 基于硬件的车载摄像头车道偏离预警系统仿真测试方案
基于硬件的车载摄像头车道偏离预警系统仿真测试方案
为了更加高效地完成车载前视摄像头车道偏离预警系统功能的测试验证, 提出了一种车载摄像头在环的仿真测试方案。将某量产车载摄像头集成于硬件在环实时仿真系 统并通过 CAN 通道实时通讯,借助场景建模软件实现不同道路、天气、能见度等仿真工况的搭建, 然后通过自 动化测试软件,进行全局测试用例的配置,以检测该摄像头车道偏离 预警系统的性能。
结果显示:该仿真测试方法能较好地实现摄像头功能逻辑及性能测试试验, 不同工况下摄像头的性能差别较大,为后期该摄像头车道偏离预警系统的优化及实车测试提供了参考。
先进驾驶辅助系统( ADAS) 是汽车智能化的重要一环,包括前向碰撞预警( FCW) 、自 适应巡航( ACC)、车道偏离预警系统( LDW) 等 , 在提高行车安全、缓解交通拥堵等方面具有重要的实用意义。
其中, 车道偏离预警系统主要依靠车载视觉传感器完成车道线的检测, 当驾驶员出 现无意识偏离行为时, 通过报警来引起驾驶员 的注意,以保证车辆的行驶安全。
对于车道偏离预警系统功能的测试验证, 大多通过受控场地试验来完成,但是存在人力和物力成本较大、试验过程繁琐且对车辆控制要求较高的不足, 尤其是一些特殊场景难以重复性再现。
硬件在环测试方法作为在环测试的一个重要环节,实现了车辆 ADAS 功能 V 型开发流程中模型在环、软件在环与整车在环的有效衔接。各种在环测试方法在 V 型开发流程中的应用也使得车辆 ADAS 功能开发验证更加系统高效 。国内外研究人员在相关方面做了较多研究 。
本文则提出了一种基于 NI 实时仿真系统的车载摄像头车道偏离预警系统的仿真测试方法, 通过搭建包含视频暗箱、CAN 通信等在内的硬件在环仿真平台,完成了对某量产车载摄像头车道偏离预警系统功能逻辑及性能参数的仿真测试验证工作,找出该摄像头存在的不足, 使其后期优化完善更具针对性。
01、摄像头在环测试系统搭建
为了完成车载摄像头车道偏离预警系统仿真测试研究,本文搭建了一套摄像头在环仿真测试系统,其主要由 NI PXI 实时仿真系统、高精度车辆动力学模型、高保真场景模型、待测摄像头、视频暗箱、CAN 信号模块、可编程电源以及自动化测试软件组成,系统框图如图 1 所示。
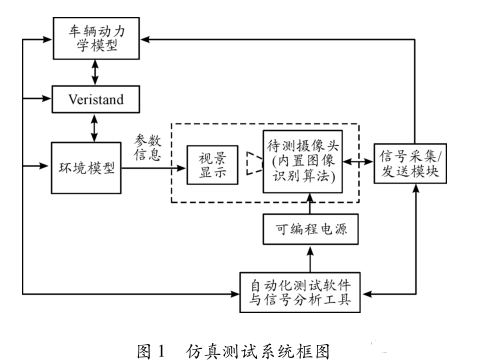
Veristand 是 NI 公司针对 PXI 实时仿真测试系统而开发的软件环境, 用来配置相关板卡的输入输出、部署车辆动力学模型, 并完成相关参数接口的映射连接。通过该软件设计车道偏离系统监控界面从而实时监控测试车辆相关状态参数。
高精度动力学模型在 PXI 实时仿真系统中运行, 实时再现仿真车辆的动力学特性。测试环境模型主要通过高保真场景建模软件搭建, 可自由配置天气、能见度等环境因素并模拟不同的交通状况, 完成某些危险或难以进行重复性测试的场景再现,相关环境模型通过视景显示装置作为摄像头的采集输入。
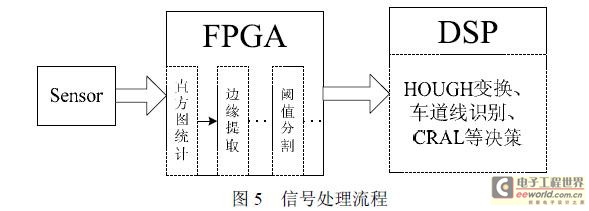
为了更好地贴合测试规程要求, 避免道路两侧其他物体的干扰, 基本环境效果如图 2 所示;摄像头采集部分包含待测摄像头、视景显示及暗箱,通过实时拍摄场景模型画面完成对车道信息的采集,如图 3 所示;可编程电源则为摄像头上下电提供电源支持;自动化测试用例及流程配置主要通过自动化测试软件实现, 同时结合 CAN 信号分析工具, 完成对车道线识别以及车道偏离预警信号的提取与分析。
