 机械变阻器的控制器设计原理及控制命令
机械变阻器的控制器设计原理及控制命令
虽然现在有很多可以用来当做变阻器的器件:比如场效应管、X9C103数字电位器,但是由于存在非线性、寄生电容,所以在很多测量场合还是需要机械变阻器来完成。
■ 说明
在2020/9/18日,由于外部机械碰撞,使得BLUETOOTH接口断裂,整个模块就报废掉了。
01设计原理
机械变阻器
机械变阻器的控制器是由STM32F103为核心,外部使用两个A4950做起小型直流电机驱动器。通过ZIGBEE串口模块接收控制命名。
在控制上还有八个IO端口,可以通过命令任意配置成OUT,IN。
八个IO口通过左右两个相同的六管脚插座输出,从左到右分配定义为:

另外一个端口与画面定义相同,只是BIT的序号从4到8.
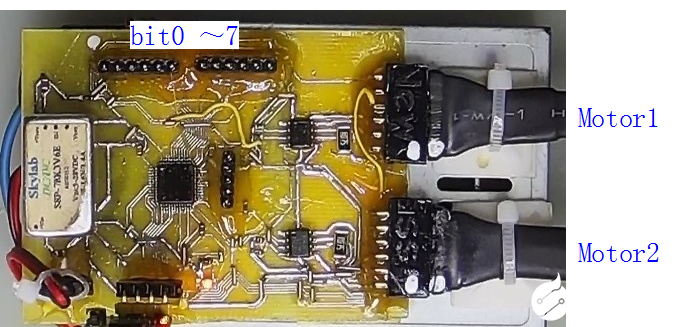
变阻器的执行部件是由带有减速齿轮箱的直流电机。直流电机配有霍尔转速吗盘。
该电机通过软塑料管可以与多圈电位器相连,通过转动带动电位器转动。
控制命令
控制命令的说明文档:
DesignCenter\MyResearch\202\机械可变电阻
控制命令在软件SerialText.C中表示:如下面代码所示:
//------------------------------------------------------------------------------
void SerialDebugProcessBuffer(void) {
SerialDebugBuffer2Argument();
if(g_ucSDANumber == 0) return;
if(strcmp("hello", (char *)STD_ARG[0]) == 0)
printf("%s is ready !\r\n", VERSION_STRING);
else IFARG0("11pwm1") {
int nNumber;
sscanf(SDA(1), "%d", &nNumber);
SetPWM1(nNumber);
}else IFARG0("11pwm2") {
int nNumber;
sscanf(SDA(1), "%d", &nNumber);
SetPWM2(nNumber);
} else IFARG0("11pwm12") {
int nNumber;
sscanf(SDA(1), "%d", &nNumber);
SetPWM12(nNumber);
} else IFARG0("varistorcount1") {
int nNumber;
sscanf(SDA(1), "%d", &nNumber);
int nPWM = 20;
if(STD_NUM > 2) {
sscanf(SDA(2), "%d", &nPWM);
if(nPWM > 50) nPWM = 50;
}
SetCount1(nNumber, nPWM);
} else IFARG0("varistorcount2") {
int nNumber;
sscanf(SDA(1), "%d", &nNumber);
int nPWM = 20;
if(STD_NUM > 2) {
sscanf(SDA(2), "%d", &nPWM);
if(nPWM >= 50) nPWM = 50;
}
SetCount2(nNumber, nPWM);
} else IFARG0("varistorsetbit") {
int nNumber;
sscanf(SDA(1), "%x", &nNumber);
SetBit((unsigned char)nNumber);
} else IFARG0("varistorclearbit") {
int nNumber;
sscanf(SDA(1), "%x", &nNumber);
ClearBit((unsigned char)nNumber);
} else IFARG0("varistorsetbitvalue") {
int nNumber;
sscanf(SDA(1), "%x", &nNumber);
SetBitValue((unsigned char)nNumber);
} else IFARG0("varistorgetstatus") {
char szString[32];
sprintf(szString, "%d %d %d\r\n", GetBitValue(), GetCount1(), GetCount2());
printf("%s", szString);
int nLength = strlen(szString);
int i;
for(i = 0; i < nLength; i ++) {
UART2SendChar(szString[i]);
}
} else IFARG0("varistorsetbitoutin"){
int nNumber;
sscanf(SDA(1), "%x", &nNumber);
SetBitOutIn((unsigned char)nNumber);
}
在JPGA25DOP中带有Python调用命令程序函数,相应的命令见下面的代码:
