 基于5G网络的远程控制协作机器人解决方案
基于5G网络的远程控制协作机器人解决方案
随着老龄化等因素引起全球人力成本的持续上涨和劳动力短缺的问题,机器人代替传统人力已经成为不可改变的趋势 [1] 。当前工业机器人已经大量使用于制造业,尤其是在制造车间,工业机器人可以将一些重复性的人工劳动代替下来,节省人力。随着技术的进步,各种机器人产品被研发出来,使得机器人产品开始扩展到其它行业,并激发了巨大的市场空间。当前全球机器人市场飞速增长,2018年11月更新的IDC《全球机器人及无人机支出指南》 [2] 显示,中国机器人和无人机及相关服务的支出额持续高速增长,到2022年将达到805.2亿美元(约合5560亿元人民币),2018~2022年复合年增长率(CAGR)达到27%。中国是全球最大的机器人市场,预计到2022年将占全球总量的38%以上。
在一些传统的危险行业,比如地下管道远程维修、山体滑坡远程抢险、消防救人、排雷防爆等等,这些行业的操作环境恶劣,对人体危害大,这类工作可以使用机器人来执行一些人类无法处理的任务。但是在一些高危行业中,每次遇到的情况复杂,不能完全复用原来的处理方法,无法使用统一智能化算法控制机器人独立完成,需要远程人为控制。
通过在机器人安装摄像机等高清影像采集设备,将远程场景的视觉传输给控制者,控制者实时监控回传过来的视觉图像,佩戴传感器并针对场景做出相应的操作行为,机器人通过“学习”控制者的动作并同步执行,实现复杂行为的操作。即新动作不需要对机器人进行复杂的编程,而是机器人通过学习远端人类动作即可完成既定动作,完成对应的危险性工作任务,保障人身安全。
在以上场景中,远程控制机器人的实现有三个关键技术。一是高速数据传输速率:为了使得控制者能够全面清晰实时地了解现场的情况,机器人佩戴高清摄像头进行视频数据采集,高清视频的传输需要大带宽保障视频内容上行传输的流畅性与实时性;控制者佩戴的高清VR眼镜或者MR眼镜也需要大带宽保障视频内容下行传输的流畅性与实时性。二是低时延:人类控制操作者与受控机器人之间交互行为指令的实时下发,这需要网络具有低时延以保障控制者的行为可以通过传感器,实时控制机器人。三是机器人与控制者之间通信网络的快速便利部署,机器人和控制者之间如果使用有线网络,虽然网络时延和带宽可以得到某种程度上的保证,但有线使得机器人的活动范围受到限制,而且在机器人和控制者之间快速的部署网络无法便捷实现。
如果使用Wi-Fi或者4G无线蜂窝网络,由于Wi-Fi网络的抗干扰性差,以及4G网络的传输速率和时延的限制,现有无线网络带宽和时延无法稳定地满足一些高速率低时延场景。这些技术瓶颈使得远程控制协作机器人在产业实际应用中遇到重重困难,至今还无法规模发展和部署。而5G网络具有的大带宽,低时延特性,正可以解决这些技术瓶颈,5G正为远程控制协作机器人的产业发展带来新的机遇。
1 5G网络对于URLLC的支持
