 机器人螺柱焊程序号选不上怎么怎么解决?
机器人螺柱焊程序号选不上怎么怎么解决?
昨天厂家给我出了一个问题,机器人使用第2把焊枪工作时一倒退程序螺柱焊就无程序号.
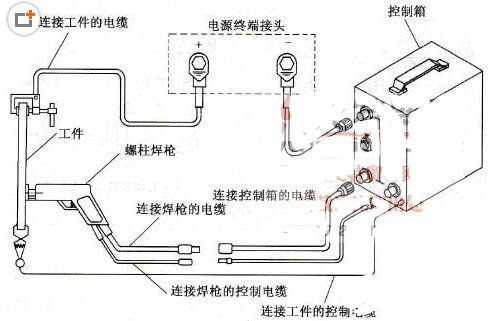
设备状态描述:一个机器人带一个螺柱焊机箱,使用两个枪头.

程序结构是这样的,采用大众奥迪标准USE程序调用程序号
对USER程序进行分析:
USER_S9_Teil_2_Bolzen-St Nr1 ProgNr=1 BolzenNr=1 EIN ;%{SE}%MKUKATPVW %CVW_SPS %VUSER %P 2:USER_S9_Teil_2.Bolzen-St P1= 1 P2= 1 P3= 1 P4= 1 P5= 1 P6= 1 P7=EIN P8=202,3:USER
;ENDFOLD
VW_USR_R (#USR_ADV,202,1,1,1,1,1,1,TRUE)
P1 : 1/2号螺柱焊机箱设备
P2: 发出的程序号
P6: PLC进程号用于比较焊点是否重复:
P7: 激活USER
CASE 1 ; 第1台螺柱焊号
CONTINUE
S_Pkt_Nr=PAR6 发出PLC进程号
CONTINUE
Prog_Nr_Bolzen1=PAR2 ;发出螺柱焊程序号
SIGNAL Prog_Nr_Bolzen1 $OUT[385] TO $OUT[391]
CONTINUE
$B_OUT[7]=PAR2 发出进程号
IF(PAR6==$COUNT_I[20])THEN
MLD (25); 提示:螺柱已经焊接
ENDIF
CASE 2 ; 第2台螺柱焊号
CONTINUE
S_Pkt_Nr=PAR6 发出PLC进程号
CONTINUE
Prog_Nr_Bolzen2=PAR2 ; 发出螺柱焊程序号
SIGNAL Prog_Nr_Bolzen2 $OUT[761] TO $OUT[767]
CONTINUE
$B_OUT[6]=PAR2
IF(PAR6==$COUNT_I[20])THEN 比较记录用的点号
MLD(25); 提示:螺柱已经焊接
ENDIF
故障分析:
当机器人使用第二把枪时应该使用的user 形式为:
USER_S9_Teil_2_Bolzen-St Nr1 ProgNr=2 BolzenNr=2 EIN
或者是: USER_S9_Teil_2_Bolzen-St Nr1 ProgNr=2 BolzenNr=3EIN
而不应该是USER_S9_Teil_2_Bolzen-St Nr2 ProgNr=1 BolzenNr=1 EIN
因为P2值=2是指使用第二个螺柱焊机,而机器人只组态了一个螺柱焊机.
当人员使用行选择,或者后退程序时,使用的第一把枪的程序号被关闭不被保存因此,第二把枪的程序就没有了.
所解决此故障只需改变USER值即可
;FOLDPTP VB=100% VE=0% ACC=100% Wzg=4 SPSTrig=5[1/100s] P ;%{P}%MKUKATPVW,%CMOVE,%VPTP,%P 1:1, 2: VB=, 3:100, 4:%, 5: VE=, 6:0, 7:%, 8: ACC=, 9:100, 10:%, 11: Wzg=, 12:4, 13: SPSTrig=, 14:5, 15:[1/100s], 16: P, 17:22, 18:-1, 19:23
;FOLD1: FB PSPS = EIN ;%{SE}%MKUKATPVW %CVW_SPS %VFBPSPS %P 2:FB PSPS = EIN,3:FBPSPS
;ENDFOLD
;FOLD2: A852 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A852 = AUS,3:BOASG
;ENDFOLD
;FOLD3: -- -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- --,3:VW_COMMENT
;ENDFOLD
;FOLD4: WARTE BIS !E848 & E852 ;%{SE}%MKUKATPVW %CVW_SPS %VWBOASG %P 2:WARTE BIS !E848 & E852,3:WBOASG
;ENDFOLD
;FOLD5: USER_S9_Teil_2_Bolzen-St Nr1 ProgNr=2 BolzenNr=2 EIN ;%{SE}%MKUKATPVW %CVW_SPS %VUSER %P 2:USER_S9_Teil_2.Bolzen-St P1= 2 P2= 2 P3= 1 P4= 1 P5= 1 P6= 2 P7=EIN P8=202,3:USER
;ENDFOLD
;FOLD6: SPSMAKRO151 = !E856 ;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO151 = !E856,3:MAKRO
;ENDFOLD
-
机器人
+关注
关注
212文章
28882浏览量
209504
原文标题:关于解决螺柱焊程序号选不上问题
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论