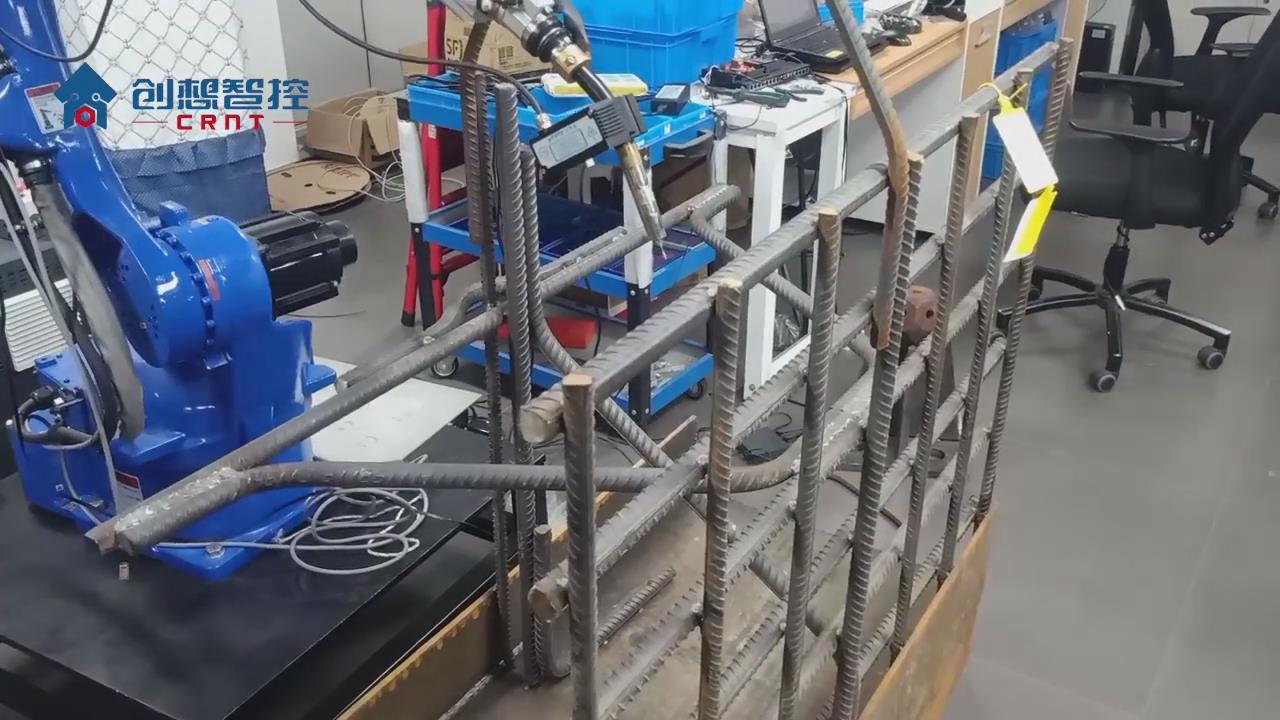
 机器人曲线焊缝的操作流程
机器人曲线焊缝的操作流程
在大型铝合金航天器结构中,存在大量复杂形式的焊缝,如球形、圆柱形、圆台壳体与圆形、异形法兰形成的相贯线等。载人飞船、目标飞行器、军用卫星、月球探测飞行器等舱体结构都不同程度地涉及到这类形式焊缝的焊接问题。目前大多靠手工钨极氩弧焊来完成这类曲线焊缝的焊接。存在如下问题:
①反复补焊影响产品研制进度。手工焊容易出现缺陷,排除缺陷和补焊的效率往往牵制结构的研制进度;
②热输入量大,焊接残余应力水平高,容易导致产品尺寸超差;
③新一代长期在轨航天器密封舱体要求在轨寿命十五年以上。手工钨极氩弧焊工艺焊接热输入量大,焊缝显微组织粗大,焊缝残余应力较大,应力腐蚀倾向严重,该工艺已不适应航天器结构长寿命、高可靠的制造需求。
激光跟踪传感器具有信号处理快速准确的动态响应,所以提高了检测灵敏度,改善了焊缝跟踪的精度,且可以提高焊接速度,使焊道平滑等。
焊接机器人研究中的一项难题。其中关键技术包括:焊缝点图像采集、结构光数学模型建模、机器人的运动控制算法、视觉伺服控制、焊接机器人位姿实时调整、初始焊缝位置识别与定位。通过视觉伺服控制技术组建一个控制系统,实现曲线焊缝的自主识别定位,并完成焊缝的自动跟踪。
目前对于焊接机器人对曲线焊缝自动跟踪的研究,都是在设定视觉传感器可以获取稳定的信息情况下进行的,对如何保证图像特征始终存在于摄像机的有效范围内、如何快速的调整焊枪姿态与如何协调跟踪过程中的三个任务考虑较少。线结构光激光测量技术以其测量速度快、精度高、模型简单、稳定性好等优点,广泛应用于工业测量中的三维信息获取,是目前实现机器人路径识别与轨迹规划较为成熟的一项技术。
具体的操作流程如下:
(1)初始点定位:粗扫描阶段,提高机器人速度,减少图像采集点频率,直到焊缝点扫描消失,然后回到上一点;细扫描阶段,降低机器人速度,提高图像采集频率,直到找到最后一个点,即为比较精确的焊缝初始点;
(2)初始位姿调整:根据位姿调整策略调整焊缝初始点位姿,得到焊接机器人理想姿态R6;
(3)焊缝点三维信息计算:计算确定在当前姿态R6下达到焊缝初始点机器人位置信息P1;