#!/usr/local/bin/python # -*- coding: gbk -*- #============================================================ # JPGA25.PY -- by Dr. ZhuoQing 2020-01-26 # # Note: #============================================================ from head import * from tsmodule.tshardware import * def jpgasetbitoutin(bit): ccloadSerial.write(b'varistorsetbitoutin %x\r'%bit) def jpgagetstatus(): if ccloadSerial.inWaiting() > 0: ccloadSerial.read(ccloadSerial.inWaiting()) ccloadSerial.write(b'varistorgetstatus\r') for i in range(100): if ccloadSerial.inWaiting() > 0: break time.sleep(0.01) time.sleep(0.01) return ccloadSerial.read(ccloadSerial.inWaiting()) def jpgasetbitvalue(bit): ccloadSerial.write(b'varistorsetbitvalue %x\r'%bit) def jpgarun1(step, speed=20): ccloadSerial.write(b'varistorcount1 %d %d\r'%(step, speed)) def jpgarun2(step, speed=20): ccloadSerial.write(b'varistorcount2 %d %d\r'%(step, speed))
测试结果
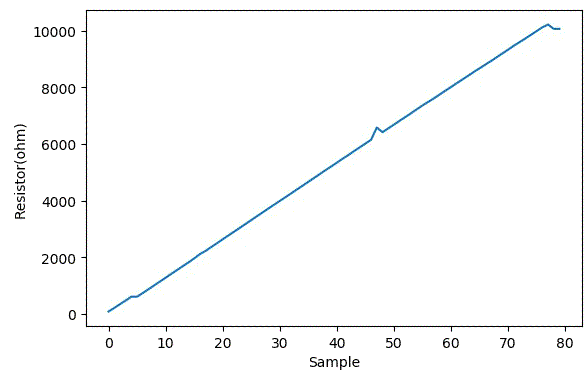
通过以下代码,使得变阻器变动,通过DM3068数字万用表测量电阻。 变阻器的引脚三个,从右到左,分别是滑动端,固定端1,固定端2.
指令中,如果RUN的参数为正,则滑动端与固定端2的电阻减少,与固定端1的电阻增加。 移动总步数大约为4500。
由于使用ZIGBEE进行命令控制,其中会出现丢失命令数据包的情况,所以在移动过程中电阻的变化会出现暂留的情况。
下面是对于第二个电阻测试的结果。每移动一次,测量滑动端至固定端2 之间的电阻。
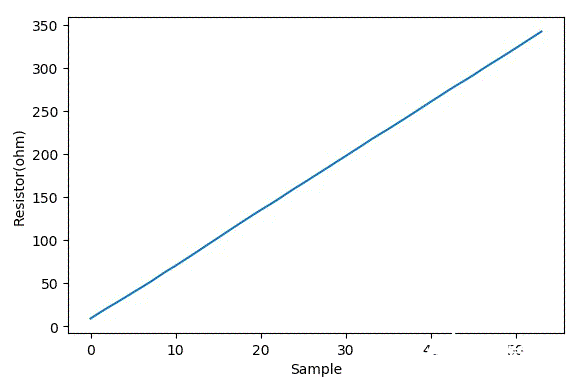
#!/usr/local/bin/python # -*- coding: gbk -*- #============================================================ # EXE1.PY -- by Dr. ZhuoQing 2020-01-26 # # Note: #============================================================ from headm import * from tsmodule.tsvisa import * dm3068open() from jpga25 import * #------------------------------------------------------------ jpgarun2(5500, 50) #exit() time.sleep(2) #------------------------------------------------------------ resdim = [] pltgif = PlotGIF() for i in range(80): jpgarun2(-50, 20) time.sleep(.5) res = dm3068res() printff(i, res) resdim.append(res) plt.clf() plt.plot(resdim) plt.xlabel('Sample') plt.ylabel('Resistor(ohm)') plt.pause(.01) pltgif.append(plt) pltgif.save(r'd:\temp\res.gif', 50, 3000) jpgarun2(5500, 50)
编辑:hfy
-
控制器
+关注
关注
113文章
16573浏览量
180414 -
场效应管
+关注
关注
47文章
1179浏览量
64809 -
数字电位器
+关注
关注
4文章
267浏览量
83464 -
变阻器
+关注
关注
0文章
95浏览量
16528
发布评论请先 登录
相关推荐


UCD90320定序器和系统健康控制器PMBus命令参考

电机控制器原理是什么?类型有哪些?


机械压力控制器使用与调整方法
机械式压力控制器的基本工作原理






 工商网监
工商网监
评论