测试时, 车速信息由 高精度动力学模型通过CAN 通道发送至摄像头以激活车道偏离系统。暗箱中的待测摄像头实时拍摄环境模型所展示的场景画面并完成车道线信息的采集。如图 4 所示,可以直观监测到环境状况以及车道线识别情况,如果车道线被检测到且没有报警, 则检测到的车道线为绿色,报警时为红色。
同时,将车道识别信息或偏离预警信息发送至使用 Veristand 所设计的车道偏离预警系统监控界面,控制摄像头的供电、发动机点火及 LDW 系统的开关,监控车辆的速度、航向角、与车道线的距离及是否 报警等信息, 便于实时了 解车辆及LDW 系统的工作状态, 如图 5 所示。
自动化测试软件则按照所编写的测试用例调配环境模型参数并实时监测车辆和摄像头的状态信息, 实现不同测试流程的切换及测试结果的判断。
02、测试试验流程设计
在对具有车道偏离预警系统的量产摄像头进行测试时,要重点关注其车道识别及偏离报警的稳定性、准确性,可参照中国汽车工程研究院股份有限公司( 简称中国汽研) 国家智能汽车集成系统试验区( i - VISTA) 发布的《车道偏离预警系统试验规程》进行标准性能试验。
同时, 参照其功能定义完成功能逻辑测试, 更进一步分别设计不同天气、路面积水、能见度等情况下的环境模型,实现更深入的环境适应性测试。最后, 借助自动化测试软件快速高效地依次完成所设计的性能试验、功能逻辑试验及环境适应性试验。
2.1性能试验
性能试验是中国汽研针对智能网联汽车发布的中国智能汽车指数体系中的重要试验。本文参照该体系中的《车道偏离预警系统试验规程》对待测摄像头进行测试, 检验标准工况下其基本性能表现。该试验规程设计试验工况如表 1 所示, 车道偏离试验方法示意图如图 6 所示。
2. 2功能逻辑试验
功能逻辑试验重点关注摄像头的逻辑状态,检测其在要求条件下能否实现 LDW 系统不同状态的转换,其状态转换逻辑如图 7 所示。
在该试验中, 利用可编程电源模块对摄像头进行供电,通过实时系统的模拟信号板卡设计系统状态逻辑图中的各种状态供电情况测试用例,分别设置并控制电源开关、发动机点火开关、LDW系统开关以及车速等参数来验证其状态逻辑切换是否合理。
主要针对摄像头上下电、系统开启 /关闭、系统激活 /退出 3 种逻辑转换进行测试, 具体试验工况如表 2 所示。
2. 3 环境适应性试验
性能试验中天气状况良好, 针对典型工况对摄像头的基本功能进行试验。环境适应性试验重点关注不同天气环境下摄像头车道识别及偏离报警的准确性、稳定性。
在环境适应性试验中, 道路结构、车道线规格以及偏离速度等与性能试验一致,主要增加不同的天气环境模型, 模拟实车试验中较难重复性验证的雨雪雾等天气状况以检测其识别率,不同天气环境模型如图 8 所示。
2. 4 自动化测试用例设计
针对摄像头车道偏离预警系统进行不同工况的测试,一方面要兼顾不同工况的测试与监控, 另一方面要在保证测试准确性的基础上提高测试效率。本文借助自 动化测试软件编制不同测试工况的测试流程及评价标准, 提高其测试效率。
在测试过程中,自 动化测试软件按照编制的测试用例依次调用不同试验工况的环境模型, NI 实时仿真系统中的摄像头信号及车辆状态信息也接入该软件,从而实现相关参数信息的实时监测, 并判断其是否通过测试标准要求。
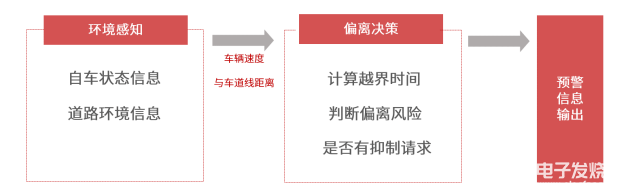
自动化测试用例设计如图 9 所示。以左弯道高速左偏离工况为例, 试验开始部分主要是加载车辆动力学模型和仿真环境模型, 并开始记录相关参数;摄像头参数设置主要是对标摄像头的安装位置及视角等参数;环境参数设置主要控制环境模型的天气、道路等状况;
