以使用下面命令编译内核
$sudo //编译内核需要运行在root权限下
$make distclean //清理文件
$make ARCH=arm xilinx_zynq_defconfig //读取内核配置信息,即xilinx_zynq_defconfig中的内容
$make ARCH=arm menuconfig //进入内核菜单进行可视化配置,如果xilinx_zynq_defconfig中对内核配置准确时,该步骤可以省略
$make ARCH=arm UIMAGE_LOADADDR=0x8000 uImage -j4 //编译产生uImage
产生的文件位于arch/arm/boot文件夹内
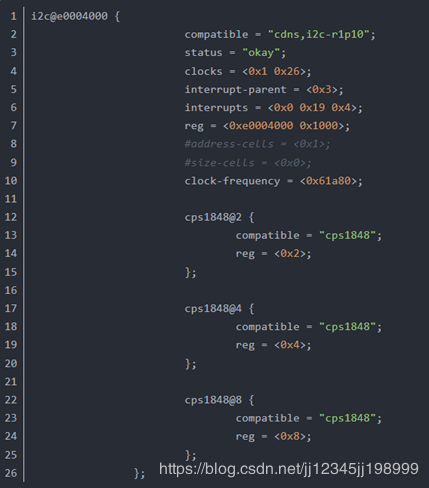
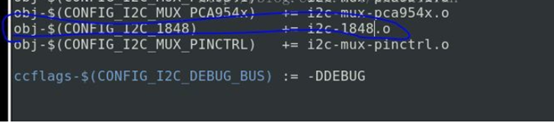
在内核中添加1848的驱动
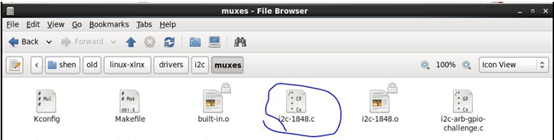
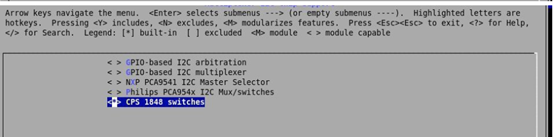
编译内核的时候加入该驱动,同时修改makefile和kconfig文件
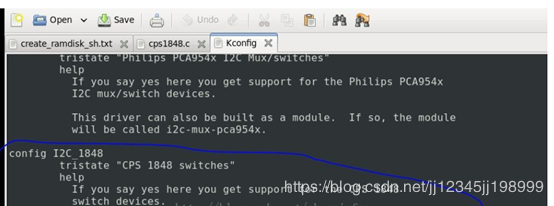
这样在编译内核的时候就能看到将驱动编进内核的选项了。