URLLC是5G网络的三大特性之一。5G URLLC被业界广泛认为可以应用于工业控制、工厂自动化、智能电网、设备、车联网通讯、远程手术等场景 [3-4] 。对于某个特定的业务,减少端到端的网络传输时延主要因素有以下几点构成:
(1)提高传输调度效率。根据3GPP的定义,在5G的无线空口设计中 [5] 引入了很多新技术以提高空口调度效率。比如采用更短的调度时间单位,采用更大的子载波间隔,更短的OFDM符号,引入了“迷你时隙(mini-slot)”传输机制等来实现低时延。
(2)减小中间传输节点数量,优化网络架构设计。从端到端业务角度,IP数据报文每经过一个逻辑节点或路由器的处理就会增加相应的传输时延及处理时延。尽量减少中间传输节点数量,使得服务器下沉到网络边缘,减少了数据传输路径,有利于减少中间传输节点,有利于时延的缩短。5G新技术边缘计算就是为了解决这一问题。
(3)优化网络传输协议。常用的TCP协议由于技术复杂性,当发生丢包或抖动时引入高时延,而UDP协议虽然高效但在可靠性方面存在不足,需要基于业务对时延的需求进行平衡考量以及进一步优化。
2 远程控制协作机器人解决方案
图1是远程控制机器人的系统组成图:
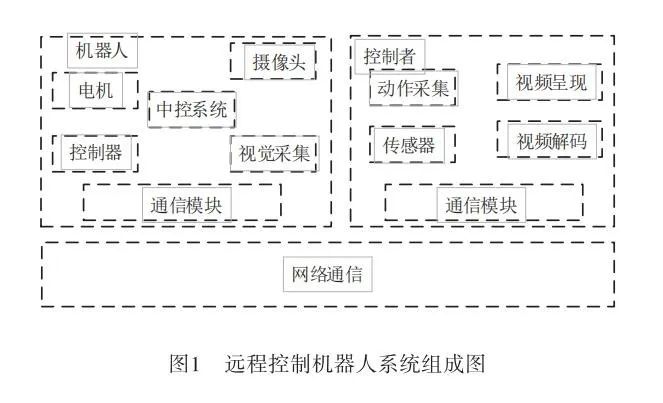
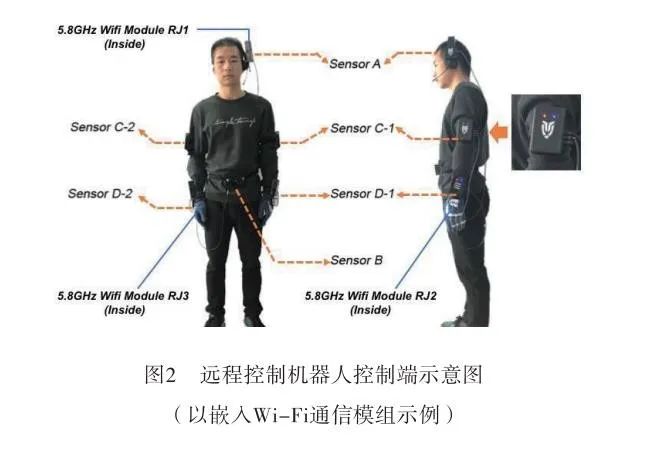
控制端操作者佩戴的传感器由A、B、C、D这几个传感器组成,A、C、D传感器实时计算和B的相对位置,每30 ms分别发送一次100 Byte左右的控制信息,控制者佩戴的传感器和机器人分别安装了通信模组,控制信息通过通信模组,通过网络将控制信息传输给机器人身上的通信模组。机器人端的通信模组每隔30 ms可以接收到控制信息,并把控制信息传到机器人各个关节电机,使机器人动作和操作者动作一致,控制者随意做出手臂动作,穿戴的手臂传感器把对应动作通过网络已建立的链路传送到机器人手臂控制器,机器人控制器根据接收到的传感命令,控制手臂做出和控制者相同的动作。其对应关系如图2所示:
3 不同网络的性能对比测试
3.1 测试方案说明
为了验证远程控制协作机器人在不同网络下的流畅度和性能对比,采用路邦ME2仿生机器人一代和路邦ME2仿生机器人可穿戴传感器,通过在实验室构造多种业务场景和多种网络场景,对不同场景下的业务性能进行测试验证和对比。远程控制机器人对网络需求主要是图像传输系统和远程控制指令传输两个方面。由于当前版本的远程控制机器人产品还没有集成高清摄像设备,在本测试中,采用在机器人侧进行数据灌包方式,模拟机器人实时采集和传输高清视频内容。中国移动5G联合创新中心发布的《5G云端机器人》 [6] 白皮书中提到机器人图像传输系统对网络需求,图像传输系统需要的带宽与图像的分辨率和VR摄像头路数有直接关系,单路25fps、1 080p分辨率需要4 Mb/s,当分辨率达到4k时,单路视频的网络带宽需要至少16 Mb/s,目前高清VR至少需要2~3路摄像头进行画面拼接才能带给用户高浸入感的用户感受。在本测试中,分别取20 Mb/s和80 Mb/s上行灌包,以模拟机器人实时采集和上传高清和超高清视频。