然后根据摄像头输出的 CAN 报文获取摄像头 ECU 的状态信号, 判断LDW 系统是否正常激活;如果系统正常激活则进入报警信号监测, 通过 CAN 报文信号判断车道偏离时是否产生报警信号;
监测到报警信号后立即进行下一步, 读取车辆的横向偏离速度判断其是否处于规定的速度范围内, 最后终止该工况并自动进入下一工况进行测试。以此方法设计全局测试用例,涵盖基本功能逻辑试验、性能试验以及环境适应性试验,并生成所需测试报告, 实现车道偏离预警系统的自 动化测试。
03、测试结果及分析
3.1性能试验
在性能试验中,每种测试工况测试4 次,直道可重复性试验共进行 16 次,测试结果如表 3 所示。
测试中,直线低速、高速偏离工况全部正常通过,结果如图 10、11 所示, 当车轮轮距在 - 0. 1 ~0. 1 m 范围时,均可及时产生报警信号。
进行左偏离试验时重点关注左轮与左侧车道线的距离以及在规定距离范围内是否有报警信号产生, 如果有报警信号产生则要验证其横向偏离速度是否处于规定的速度区间内, 右偏离时则重点关注右轮与右侧车道线的距离,同时监测报警信号、横向偏离速度及报警时车轮距等信息。
图中纵轴为信号轴,未标明量纲, 数
值可分别用于报警信号、轮距和偏离时的横向速度, 报警信号为 0 - 1 信号, 轮距单位为 m,偏离速度单位为 m/s, 并对其取绝对值。本节其他信号图与此相同。
弯道可重复性试验共进行 32 次, 测试结果如表 4 所示。
低速左/右偏离工况均能全部通过, 未作具体分析。高速偏离工况中左弯道右偏离和右弯道左偏离时摄像头识别效果不佳,在 4 次试验中均有 1次未能及时报警,车道偏离系统测试信号如图 12、13 所示。
图 12( a) 为左弯道高速左偏离工况, 左轮距约为 0 时正常报警。图 12( b) 为左弯道高速右偏离工况,当车辆右侧偏离时车道线识别不稳定导致其未能正常报警。图 13( a) 为右弯道高速右偏离工况,在右轮距约等于 0 时正常报警。
图 13( b)为右弯道高速左偏离工况, 出现了与左弯道高速右偏离相同的情况。从摄像头实时画面来看,2 个未报警工况中车辆发生偏移时, 相对运动导致弯道车道线圆弧快速偏向车辆一侧, 识别效果较差且不稳定。
通过性能试验, 对待测摄像头在典型工况中的基本性能结果进行了验证分析。其中直道工况中,道路结构简单,车道线均可有效识别并在偏离时及时报警;弯道工况中, 车道线识别不稳定, 特别是在左弯道高速右偏离及右弯道高速左偏离两种高速反向偏离工况中, 不能及时报警, 为后期实车验证及摄像头算法优化提供依据, 提高产品开发及测试效率。
3. 2 功能逻辑试验
摄像头上下电测试时, 蓄电池电源和 LDW 系统开关处于开启状态, 车辆静止, 控制发动机点火信号的开闭来检测 LDW 系统的状态。如图 14 中虚线框所示, ( a) 中 设置发动机点 火信号为开,LDW 系统状态变为 1, 即待机状态;( b) 中设置发动机点火信号为关,LDW 系统状态变为 0, 即断开状态。测试结果表明, 摄像头上下电切换满足测试要求。
LDW 系统开关测试时信号如图 15 所示,其中( a) ( b) 工况下, 车辆均处于静止状态, 蓄电池电源和发动机点火信号处于开启 状态, LDW 系统开关信号为脉冲信号, 下降沿触发。( a) 中, LDW 系统处于关闭 状态, LDW 系 统开关未 开启, 设置LDW 系 统开关为 开启, 如 虚 线 框内 变化所示,LDW 状态变为 1,即待机状态。
