 自动驾驶车辆面对碰撞时如何将损失降到最低?
自动驾驶车辆面对碰撞时如何将损失降到最低?
百度董事长兼首席执行官李彦宏在百度世界大会2020上预测自动驾驶5年后全面商用,拥堵大大缓解、不再需要限购限行。
他表示,当无人驾驶逐渐普及,交通事故发生率也会大大降低。通过测算,以车路协同为基础的智能交通基础设施建设,将能够提升15%-30%的通行效率,从而为GDP贡献2.4%-4.8%的绝对增长。
在自动驾驶技术中,运动规划和控制是关键操作,自动驾驶的目标是在遵循交通规则的情况下规划和导航从起始位置到目的位置的道路,并尽可能地避免任何碰撞。
车辆的碰撞往往会造成非常严重的事故,不仅危害驾驶人员安全,同时对于其他人或者车辆也都存在潜在的危险,那么对于自动驾驶车辆,该如何在面对不可避免的碰撞时做出正确的反应,来将损失降到最低呢?
百度在18年3月8日申请了一项名为“基于碰撞后分析的自动驾驶车辆的车辆动作优化”的发明专利(申请号:201880002895.9),申请人为百度时代网络技术(北京)有限公司。
根据该专利目前公开的资料,让我们一起来看看这项发生碰撞时紧急避险的技术吧。
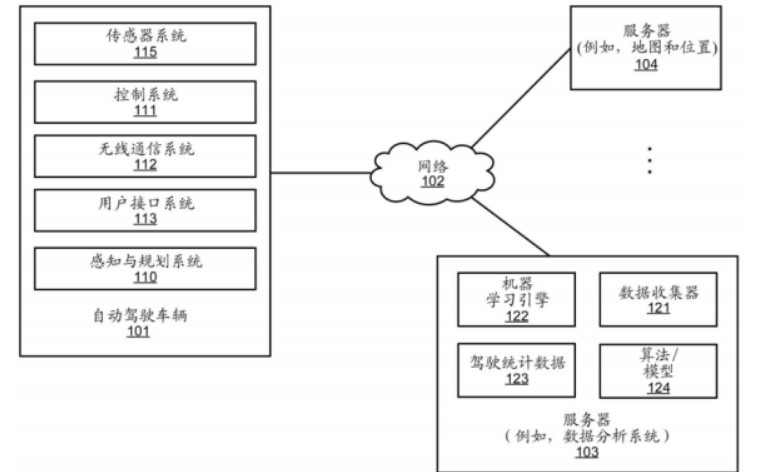
如上图,为该专利发明的网络化系统框图,网络配置100包括通过网络102通信的自动驾驶车辆101,车辆上分布有用于自动驾驶所必须的模块,如:感知与规划系统110、车辆控制系统111、无线通信系统112、用户接口系统113、资讯娱乐系统114和传感器系统115。
和其他方案不同的是,该专利将自动驾驶车辆上的各个功能按照模块进行划分,从功能抽象层次来进行设计。而自动驾驶车辆通过网络与机器学习服务器以及地图服务器等相连,在机器学习服务器中,可以对于车辆传递回来的信息进行检测和识别,例如:路况识别、交通标志识别、车道线识别等。
而为了能够在发生碰撞时做出紧急反应,就更加依靠车辆周围环境的情况采集,通过传感器系统以及感知与规划系统、结合地图服务器反馈的信息等做出正确的反应,从而将碰撞后的损失降到最低。
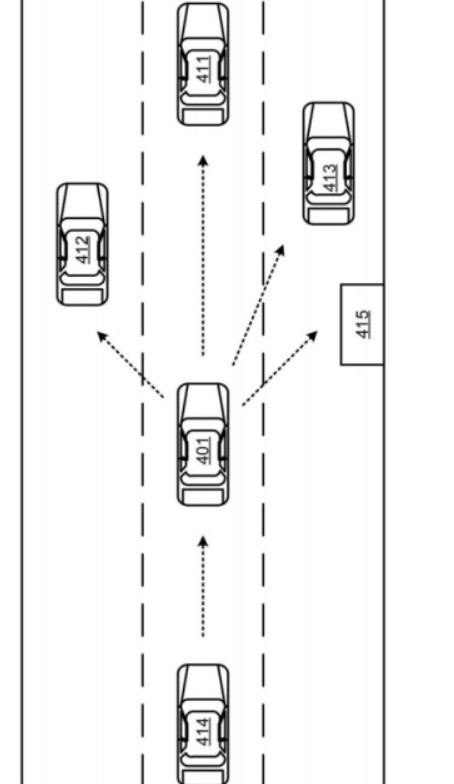
如上图,是一个特定驾驶环境的示意图,可以看到,无人驾驶车辆401被其余411-415四辆车所包围,因此无人驾驶车辆的规划模块可以基于由感知模块提供的驾驶环境的感知信息和由预测模块提供的对象的行为预测来确定是否无法避免与其他车辆发生碰撞。
