 协作机器人当之无愧成为机器人馆的明星
协作机器人当之无愧成为机器人馆的明星
没有力控参数的“协作机器人”
不足以称“协作机器人”
引言——伴随着2020年工博会的结束,协作机器人当之无愧的成为了机器人馆的明星,不仅占据了展馆的大部分显要位置,连传统的工业机器人厂商都纷纷效仿推出新款的协作机器人。
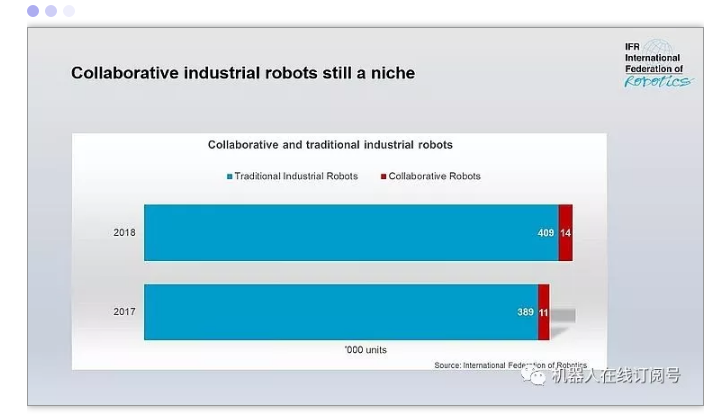
World Robotics于2019年分析了协作机器人(cobots)的市场,尽管协作机器人(cobots)引起了各大媒体的强烈关注,虽然其安装的单位数量对比传统机器人仍然非常低,仅占3.24%,不过从增长率看,协作机器人的浪潮已悄然开始,从17年到18年,其增长率高达23%,国内协作机器人在媒体端俨然成为制造业宠儿。
很多媒体喜欢用“弯道超车”这个词,貌似国内在传统机器人落后了就能凭借协作机器人打个翻身仗?中国庞大的机器人市场如果作为赛道,需要的是观众们理性科学的认知及核心竞争力产品的出现方能开启赛跑模式。协作机器人本是工业机器人的一个细分产品,且其概念较模糊,应用场景语焉不详,市场吹捧和资本青睐会将协作机器人带向何处,对此作为机器人行业人的笔者深感焦虑。
协作机器人具有与人一起工作的属性,从这个属性出发我们大概能推演出协作机器人的三大特点:安全,轻量,人机友好,笔者对协作机器人最为担心的是最关键且争议最大的“安全”问题。
为了让机器人更安全,协作机器人厂家通过不同的技术方式来检测外部碰撞或规避与人接触。
1,其中最典型的一种技术方式是通过检测电流电压的变化来判断外部是否发生碰撞,这种方案的优点是结构简单,对控制和硬件要求较低,而它的缺点则是碰撞敏感度低,在安全和柔性上仍存很大问题。因此,在实际生产使用中与人协作并能保证完全安全的概率几乎为零。
这类协作机器人的应用场景绝大多数也是替代了原本小负载工业机器人的应用场景,本质上是行协作之名,做小六轴之事。
2,第二种是增加外部力传感器,分末端增加六维力传感器,每个关节均增加一维传感器,底座增加传感器三类,其中末端增加六维传感器并不能保证在机器人本体处的安全(如三四轴夹到手)所以其并不具有协作属性,因此将此排除在外。
底部增加传感器的这种方式由于算法复杂,干扰多,在协作机器人中普及并不广。最接近协作概念的应该是每个关节都有力矩传感器并且其力控制或外部敏感度达到一定的指标。
以Franka为例,官方数据显示其力分辨率<0.05N;力矩分辨率<0.02Nm;示教牵引力约2N;碰撞反应时间<2ms; 用这些力控参数反向来证明其人机交互的可靠性。
3,第三种是在机器人外围增加区域光栅或,其他检测设备,当人进入机器人工作区域时,机器人降速或停止,这种方案往往是的一种技术路线的弥补,本身与“协作”的定义背道而驰、不予讨论。
但纵使Franka Emika可以官宣出其他协作机器人厂家讳莫如深的力控参数,是否就能证明他的机器人安全且协作的呢?
答案是否定的!
我们知道机器人本身是一个多轴串联的移动机构,真正使用的时候还必须配套相应的末端执行工具,而末端工具是否安全才能决定机器人本体是否能发挥出协作性能。
有些协作机器人厂家在协作机器人末端增加气动夹爪,真空吸盘,焊枪等执行工具,这无疑让整个机器人系统的安全性消失殆尽,再去强调机器人的协作性无异于掩耳盗铃。
为了解决这个问题Fanrka通过标配夹爪且将夹持力限制在140N以内方案来达到末端的安全性。但纵使这样也很难保证其绝对的安全,在有些场景机器人需要抓取一些硬物,尖锐物,触碰到人体某些敏感部位如眼球,太阳穴依然能造成很大的伤害。
通过以上的分析,协作的安全定义根本无法自圆其说,笔者认真查阅了协作机器人标准(ISO/TS 15066;2016)里面甚至列出了人体每个部位能承受的最大压力,用以限制机器人性能,这无疑是一个画地为牢,固步自封的可笑操作,同样的规范,老年病人的生物承受限度是远低于青壮人的,被机器人碰撞到的人体各部位的硬度和体重及约束条件也各有不同。如对一个有严重骨质松的老年人,目前iso建议的碰撞力将有可能产生骨折。所以世界上没有任何设备能保证其绝对的安全!
机床需要人工上下料,也算是“协作”了,但他安全吗?汽车算是最直接的人机交互设备,但他安全吗?人拿着电动螺丝刀拧螺丝,螺丝刀安全吗?所以机器人安全本身就是一个非常矛盾可笑的概念,据笔者的好友反馈欧洲已经不再提“协作机器人”这个概念,但是机器人的力控制确实是个机器人发展的方向这使得机器人多了一个感知维度,相机让机器人有了眼睛,力控让机器人有了触觉。没有力控制参数的机器人不足以称“协作机器人“。因此规范力控参数,放弃“协作”概念,才是协作机器人发展的正解。
在2020工博会上Franka Emika的卫卜源先生重新定义并梳理了Franka Emika机器人的 技术优势,市场策略,强化了力控技术参数在机器人上的重要意义。首次以“力控机器人”的概念强化了市场的认知。倡导大家丢弃夸大的说辞,专注科学的精度。
原文标题:Franka Emika 卫卜源:放弃“协作”概念,规范力控参数
文章出处:【微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
211文章
28405浏览量
207020 -
协作机器人
+关注
关注
2文章
489浏览量
30135
原文标题:Franka Emika 卫卜源:放弃“协作”概念,规范力控参数
文章出处:【微信号:im_robotic,微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
MiR推出MC600移动协作机器人
协作机器人要实现0.03mm路径精度有多难
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃
Al大模型机器人
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
工业4.0中的机器人向协作机器人演进
海默机器人荣获“中国协作机器人创新产品奖”:创新引领,智造未来

PCB行业:用协作机器人,就选大族机器人
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
什么是协作机器人?为什么使用协作机器人?





 工商网监
工商网监
评论