( b) 中, LDW 系统处于待机状态,LDW 系统开关开启, 设置 LDW 系统开关为关闭, LDW 系 统状态变为 0, 即关闭状态。( c) 中,设置车辆速度为 65 km/h, LDW 系统状态变为 2, 即激活状态, 此时关闭 LDW 系统开关,如虚线框内变化所示, LDW 系统状态变为 0,即关闭状态。
测试结果表明, LDW 系统开关可以满足要求,控制 LDW 系统状态切换。LDW 系统激活 /退出测试结果如图 16 所示,( a) 中,当纵向车速达到 60 km/h 时, 如虚线框内变化所示, 激活状态发生突变, LDW 系统激活;
( b) 中,当纵向车速达到 55 km/h 时, 激活状态发生突变, LDW 系 统处于待机状态。测试结果表明,当车辆速度发生变化时, 虽激活状态信号有稍许延迟, 但 LDW 系 统能够自 动激活或者退出激活,满足要求。
3. 3 环境适应性试验
进行环境适应性测试时, 将测试环境复杂化,重点验证路面积水、雨雪雾等工况下摄像头的识别效果。其中, 当路面存在积水时极易导致摄像头的车道识别功能出现误判, 进而严重干扰车道偏离预警系统的正常工作。
主要表现在摄像头误把积水识别为车道, 在整个动态测试中车道线识别跳动较为严重,如图 17 所示。图 17( a) 为摄像头在环仿真存在路面积水的工况下摄像头误识别车道线的实时画面, 在整个试验过程中识别误差较大;
图 17( b) 是实车测试车道偏离预警系统时出现的虚警情况, 与仿真工况一致。在雾天环境下,摄像头仍能较好识别, 不做过多阐述;而在雨雪天气中,因为难以仿真雨雪落在摄像头镜头上的工况,所以重点关注当车速较快或雨雪较大而车辆与雨雪的相对运动导致飘落的雨雪近似成一条直线的情况, 分别设置不同的车速和雨雪量进行试验,结果表明有较小概率造成误识别, 但仍是摄像头优化时的考量因素。
结束语
基于硬件在环仿真平台对车载摄像头车道偏离预警系统进行了在环仿真测试方法研究, 针对某量产车载摄像头设计了从其基本功能逻辑到其具体性能的测试用例, 并完成了仿真测试。
在硬件在环测试中发现了其在弯道工况中高速反向偏离时容易出现车道识别丢失、虚警或者不报警的情况,特别是在存在积水的路面上行驶时, 车道线识别跳动较大,误警较多, 与实车车道偏离系统采集的数据情况一致, 如不及时优化则容易影响驾驶员驾乘判断及体验。
试验结果证明,基于硬件在环仿真平台的车道偏离预警系统仿真测试方法能够高效、安全且可重复性地完成相关测试验证, 发现存在的不足,为后期摄像头算法优化及实车试验提供参考,便于更加快速发现问题、解决问题。
在对摄像头进行更进一步的性能测试的试验中,虽然模拟出了雨雪雾天气环境, 但是无法有效模拟雨滴或雪花落在摄像头采集镜头上时的情况,故在后期研究中将重点关注该问题并寻找更加科学的解决方法, 从而提高该仿真测试方法的覆盖度、逼真度。
编辑:hfy
-
预警系统
+关注
关注
0文章
281浏览量
16318 -
adas
+关注
关注
310文章
2205浏览量
209087 -
车载摄像头
+关注
关注
5文章
138浏览量
28193
发布评论请先 登录
相关推荐
怎么设计基于FPGA的车道偏离预警系统?
基于机器视觉的车道偏离预警系统的实现
基于机器视觉的车道偏离预警系统的实现
自动驾驶推动汽车行业需求 未来单车多摄像头将成为趋势
关于车道偏离预警系统和前碰撞预警系统分析介绍和应用
摄像头在汽车上的辅助驾驶功能是如何实现的?
ADAS车道偏离检测技术






 工商网监
工商网监
评论