业务场景1:操作者与机器人之间仅指令交互;
业务场景2:操作者与机器人之间指令交互+20 Mb/s上行灌包;
业务场景3:操作者与机器人之间指令交互+80 Mb/s上行灌包。
这些场景分别在5G网络和Wi-Fi网络下进行测试,控制者随意做出手臂动作,穿戴的手臂传感器把对应动作通过5G网络建立的链路传送到机器人手臂控制器,机器人控制器根据接收到的传感命令,控制手臂做出和控制者相同的动作。由于实验室无线环境复杂,如果由路由器自动选择信道,则会出现明显的干扰,因此为了排除实验室环境的干扰,Wi-Fi测试下分别采用固定信道和不固定信道的方式进行测试和对比。
网络场景1:操作者与机器人之间通过Wi-Fi建立连接,不固定信道;
网络场景2:操作者与机器人之间通过Wi-Fi建立连接,固定Wi-Fi信道;
网络场景3:操作者与机器人之间通过5G网络建立连接。
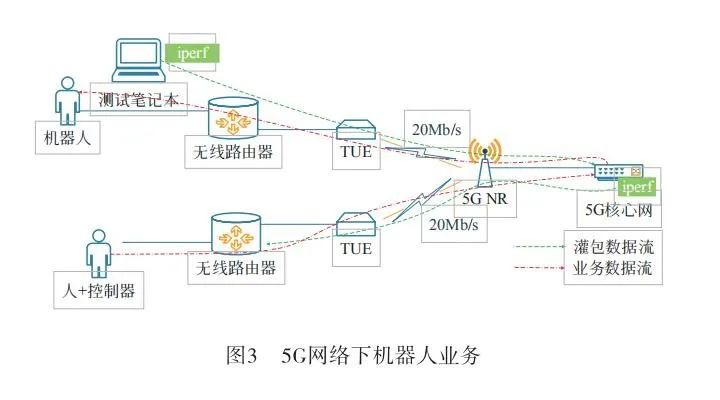
图3为5G网络下机器人业务示意图:
3.2 性能评估与测试数据采集方法
操作者的行为通过穿戴的传感器采集处理后,通过5G或者Wi-Fi网络将传感器产生的控制信息传输到机器人侧,机器人根据指令做相应的动作。
端到端ping小包时延:由测试笔记本1设置包长64 Byte
ping对端的TUE(Test User Equipment),在测试笔记本1取10分钟内ping时延的最大值、最小值、平均值(机器人的发包规律为每30 ms发送几十到一百字节左右的数据,因此ping小包(64 Byte)时延可以作为近似评判控制信息发送的时延)。
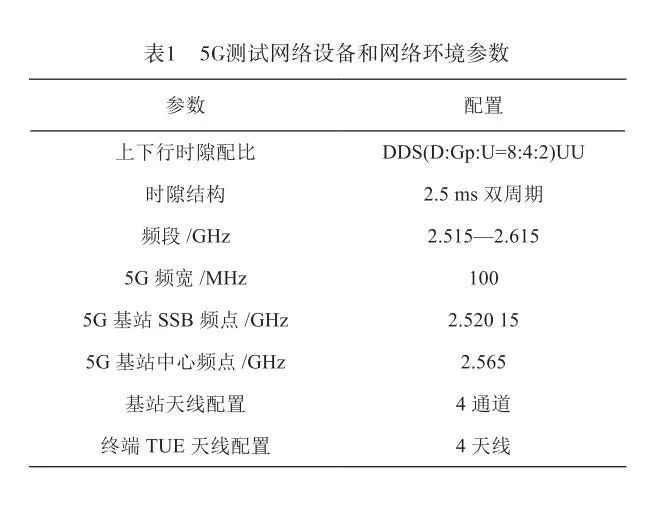
本测试中,5G NR基站(SA)和5G终端(Test User Equipment)信息如表1所示。
3.3 测试结果与分析
表2为不同网络环境下不同业务的性能对比。
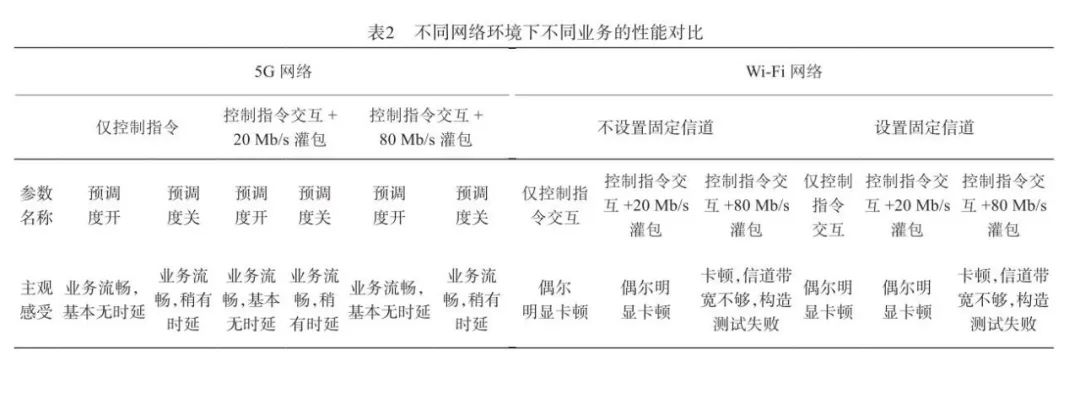
通过测试对比,可以有如下的观察与结论:
(1)5G基站预调度开关对远程控制机器人业务的时延有明显影响。开启后ping时延明显变低,在预调度特性关闭的时候,ping小包时延超过100 ms,远大于机器人发送数据的时间间隔,因此预调度关的场景下机器人会产生明显时延。
结论1:打开预调度开关有利于时延敏感业务提升性能,但现网终端设备较多时,预调度可能会造成无线资源的浪费。现网部署时应全面考虑是否开启基站预调度开关。
(2)通过灌包模拟远程控制机器人采集4k或者8k视频并上传(20 Mb/s灌包或者80 Mb/s灌包),对机器人动作流畅度无明显影响。
结论2:机器人使用高带宽传输采集4k/8k高清80 Mb/s码流视频数据业务时,对远程控制机器人操作并不影响机器人性能。