(4)延迟跟踪:将结构光采集到的数据保存到建立的队列当中,如果要提高系统精度,可以适当增加队列长度。读取当前焊枪末端点三维信息Pn,在P1~Pn之间适当插值,存于队列中;
(5)根据当前焊缝图像,图像处理获取焊缝点,将焊缝点在摄像机坐标系的三维坐标变换到机器人基坐标系后入队,若焊缝提取失败则跳到(8);
(6)伺服控制:将焊接机器人运动分解为旋转部分和平移部分的策略。平移运动保证焊枪精度,旋转保证焊接机器人姿态良好;用视觉伺服控制反馈视觉图像,结合焊枪坐标系建模方法,获得机器人的旋转量,实时调整机器人位姿。
(7)位姿调整:根据结构光数学模型把采集到的焊缝点图像坐标转换为三维信息,然后根据视觉伺服控制方法控制焊接机器人进行焊缝跟踪,在跟踪过程中实时进行机器人位姿调整,保证焊枪与工件法线成15度;保证在曲线焊缝视觉跟踪过程中焊缝点的图像坐标在期望图像坐标的可接受范围内,确保焊缝方向与激光条所成角度接近90度。
(8)判断保存焊缝点三维信息的队列是否为空,如不为空则跳到(4),反之则跳到(9);
(9)焊缝跟踪任务结束。
可创新点:
(1)初始点定位自动化程度:对于焊缝初始点自动识别定位,应当提出更加简便和快捷的方法,使自动识别效果更好,自动化程度更高;
(2)焊缝跟踪路径规划:获取焊缝点三维信息后,应当对焊缝点进行轨迹规划来使跟踪轨迹更加平滑,提高焊缝质量。
责任编辑人:CC
-
机器人
+关注
关注
211文章
28468浏览量
207373 -
焊缝
+关注
关注
1文章
98浏览量
12993
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
如何避免焊接机器人焊缝偏移

创想智控激光焊缝跟踪系统协同松下机器人自动焊接高机贴板的应用
焊接机器人示教模式怎么设置

焊接机器人焊缝寻位跟踪系统的作用
Al大模型机器人
工业机器人任务编程基本流程
abb工业机器人的操作流程和注意事项
基于鸿道(Intewell®)操作系统研发的农业机器人操作系统

创想激光焊缝跟踪系统携手新松机器人 实现钢结构自动化焊接

高效、安全、智能:机器人如何重塑行业内部物流上下料流程?

创想焊缝跟踪系统适配藦卡机器人进行自动化焊接的应用





 工商网监
工商网监
评论