 为何信标使用Chirp声音来进行声音导航(滤波器匹配)
为何信标使用Chirp声音来进行声音导航(滤波器匹配)
在调试声标定位算法过程中,为什么使用自己的声音,反而比使用信标发出的Chirp声音更加的精确和稳定?
博文“反过来,正过去”给出了标准信标信号的长度以及改进的方式,即不再留有空白时间段,直接重复播放Chirp信号。
后来该同学在留言中给出了回复,提到将声音采用率降低到10kHz,采样时间延长的0.2048秒,也就是Chirp声音的标准长度的时候,所获得的计算结果就平稳了。他认为由于单片机内存有限,所以需要在计算的精度、分辨率之间做权衡。因为降低了采样率,这就使得声音的判断分辨率降低了。
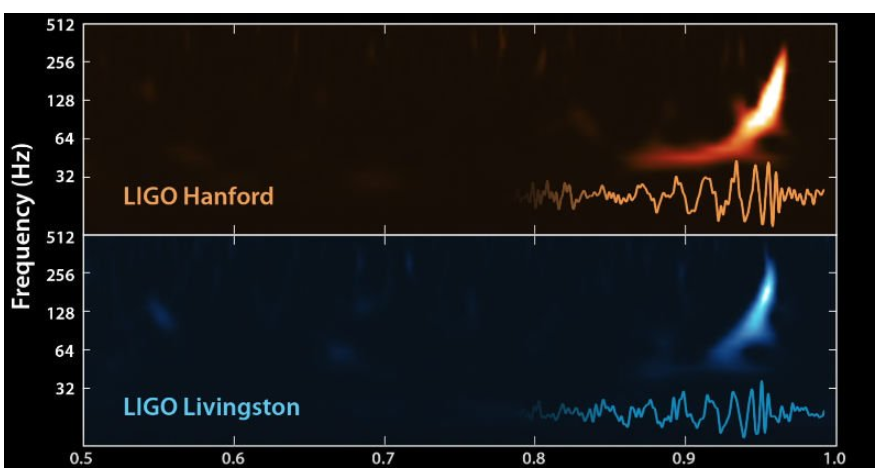
▲ LIGO探测到引力波的Chirp信号
这次,不讨论如何提高声音延迟时间算计的精度,只是讨论为何信标使用Chirp声音来进行声音导航。
1. 声音传播中的变化因素
声音电信号f 0 ( t ) 经过扬声器发出,空间传播并受到干扰,然后在有麦克风接收放大之后形成接收信号f 1 ( t ) 通过相关运算来计算延时时间。影响计算结果精度的因素很多,主要包括有:
声音幅值变化了;
声音的相位出现了非线性变化。纯延迟只能产生线性相位的变化。如果传播过程中出现了多径传播,则会有非线性变化的相位;
叠加有干扰噪声;
电路放大过程中的失真和噪声干扰等。
2. 噪声造成计算结果精度下降

▲ Chirp信号以及它的自相关

▲ 自相关信号中心位置的波形
3. 普通声音

▲ 录制的几段普通的声音信号

▲ 采集到的声音信号波形
滤波器的作用
无情的岁月在老照片上留下的量斑斑痕迹,通过滤波(AI智能照片修复)
▲ AI修复的老照片
回复被污染的二值信号
复原脸
去除老唱片的问题
滤除波动
取出漂移
信号是如何被污染的?
已知信号与噪声的区别?
使用什么手段?
匹配滤波器
▲ 雷达信号
1. 为什么匹配滤波器最优?

▲ 已知信号,消除噪声

▲ 匹配滤波器的单位冲激响应
编辑:hfy
-
滤波器
+关注
关注
161文章
7845浏览量
178397 -
chirp
+关注
关注
0文章
6浏览量
4813
发布评论请先 登录
相关推荐
关于SAW与BAW RF滤波器
用TAS5711把一路声音分到两路输出,为什么在GDE生成的数组写进去对应的寄存器,滤波器并不起作用?
全通滤波器用于声音信号的延时,其中的运放选择需要注意哪些参数?
emi滤波器是什么滤波器
陷波滤波器怎么进行滤波
如何对一个滤波器进行50欧姆的阻抗匹配?
高通滤波器和低通滤波器判别方法
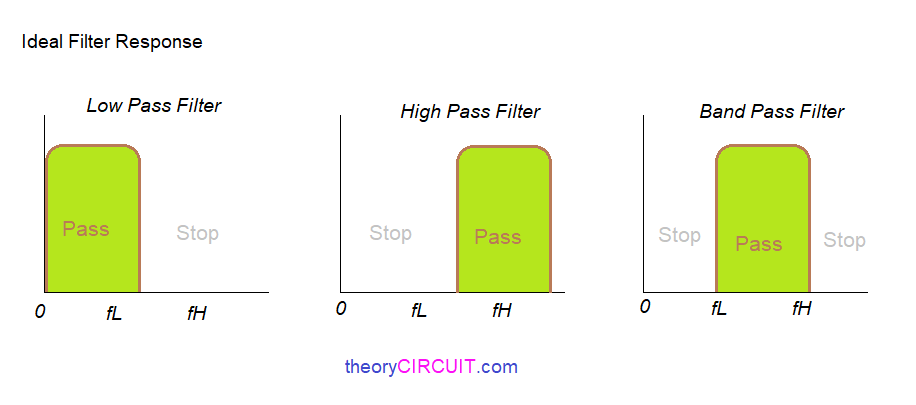
低通滤波器、高通滤波器、带通滤波器的简单介绍
高通滤波器和低通滤波器的区别
带通滤波器和带阻滤波器哪个更适合音频处理
放大音频信号用什么滤波器
声表滤波器与双工器是一种东西吗?它们之间有什么不同?
声音传感器分类有哪些?声音传感器的规格、应用及工作原理






 工商网监
工商网监
评论