 什么在推动机器人行业的发展?
什么在推动机器人行业的发展?
来源:搜狐
机器人不仅需要人工智能(AI)才能实现自主。他们还需要大量传感器,传感器融合以及边缘的实时推理。之前我们已经尝到了深度卷积神经网络的好处,如今来自激光雷达的更高数据处理的需求正在推动神经网络到新拓扑以获得自主。
历史上第一个机器人是在20世纪50年代末到60年代早期的时候,准确的说,它还不能称得上是一个机器人,只能算是一个“编程的物品传送装置”用于GM生产线和压铸机周围移动产品。直到今天,机器人还没有脱离原来的概念:今天的机器人是可编程的,他们需要感知自己的环境,来确保他们所做的事情和他们的计划之间的合规性,他们需要在自己的环境中移动。
那么什么推动机器人行业的发展呢?
机器人技术作为一种行业和科学,旨在通过增加嵌入式模拟智能来最大化未来机器人行为的自由。这将需要:
更多传感器用于机器人周围环境的更高精度模型。
更好的传感器与控制算法的互连(以及更分散的控制算法)。
根据控制算法的决定,更好的执行器可以更快,更准确地动作。
在今天的技术领域,机器人已经获得了很多自主权,并使用来自互补金属氧化物半导体相机传感器,激光雷达和雷达的传感器来适应各种各样的应用。虽然相机具有比雷达更大的角分辨率和动态范围,但它们无法提供激光雷达所具有的动态范围,相机也无法在烟雾或多尘的环境中工作。
由于机器人被设计为最灵活的选择,以适应最广泛的应用,它们需要在低光,多尘或明亮的环境中运行。通过组合传感器信息(即传感器融合)可以实现这种灵活性。换句话说,来自不同传感器的信息可用于重建机器人环境的弹性表示,从而在更多应用中实现自治。例如,如果短暂覆盖摄像机,则其他传感器必须能够使机器人安全地运行。为了确保机器人能够360度了解其环境,机器人传感器数据需要以时间关键的方式进行路由,并且需要少量电缆连接到机器人控制器,以最大限度地提高连接的可靠性。