(3)Wi-Fi环境下易受到干扰。当不设置信道时,机器人收到信号干扰,导致机器人动作和控制者肉眼可见明显动作不一致;而当设置固定信道时,由于Wi-Fi信道能力的限制,灌包只能达到40 Mb/s,无法满足未来多路高清视频的传输。
结论3:5G网络无论时延还是带宽稳定性都能够稳定地支撑基于4k或者8k高清视频采集的远程控制机器人对网络传输资源的要求。远程控制机器人设备需要加快和5G模组结合的开发,直接使用5G网络提供的低时延、高可靠网络进行通信,完成机器人远程控制。
(4)此应用中,控制者的一个动作指令传输到机器人进行反应,端到端时延的环节分解如下:
1)每个传感器计算自己与传感器B的相对位置,处理时延T1;
2)每个传感器将自己位置信息每30 ms为间隔,发给控制者身上的通信模组C,传输时延T2+30 ms;
3)通信模组C将控制信令通过5G网络发送给机器人身上的通信模组R(Robot),耗时T3;
4)通信模组R将控制信息发送给机器人身上的各个关节,耗时T4;
5)各个关节执行指令,器械处理时延T5;
6)从以上整个端到端时延分析可知,网络传输时延T3只是其中一部分,还有其他设备内部的传输和处理时延开销。
结论4:在设备未经优化的情况下,5G网络只能解决一部分时延敏感度在秒级左右的应用,秒级以下的时延敏感度还需要对设备及工业传输协议进行进一步优化。
4 结束语
随着机器人技术的发展,远程控制机器人未来可应用于危机处理及涉及危险操作的工业,例如炸弹威胁、高压电流、辐射、空气污染、细菌、有害磁场等行业。5G提供的低时延高可靠网络和Wi-Fi网络相比可以使时延性能得到提升。然而,网络传输时延只是端到端时延其中的一部分,还有其他设备内部的传输和处理时延开销。在设备未经优化的情况下,5G网络只能解决一部分时延敏感度在秒级左右的应用,秒级以下的时延敏感度还需要对设备及工业传输协议进行进一步优化。未来可以通过边缘计算 [7] 以及切片网络 [8] 等5G特性对端到端网络时延性能进行进一步优化。
编辑:hfy
-
WIFI
+关注
关注
81文章
5299浏览量
203871 -
仿生机器人
+关注
关注
1文章
70浏览量
15248 -
可穿戴传感器
+关注
关注
2文章
97浏览量
12603
发布评论请先 登录
相关推荐
MiR推出MC600移动协作机器人
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃
协作机器人拽拖示教详解
风管远程控制系统应用方案
teamviewer内网远程控制外网
机器人神经网络控制原理是什么
Al大模型机器人
工业机器人数据采集远程监控平台是什么
请问mx880 5G数据终端可以设置优先5G网络吗?
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
物通博联远程PLC通讯模块通过5G网络实现远程控制PLC






 工商网监
工商网监
评论