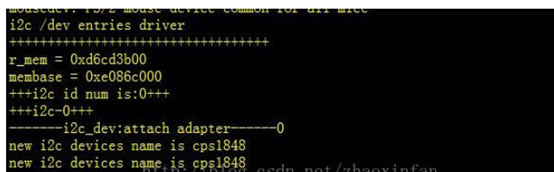
编译完内核后,启动时就能看到1848的从设备
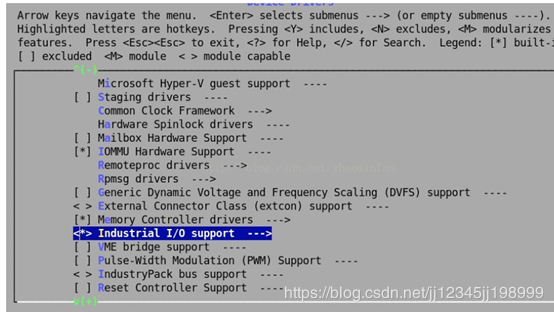
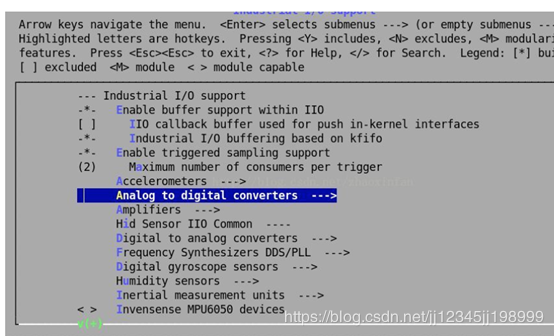
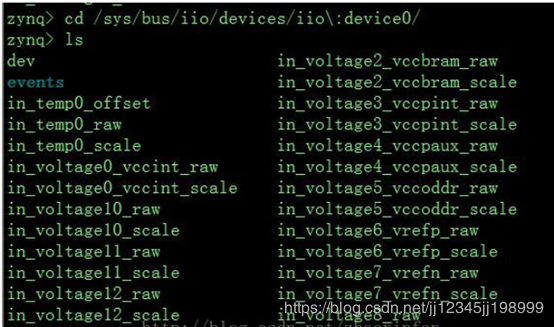
内核中启用ADC驱动
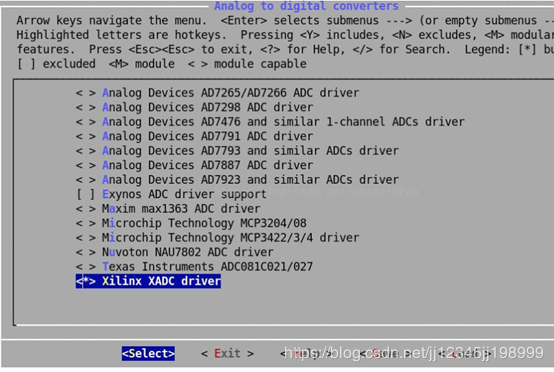
系统启动后就能看到输出了,这里输出的是温度值
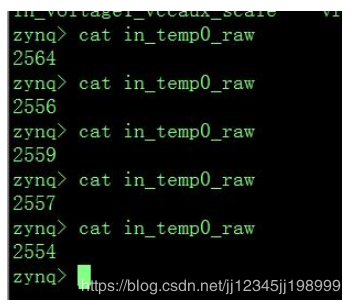
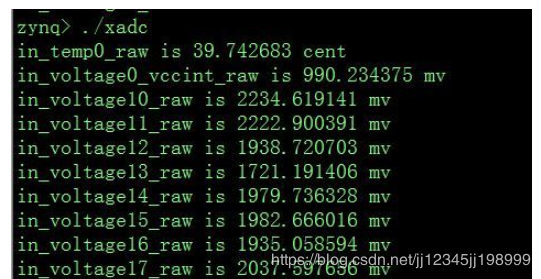
实际温度还需要进行换算,结果如下
3、NOR FLASH驱动
NOR FLAHS驱动主要实现文件系统的挂载,这里不需要设置devicetree,只需要在内核中添加挂载文件系统的代码
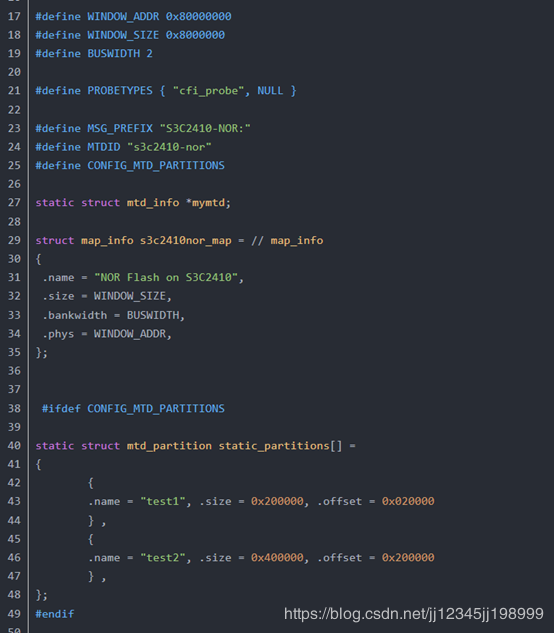
上图中将NOR FALSH分为2个区,大小分别为32MB和64MB,需要注意的是NOR FLASH的起始地址和容量大小设置
#defineWINDOW_ADDR 0x80000000 //和vivado里面的emc起始地址一致