对于大多数机器人而言,边缘处的推理是确保机器人能够快速响应其环境变化的关键参数,这要归功于边缘处理所允许的固有低延迟。边缘推断可以用于卷积神经网络和用于图像分类或预测维护估计的类似神经网络拓扑,用于机器人路径规划的深度Q网络,或用于解决特定类别问题的定制神经网络。
在不久的将来,传感器似乎不太可能发生太大变化,但所涉及的处理将会有所不同。成像传感器可能是高光谱的或提供更高的分辨率。激光雷达可能具有更高的波长,更安全,并提供更长的范围。雷达传感器可以提供更多的集成天线,但这些不会发生重大变化。将改变的是如何使用和汇总信息。
自主机器人的进化是一个不断变化的目标。轮子和机器人的机器人现在被认为处于自治的边缘,当人类靠近它们时具有减速的能力,并且即使在它们移动时也可以避免撞击人类。随着嵌入式模拟智能的快速变化,这些“边缘”创新型机器人将在不久的将来不被认为是自主的,因为该行业正在快速发展和生产新技术,使机器人技术比以往任何时候都更加自主。
审核编辑黄昊宇
-
机器人
+关注
关注
210文章
28086浏览量
205789
发布评论请先 登录
相关推荐
鲸启智能入选“全球及中国医疗导诊智能机器人行业头部企业调研报告”
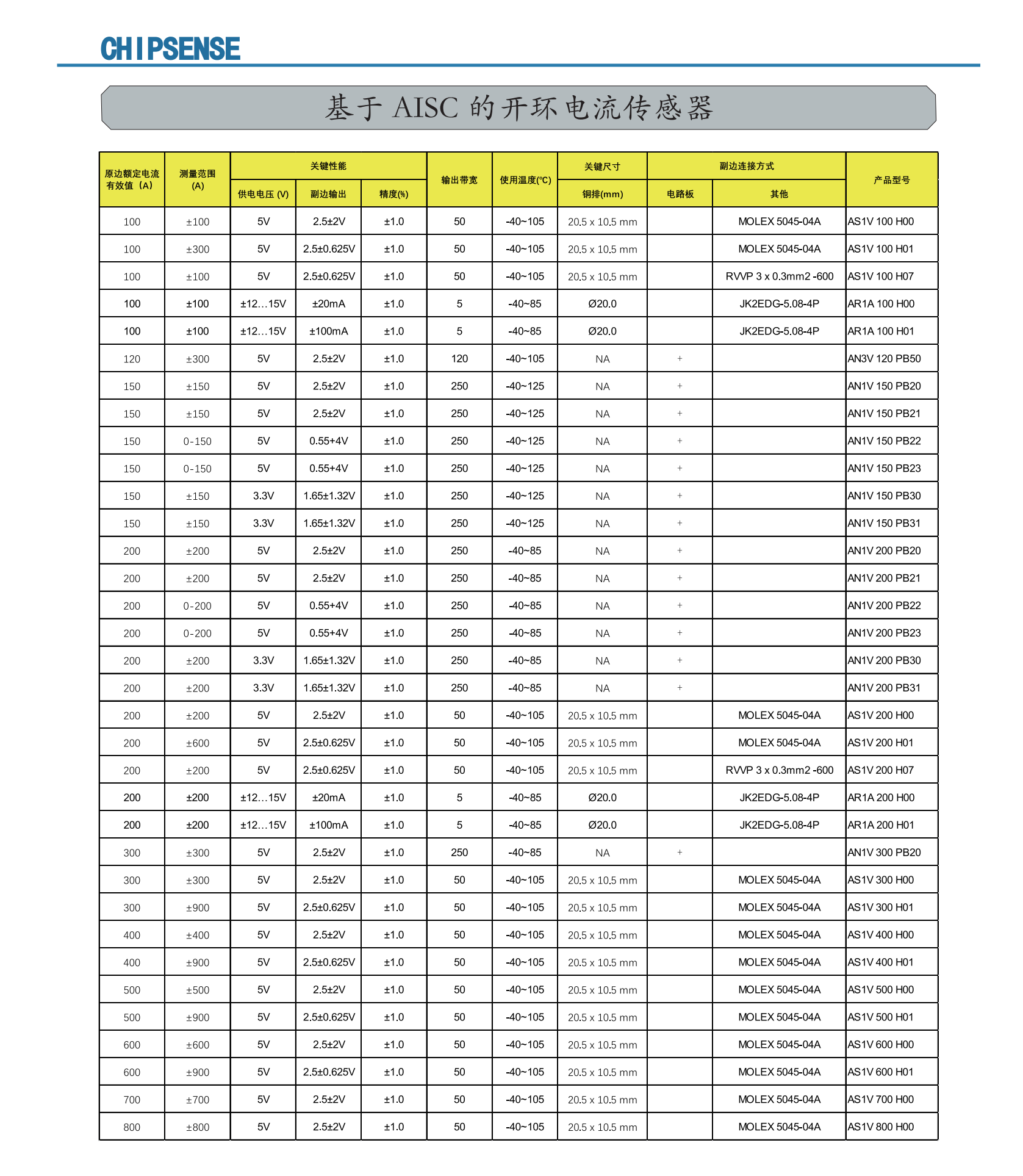
LEM国产替代:芯森传感器助力中国机器人行业蓬勃发展
智能机器人行业的进化:开发门槛大降,大模型部署高性能低功耗兼得

精益思维赋能机器人行业的三大维度
TPM革新引领:机器人行业如何迈向智能化新时代
奥比中光连获两项机器人行业殊荣
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
普渡机器人荣获“EqualOcean 2024商用机器人出海先锋Top10”称号

海默机器人荣获“中国协作机器人创新产品奖”:创新引领,智造未来

YOGO ROBOT荣膺维科杯·OFweek2023中国机器人行业年度应用创新奖

工业智能机器人以其卓越的技术和创新能力,正引领着行业的升级与变革

2023年国外移动机器人行业融资收购情况






 工商网监
工商网监
评论