 十分钟学会在PYNQ-Z2板卡开发IoT应用!
十分钟学会在PYNQ-Z2板卡开发IoT应用!
在本教程的带领下,你将在十分钟内学会在PYNQ-Z2板卡上使用传感器和LED开发自己的IoT应用!
初始化板卡
from pynq.overlays.base import BaseOverlay
base = BaseOverlay("base.bit")
初始化LED Bar
Grove LED bar上有10个LED灯,8个绿色的LED,一个橘黄色的LED和一个红色的LED。每个LED的亮度都可以独立被控制。我们将会在Z2板卡上外接一块Arduino Shield扩展板,LED bar连接在扩展板的D6接口上。
from pynq.lib.arduino import Grove_LEDbar
from pynq.lib.arduino import ARDUINO_GROVE_G4
# Instantiate Grove LED Bar on Arduino shield G4
ledbar = Grove_LEDbar(base.ARDUINO, ARDUINO_GROVE_G4)
ledbar.reset()
初始化超声波传感器
Pmod-grove扩展板连接在PMODA接口上,超声波传感器连接Pmod-Grove转接器的G1接口上的
%%microblaze base.PMODA
#include "xparameters.h"
#include "xtmrctr.h"
#include "gpio.h"
#include "timer.h"
#include
#define TCSR0 0x00
#define TLR0 0x04
#define TCR0 0x08
#define TCSR1 0x10
#define TLR1 0x14
#define TCR1 0x18
#define MAX_COUNT 0xFFFFFFFF
void create_10us_pulse(gpio usranger){
gpio_set_direction(usranger, GPIO_OUT);
gpio_write(usranger, 0);
delay_us(2);
gpio_write(usranger, 1);
delay_us(10);
gpio_write(usranger, 0);
}
void configure_as_input(gpio usranger){
gpio_set_direction(usranger, GPIO_IN);
}
unsigned int capture_duration(gpio usranger){
unsigned int count1, count2;
count1=0;
count2=0;
XTmrCtr_WriteReg(XPAR_TMRCTR_0_BASEADDR, 0, TLR0, 0x0);
XTmrCtr_WriteReg(XPAR_TMRCTR_0_BASEADDR, 0, TCSR0, 0x190);
while(!gpio_read(usranger));
count1=XTmrCtr_ReadReg(XPAR_TMRCTR_0_BASEADDR, 0, TCR0);
while(gpio_read(usranger));
count2=XTmrCtr_ReadReg(XPAR_TMRCTR_0_BASEADDR, 0, TCR0);
if(count2 > count1) {
return (count2 - count1);
} else {
return((MAX_COUNT - count1) + count2);
}
}
unsigned int read_raw(){
gpio usranger;
usranger = gpio_open(PMOD_G1_A);
create_10us_pulse(usranger);
configure_as_input(usranger);
return capture_duration(usranger);
}
使用python即可调用超声波传感器
from pynq import Clocks
def read_distance_cm():
raw_value = read_raw()
clk_period_ns = int(1000 / Clocks.fclk0_mhz)
num_microseconds = raw_value * clk_period_ns * 0.001
if num_microseconds * 0.001 > 30:
return 500
else:
return num_microseconds/58
案例展示:超声波测距仪
靠近测距仪50cm以内,LED每近5cm多亮一格
按BTN3结束
import time
import math
btns = [base.buttons[index] for index in range(4)]
ledbar.reset()
done = False
while not done:
if (btns[3].read()==1):
ledbar.reset()
done = True
distance = read_distance_cm()
if distance ledbar.write_level(10-math.floor(distance/5), 3, 1)
else:
ledbar.write_level(0, 3, 1)
time.sleep(0.1)
编辑:hfy
-
led
+关注
关注
242文章
23241浏览量
660506 -
IOT
+关注
关注
187文章
4200浏览量
196648
发布评论请先 登录
相关推荐
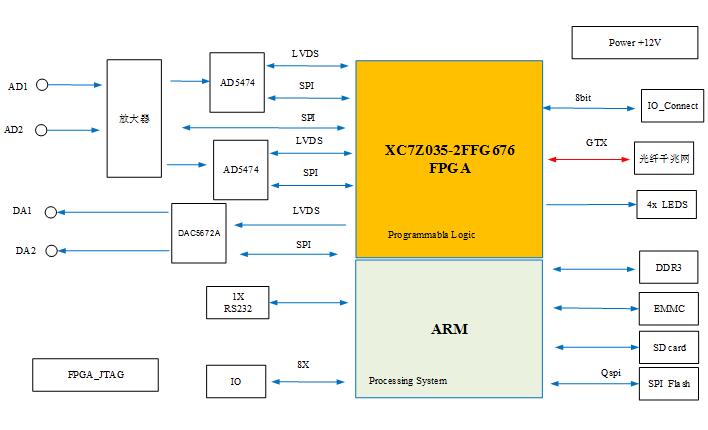
模拟计算板卡设计方案:429-基于XC7Z035+ADS5474的2路400Msps AD 光电脉冲采集处理卡
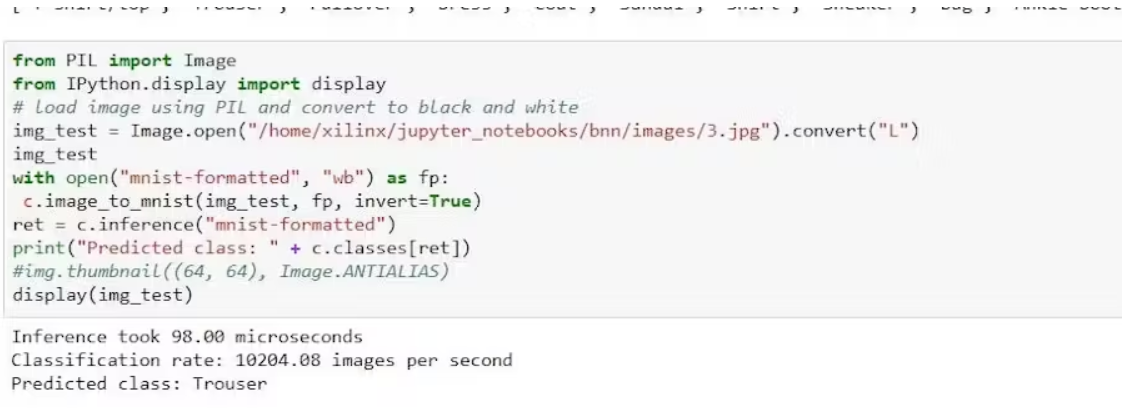
基于PYNQ和机器学习探索MPSOC笔记

冷机启动板卡时,LMX2572锁定时间在2分钟以上,为什么?
无人机的发展十分火热在哪些领域都有所应用
INA122U如何让上电就能在短时间让ADC采集值趋于稳定?
三十分钟入门基础Go Java小子版
安徽合肥启动全省首条无人机医疗物资飞行航线
stm8l051 RTC LSI作为实时时钟不准怎么校准?
STM32CubeIDE编译就卡住是什么原因导致的?
用stm32cubemx的串口中断接收时,过一段时间串口中断不进了怎么解决?
5分钟学会制作高速吹风机







 工商网监
工商网监
评论