 MathWorks Simulink Real-Time 重要更新:增强快速控制原型和硬件在环测试能力
MathWorks Simulink Real-Time 重要更新:增强快速控制原型和硬件在环测试能力
中国北京,2020 年10月16日—— MathWorks公司今日发布 Simulink Real-Time 重要更新,可在基于模型的设计中增强快速控制原型和硬件在环 (HIL) 测试能力。从版本 2020b 开始,Simulink Real-Time 支持 QNX Neutrino RTOS---一款来自 BlackBerry、兼容 POSIX 的 64 位多进程实时操作系统,QNX RTOS 广泛应用于车辆、医疗设备、工业控制、铁路、机器人及航空航天和国防等领域的生命与安全关键型系统。
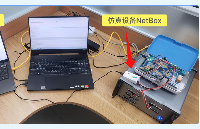
此次更新以现有的 Simulink Real-Time 与 Speedgoat 集成为基础。现在,工程师可以借助 I/O 驱动器模块扩展 Simulink 模型、自动构建实时应用、创建仪表,以及在目标计算机上执行交互式或自动化运行。工程师可以用虚拟系统的实时仿真取代车辆、飞机或机器人等物理系统,从而降低测试成本。QNX Neutrino RTOS 带来了新的工作流程,能够更容易地求解实时计算问题,尤其在多项任务竞争系统资源的情况下表现出显著优势。
BlackBerry QNX 产品与战略副总裁 Grant Courville 表示:“众所周知,MathWorks 一直在为工程师和科学家提供卓越支持,而后者正不断寻求新方法,力图通过仿真和测试来改进设计。QNX 是任务关键型嵌入式系统的首选 RTOS;同时,来自各行各业的众多工程师都借助 MathWorks 的 Simulink Real-Time 实施仿真和基于模型的设计。二者集成后,团队不仅可以在各自的首选环境下工作,还能在从设计到部署的整个过程中充分利用 QNX Neutrino RTOS 带来的种种优势。”
MathWorks 验证产品经理 Jay Abraham 表示:“面对复杂的嵌入式系统,工程师不断探索各种方法,希望在基于模型的设计中改进实时仿真和测试。现在,随着 QNX Neutrino RTOS 实现兼容,工程师可以运用 Simulink Real-Time 应对设计难题,实现更为精简的快速控制原型和 HIL 测试。”
用户可下载 Simulink Real-Time 目标支持包,其中包含各种开发工具和运行时组件(免费附赠交叉编译器),可以编译和运行实时应用。
此外,Simulink Real-Time 现在还提供:
·新的 Simulink 实时资源管理器,以及图形化仪表面板和应用程序:使用新的 Simulink 实时资源管理器,控制和配置实时应用;使用 App 设计工具,创建图形化仪表面板和自定义应用程序
·测试工程工作流支持:只需使用 MATLAB 和 Simulink Real-Time,即可开发与实时应用交互的测试和标定 App 和脚本
·Simulink Real-Time 升级顾问:自动升级在之前版本中创建的模型,以利用新的 64 位 RTOS
·全新 File Log 模块:可以在实时执行过程中启用和禁用记录、在与 MATLAB 断开连接的情况下记录多个运行,并将记录的数据导入 MATLAB
-
驱动器
+关注
关注
52文章
8232浏览量
146280 -
MathWorks
+关注
关注
16文章
75浏览量
61208 -
实时操作系统
+关注
关注
1文章
197浏览量
30754
发布评论请先 登录
相关推荐
Simulink自定义模块开发教程 Simulink 在控制系统中的应用
PanoSim加入MathWorks Connections计划
快速部署原型验证:从子卡到调试的全方位优化

新的 MathWorks 硬件支持包支持从 MATLAB 和 Simulink 模型到高通 Hexagon 神经处理单元架构的自动化代码生成
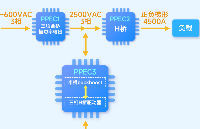
EasyGo实时仿真丨PCS储能变流器控制仿真应用
【干货分享】硬件在环仿真(HiL)测试

EasyGo使用笔记丨分布式光伏集群并网控制硬件在环仿真应用
EasyGo使用笔记丨分布式光伏集群并网控制硬件在环仿真应用
EasyGo实时仿真丨飞轮储能系统硬件在环仿真测试
protues出现Real Time Simulation failed to start.
硬件测试服务项目的重要性和作用


恩智浦Real-time Edge v2.7正式发布!







 工商网监
工商网监
评论