#defineWINDOW_SIZE 0x8000000 //nor flash大小
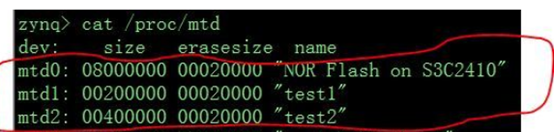
在makefile中将该驱动编译进内核即可
启动后就能看到挂载的文件系统了
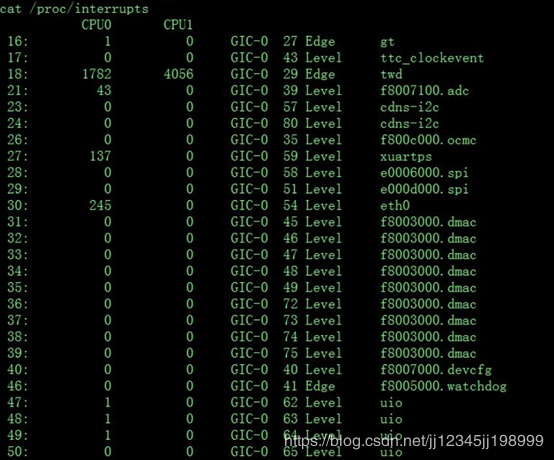
4、外部中断驱动
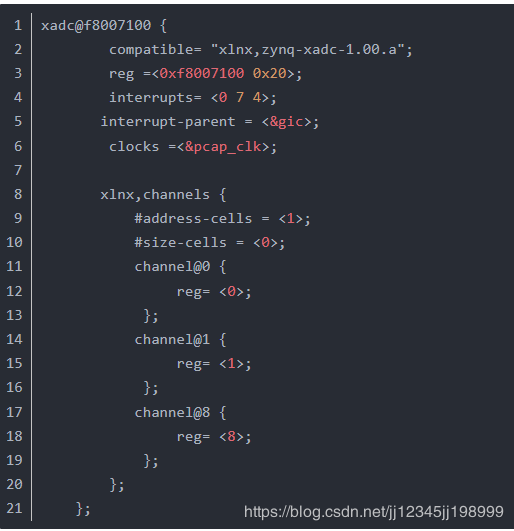
当zynq接收来自外部的GPIO中断时,需要使用UIO机制及时响应中断,首先在devicetree中模拟出四个GPIO设备
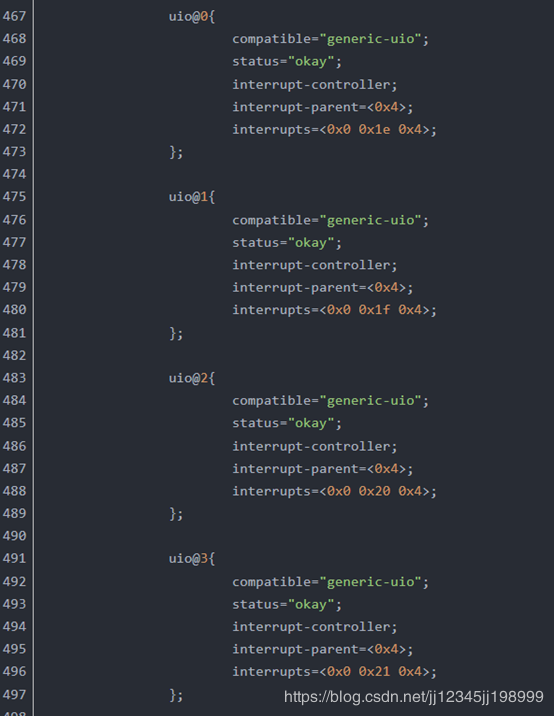
注意上面的中断号0x1e-0x21要与硬件实际相连的中断管脚一致。
同时在devicetree中启用UIO机制

在编译内核时将UIO驱动编译进内核
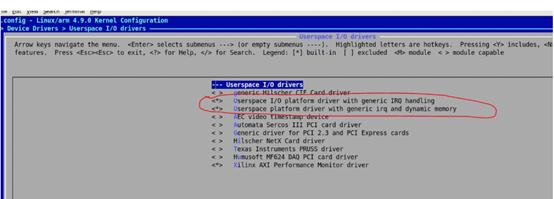
当操作系统启动完成后就能看到四个外部GPIO设备产生的中断了
八、启动文件制作
如下图所示,在SDK中创建boot.bin需要包含下面五个文件
Fsbl.elf
Zynq_top.bin
u-boot.elf
uImage
devicetree.dtb
uramdisk.image.gz