例如,无人驾驶车辆的速度与前方车辆之间的速度过大而距离过小而无法及时刹车时,系统就会向无人驾驶车辆发出最大制动命令,这样由可能可以避免发生碰撞。但是,当道路情况变得复杂时,这种简单的策略往往会失效,因为当与前车距离过小而紧急制动时,有可能会与后面的车辆发生碰撞。
因此,假设系统中的碰撞是不可避免时,让无人驾驶车辆智能的选择最小损失的方案进行碰撞才是明智的选择。例如当无人驾驶车辆要与前车相撞时,假设左侧为人群,右侧为垃圾桶,则无人驾驶车辆向右急转撞向垃圾桶才会不会对行人造成伤害以及减少损失。
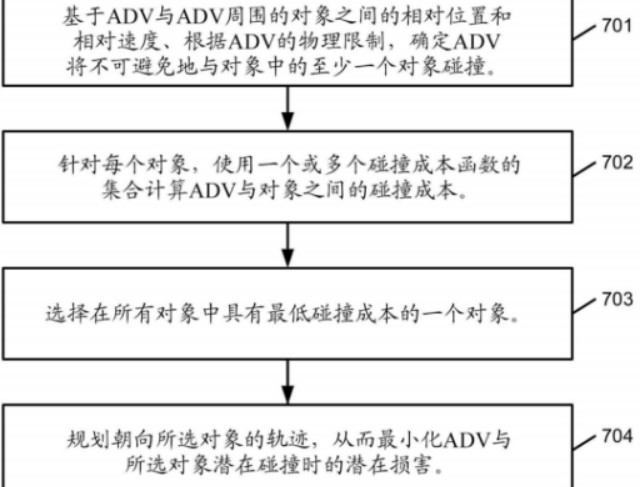
如上图,为该专利发明的自动驾驶车辆的过程流程图,首先,无人驾驶汽车会基于自身以及周围对象之间的相对位置和相对速度,根据计算来确定是否会发生不可避免碰撞的情形。此时,就需要进行更加详细的计算,既然碰撞无法避免,那么与每个对象的碰撞成本约为多少,该如何选择碰撞对象就成为下一步的任务。
在对周围对象进行碰撞成本估计后,无人驾驶车辆就会选择碰撞成本最低的一个对象,这样不仅对于车主,对于周围的行人以及其他车辆来说,只要确保成本计算方法是合理的,就可以将损失降低到最小。
以上就是百度发明的当不可避免的碰撞发生时车辆的应对方案,基于车辆对于周围环境的分析以及对于可能碰撞对象损失的估计,从而找到一个最优的碰撞方案。不得不说,这样的系统确实可以作为保证人们利益的最后一道保护屏障,倘若五年后无人驾驶车辆真的有了大规模的应用,相信这样的技术肯定会非常实用。
关于嘉德
深圳市嘉德知识产权服务有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
责任编辑:tzh
-
网络
+关注
关注
14文章
7555浏览量
88733 -
无人驾驶
+关注
关注
98文章
4054浏览量
120451 -
自动驾驶
+关注
关注
784文章
13786浏览量
166399
发布评论请先 登录
相关推荐
一文聊聊自动驾驶测试技术的挑战与创新

使用STT全面提升自动驾驶中的多目标跟踪

聊聊自动驾驶离不开的感知硬件
车厂如何安全有效做自动驾驶路测?

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
自动驾驶识别技术有哪些
自动驾驶的传感器技术介绍
自动驾驶汽车传感器有哪些
未来已来,多传感器融合感知是自动驾驶破局的关键
自动驾驶发展问题及解决方案浅析
Waymo自愿召回444辆自动驾驶汽车 L4的自动驾驶还有很多路要走







 工商网监
工商网监
评论