 基于MSP430单片机和GPS技术实现物流跟踪系统的设计方案
基于MSP430单片机和GPS技术实现物流跟踪系统的设计方案
作者:陈著明;邱小华;覃建波
引言
现代物流是国民经济的基础之一,已被认为是企业在降低物质消耗、提高劳动生产率之外创造利润的第三重要源泉,极大地降低了生产成本。但是目前物流运输的营运水平普遍不高,给工商制造企业的发展带来了很大不便,产品脱销、订单流失、货物失窃等事件时常发生。针对目前物流的需要和现有的科学技术,本文提出了一种基于MSP430单片机的物流跟踪系统设计的新方法。运用GPS模块对货物进行实时定位跟踪,然后用强跟踪卡尔曼滤波算法对GPS采集到的数据进行滤波;滤波后的数据信息再通过GSM模块和AT命令,以短信息的形式发送到监控中心;监控中心的计算机对GPS数据信息和电子地图进行匹配,从而达到对货物进行实时定位监控的目的。同时,在货物终端液晶可以实时显示定位信息和从监控中心发来的短信息。
1 物流跟踪系统的结构及硬件设计
1.1 物流跟踪系统的结构
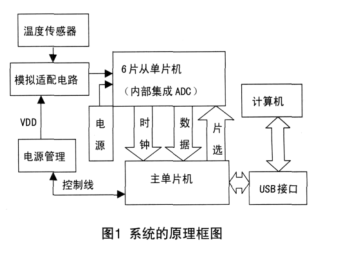
物流跟踪系统首先要根据跟踪覆盖范围、实时性、刷新速度和定位精度等要求,选择合适的GPS接收机、GSM模块和微处理器,并开发相关的应用软件。图1给出了简单的物流跟踪系统结构图。
从图1中可以看出,系统主要由3部分组成。
①货物信息处理终端:包括中央处理器、GPS接收机、GSM模块、显示模块、控制电路。主要实现对GPS定位数据的接收与分类处理,对监控中心命令的接收与解析,向监控中心发送定位信息,以及遇险报警和实时显示定位数据等功能。
②GSM数字蜂窝移动通信网:包括GSM网络、基站等。主要实现基站与移动目标的信息交换,以及GSM网络与监控中心的信息交换。
③监控中心:包括数据库、地理信息系统终端、业务处理终端。主要实现卫星定位信息在监控中心计算机的GIS电子地图上的实时显示。
1.2 物流跟踪系统的硬件设计
物流跟踪系统的硬件电路示意图如图2所示。本系统选用的中央处理器是美国德州仪器(TI)公司开发的 MsP430F147单片机。该系列单片机具有电源电压低(1.8~3.6 V)、功耗低等优点,适用于手持设备或电池应用等场合。GPS接收机选用STDll_GPS_M0dule模块,通过MAX232电平转换芯片与单片机的 URXDl相连,以达到定位数据信息送到单片机处理的目的。GSM通信模块采用西门子公司生产的TC35i,TC35i模块的GSM_RX和GSM_TX 分别与单片机的URXDO和UTXDO连接,实现单片机与TC35i通信;TC35i的SIM卡接口电路与SIM卡座相连。液晶模块TGl2864实现货物终端的显示功能。
2 卡尔曼滤波算法及其改进
2.1 卡尔曼滤波算法
卡尔曼滤波算法是以最小均方误差为估计值的最佳准则,来寻求一套递推估计的算法。其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。动态GPS测量中,用卡尔曼滤波算法从受扰动的数据中估计状态变量,能快速、准确地算出三维坐标。非差相位精密动态单点定位的卡尔曼滤波模型:

统计特征为:E(Uk)=O,E(Nk)=O,动态噪声向量Uk、观测噪声向量Wk、动态噪声向量和观测向量都是期望值为0的白噪声向量,cov(Uk,Uj)=Qkδkj,cos(Nk,Nj)=Rkδkj,cos(Uk,Nj)=O。
其中:Xk和Yk分别是k时刻的状态矢量和观测矢量;Fk/k-1为状态转移矩阵;Uk为k时刻动态噪声;Tk/k-1为系统控制矩阵;Hk为k时刻观测矩阵;Nk为k时刻观测噪声;Qk、Rk分别是系统动态噪声和观测噪声的方差矩阵。δkj为克罗内克函数,即:
![]()
简便起见,先考虑整周模糊度为常数时的矩阵向量,动态模型采用常速模型。
理想条件下,卡尔曼滤波是线性无偏最小方差估计。在实际应用中,由于滤波的状态估计值可能存在偏移,且估计误差的方差也可能很大,远远超出了按计算公式计算的方差所定出的范围,这在滤波理论中称为滤波的“发散现象”。当滤波发散时,就完全失去了滤波的最优作用,在实际中必须抑制发散现象。
2.2 强跟踪卡尔曼滤波算法
为保证滤波器可靠收敛,考虑通过牺牲一定的精度换取滤波稳定性——例如增大系统的过程噪声和观测噪声的方差阵——这样就将许多未建模的误差包含进去,使算法变得简单可靠。参考文献中提出的强跟踪卡尔曼滤波算法就是依据这种思想,将状态估计误差的协方差阵乘以加权系数λk+1,如式(7)所示。这种方法具有很强的突变状态跟踪能力,并在滤波器达到稳态时保持这种能力,对初值和噪声统计特性的敏感性也比较低。
式(9)和式(10)中的αi值是由先验知识来确定的。可以看出,当状态发生突变时,估计误差Yk+1YTk+1的增大将引起误差方差阵v0(k+1)增大;相应地,加权系数λi(k+1)增大,滤波器的跟踪能力增强,可靠性提高。但是这种方法的缺点是破坏了滤波器的最优条件,使滤波结果产生一定幅度的波动。运用上节的粒子运动模型,通过仿真分析强跟踪卡尔曼滤波算法。在仿真的过程中,突然将系统和观测噪声改变,对比两种算法对噪声改变的适应性。

由图3和图4可知,常规卡尔曼滤波算法对噪声突变的应付能力比较弱,特别是噪声模型和仿真时的固定模型相差较大时,滤波就出现了发散现象;强跟踪卡尔曼滤波算法能适应滤波过程中的噪声变化,但是降低了滤波精度。
3 物流跟踪终端的软件设计
3.1 系统主程序设计
系统主程序主要是实现系统的初始化,短信息的接收、删除和发送等功能。初始化包括单片机各端口的配置、中断设置、计数器初值设置、液晶初始化、GSM模块初始化、串口的初始化设置等。串口发送程序包括发送短信息头文件(GSM模块格式选择,设置短信息目标号码),以及等待TC35i模块的响应(当响应为 “》”时,继续发送具体的内容数据。如果有结果返回,则短信息发送成功;反之,则重新开始)。对于短信息接收主要包括3个步骤:首先发送读取短信息的命令;然后GSM模块返回响应;最后对响应进行解析得到短信息的内容。接收到短信息后,显示该短信息的内容,并删除GSM模块中的短信息。主程序流程如图5所示。
3.2 采集中断服务程序设计
系统GPS数据采集中断服务程序子程序流程如图6所示。实现的功能是采集GPS模块数据信息,对所得的数据信息进行处理,再用强跟踪卡尔曼滤波算法滤波,并发送到液晶显示模块和GSM模块。
4 试验结果
为了验证强卡尔曼滤波算法在GPS定位中的作用,对使用强跟踪卡尔曼滤波和未使用滤波算法的GPS定位进行定点测试对比。从图7和图8中明显可以看出,使用强跟踪卡尔曼滤波算法可以有效地抑制卫星定位漂移,提高卫星定位精度。
结语
为了满足目前贵重物品运输的需要,设计开发了以MSP430F147为控制核心、GPS模块和GSM模块为控制对象的物流跟踪系统。本系统采用 MSP430单片机设计,体积小、功耗低,接口友好;采用了强跟踪卡尔曼滤波算法对GPS数据信息滤波,大大提高了定位精度。同时,本装置可用于不同的监控中心,监控中心只要能接收短消息,就可以确定物品的具体位置,方便实用。经过反复测试,在没有障碍物的地方,GPS定位精度高和短信息接收发送实时性好。为了满足市场不断变化的需求,还需要进一步提高在错综复杂的地理环境下的定位精度,这是后续阶段需要研究的方向。
责任编辑:gt
-
处理器
+关注
关注
68文章
19313浏览量
230063 -
单片机
+关注
关注
6037文章
44564浏览量
635958 -
计算机
+关注
关注
19文章
7511浏览量
88086
发布评论请先 登录
相关推荐

MSP430单片机的同步串行SPI多通道温度测试系统设计详析
MSP430单片机实践篇之MSP430单片机ADC模数转换操作






 工商网监
工商网监
评论