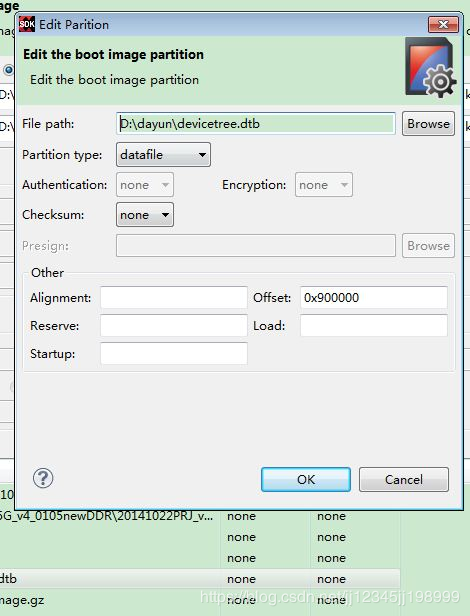
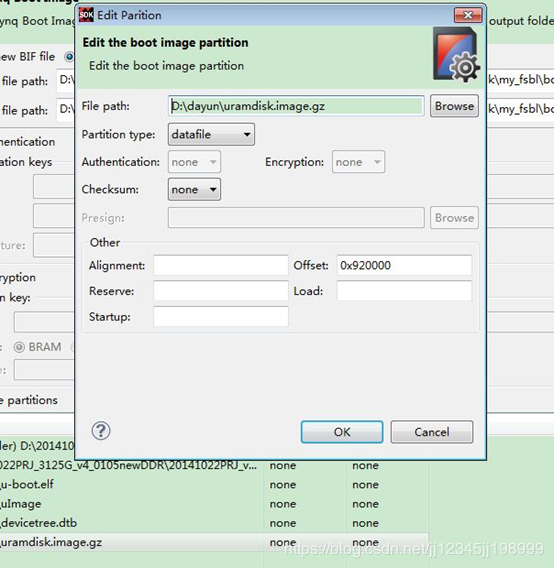
制作过程中需要正确配置uimage,devicetree.dtb,uramdisk.image.gz的地址,让其与u-boot中从QSPI flash加载地址匹配
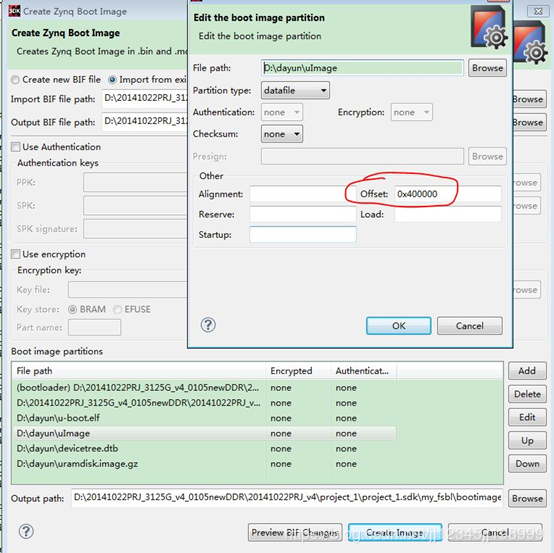
制作完成后将boot.bin通过下载电缆烧入QSPI FLASH中即可。
编辑:hfy
-
Linux
+关注
关注
87文章
11319浏览量
209830 -
操作系统
+关注
关注
37文章
6847浏览量
123427 -
Zynq
+关注
关注
10文章
610浏览量
47208
发布评论请先 登录
相关推荐
deepin操作系统介绍

IP2368寄存器说明文档
linux是实时系统还是分时操作系统
linux操作系统安装步骤 linux操作系统的特点及组成
请问TAS6424E-Q1和TAS6424-Q1的区别主要有什么 是否有官方的说明文档
超低功耗 AT方案说明文档 新增716s/718p芯片模块的固件获取以及测试方法

工业实时操作系统对比:鸿道Intewell跟rt-linux有啥区别








 工商网监
工商网监
评论