 PLC如何操控步进电机
PLC如何操控步进电机
plc作为一种工业操控核算机,具有模块化构造、装备活络、高速的处理速度、准确的数据处理才调、PLC对步进电机也具有超卓的操控才调,运用其高速脉冲输出功用或运动操控功用,即可结束对步进电机的操控。
关于那些在作业进程中移动间隔和速度均断定的详细设备,电工论坛小编以为选用PLC经过步进电机驱动器来操控步进电机的作业是一种志趣的技能计划。
步进电机的特征:(1)步进电机的角位移与输入脉冲数严峻成正比,电机作业一星期后没有累积过错,具有超卓的跟从性。(2)由步进电机与驱动器电路构成的开环数字操控体系,既十分简略、便宜,又十分牢靠。一同,它也能够与视点反响环节构成高功用的闭环数字操控体系。(3)步进电机的动态照料快,易于启停、正回转及变速。(4)速度可在恰当宽的计划内滑润调度,低速下仍能确保取得大转矩。(5)步进电机只能经过脉冲电源供电才调作业,它不能直接运用沟通电源和直流电源。
步进电机能照料而不失步的最高步进频率称为“主张频率”;与此相似,“接连频率”是指体系操控信号俄然关断,步进电机不冲过方针方位的最高步进频率。而电机的主张频率、接连频率和输出转矩都要和负载的翻滚惯量相习气。有了这些数据,就能有用地对步进电机进行变速操控。
选用PLC操控步进电机,应依据下式核算体系的脉冲当量、脉冲频率上限和最大脉冲数量,进而挑选PLC及其相应的功用模块。依据脉冲频率能够断定PLC高速脉冲输出时需求的频率,依据脉冲数量能够断定PLC的位宽。脉冲当量=(步进电机步距角×螺距)/(360×传动速比);脉冲频率上限=(移动速度×步进电机细分数)/脉冲当量;最大脉冲数量=(移动间隔×步进电机细分数)/脉冲当量。
PLC对步进电机的操控首要要树立坐标系,能够设为相对坐标系,也能够设为必定坐标系。坐标系的设置在DM6629字中,00—03位对应脉冲输出0,04—07位对应脉冲输出1。设置为0时,为相对坐标系;设置为1时,为必定坐标系。
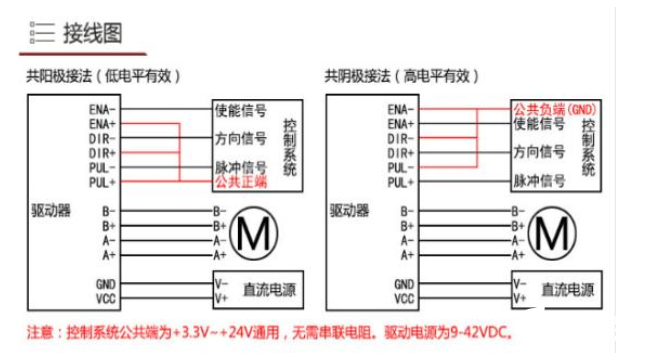
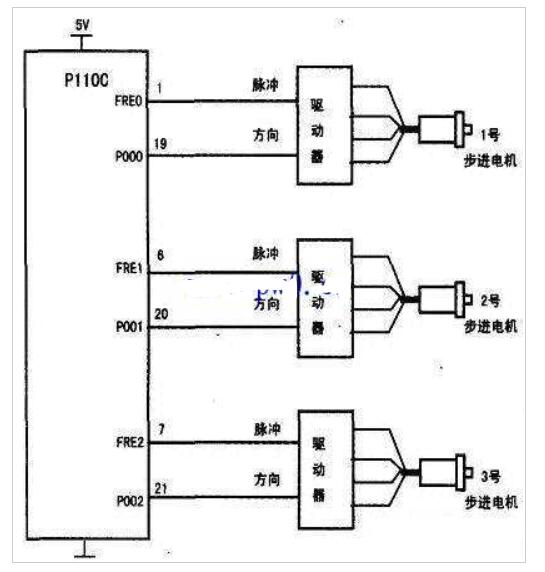
选用PLC经过步进驱动器来操控步进电机的作业,然后到达了PLC在步进电动操控中运用愈加广泛。例如,在对单双轴运动的操控进程中,在操控面板上设定移动间隔、速度和方向等参数。PLC读入这些设定值后,经过运算发作脉冲、方向信号,操控步进电动机驱动,到达对间隔、速度、方向操控的意图。并经过实测证实体系作业作用具有牢靠性、可行性、有用性。
-
plc
+关注
关注
5020文章
13406浏览量
466221 -
步进电机
+关注
关注
152文章
3122浏览量
148007
发布评论请先 登录
相关推荐
用PLC实现步进电机的直接控制
采用PLC实现对步进电机的控制(二)

PLC控制步进电机逻辑思路

plc如何控制步进电机的速度和方向?
plc如何控制步进电机的速度和方向?






 工商网监
工商网监
评论