 浅谈超声电机在机器人手指关节中的应用分析
浅谈超声电机在机器人手指关节中的应用分析
机器人手指一直以来都是国际公认的高难度科技项目,随着科技水平的不断进步和新兴的交叉学科不断涌现,传统的电磁电机机器人手指由于灵活性差、感知能力低下、力的控制精度不高等,已无法满足应用的迫切需要。超声电机体积小、扭力大、抗干干扰,配合上闭环控制驱动电源控制,可应用于高精度机器人手指产品。
目前国际上常见:拉钢线、舵机、无刷电机加蜗轮蜗杆结构、步进电机加蜗轮蜗杆结构、气动方案作为机器人手指方案,这些方案普遍存在噪音、精度不准、体积大、堵转烧机、断电失效等情况。超声电机作为核心驱动部件作为机器人手指关节部件,可以做到静音、高精度、体积小、堵转不烧机、断电自锁等功能。
超声电机作为核心驱动部件作为机器人手指,可使得机器人手指外观及性能更趋于完美。机器人手指主要有3个大部分组成:微型超声电机手指结构、微型超声电机驱动电源及运动算法、微型闭环控制管理。
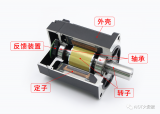
微型超声电机手指结构:以人的手指同比例进行机器人手指结构设计,将特种微型超声电机安装在特定的狭小空间,可以是中间出轴结构带齿轮,也可以中空直接驱动的结构。根据实际需求进行设置
微型超声电机驱动电源:应用于机器人手指特种微型超声电机的驱动电源体积要求尽可能小,以便于安装在极为狭小的空间,输入电压为安全电压,电源之间不要有干扰。在项目推展的未来,将会将驱动电源分为控制电源模块及功率模块进行集成电路开发,以便于在微小的空间安装多个驱动电源。
微型闭环控制管理:机器人手指微型闭环控制超声电机管理系统,驱动控制运算能力需求强,使用高于15位绝对编码器,实现精准的运动控制,使用传感器以及机器人手指运动算法实现精细化高精度的运动控制。
关键技术:
1、微型超声电机,将目前的行波型盘式超声电机进行体积整合,制作成一个体积,长度14mm*直径14mm、扭矩大于0.3Ncm、静音、堵转不烧机的指关节。
2、微型超声电机伺服驱动控制电源,将目前的行波型盘式超声电机伺服驱动控制电源进行微型化设计,制成L:15mm*W:15mm*T:8mm的多接口控制电源。
fqj
-
机器人
+关注
关注
211文章
28418浏览量
207076 -
超声波
+关注
关注
63文章
3017浏览量
138382
发布评论请先 登录
相关推荐
机器人关节的灵动之源:揭秘舵机的技术奥秘
变速齿轮在机器人中的使用
编码器在机器人技术中的应用 编码器在传感器系统中的作用
FOC电机在机器人技术中的作用
伺服电机在机器人中的应用有哪些
【开源项目】你准备好DIY一款功能强大的机器人了吗?

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!

FMEA在工业机器人故障预防中的应用
MT6701磁编码IC在关节型喷涂机器人领域中的应用
步进电机在工业机器人中的应用
泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
常见的多关节机器人有哪些?具有什么特点?

无框电机最适合哪种应用?为什么机器人关节要用无框力矩电机?





 工商网监
工商网监
评论