 智能无人叉车的工作原理说明
智能无人叉车的工作原理说明
我们都知道,无人叉车具备了市场中定位精准的特性,还能够不需要靠基础设施去运行,就能灵活完成作业的优点,它的导航是采用远程管理控制信息技术,不仅能够节省人工,还能通过有效杜绝危险事故的发生。目前我国主流的两种导航方式分别是一种基于SLAM环境的自然导航、反射板导航。下面小编就来为大家简单分享一下这方面的相关知识智能无人叉车工作原理。
首先,反射板导航的原理: 在叉车行驶路线周围一定距离内,由反射板分隔布置,在叉车上安装激光扫描仪,这些激光束可以快速收集反射板反射的激光束。通过反射出来的光束数据来分析,可以知道叉车的具体位置和大概行驶的方向,并利用运动控制器的控制算法实现叉车的自动行驶。
第二,基于SLAM性质,导航:SLAM即同时定位和地图创建的,未知的环境,所述机器人通过内部传感器和本身进行由外部传感器定位本身,和定位的基础上,基于使用外部传感器取得的上环境信息,增量构建环境地图。
以上问题就是智能无人叉车厂家为大家介绍的内容了,希望对大家有帮助,此外,智能无人叉车中还装有监控设施,主要是用来扫描托盘的轮廓,保证叉车可以正常的作业。
责任编辑:YYX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51046浏览量
753140 -
智能
+关注
关注
8文章
1709浏览量
117493 -
SLAM
+关注
关注
23文章
423浏览量
31824
发布评论请先 登录
相关推荐
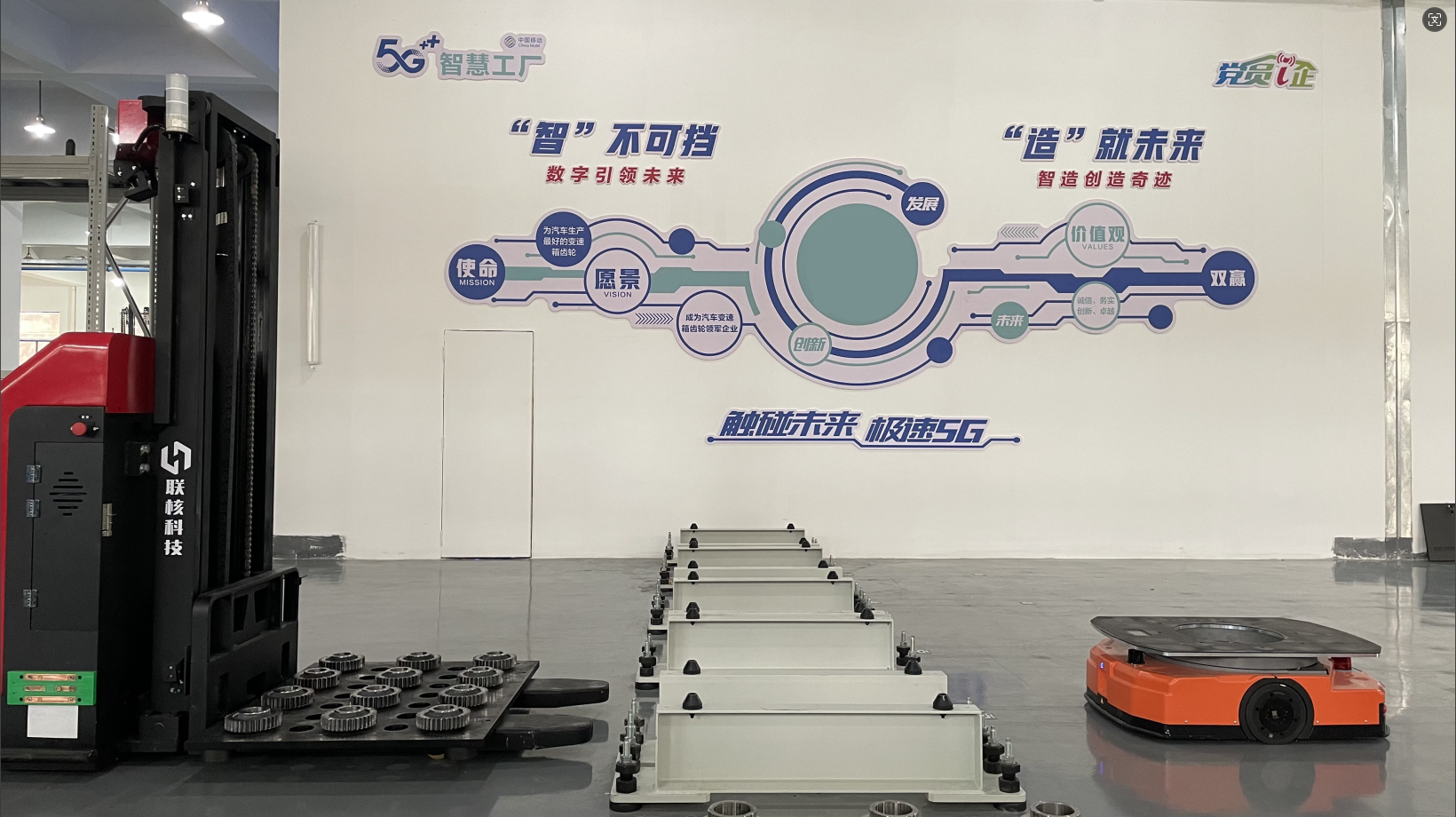
AGV无人叉车/电动叉车的立式舵轮选型指南
操控甚至全智能化操控,未来传统叉车向无人叉车、AGV(自动导引叉车)方向转型也已成为必然趋势。 MAINSTREAM FORKLIFT MO
无人叉车的安全性能如何保证?有哪些防护机制?
无人叉车通过集成多种高精度传感器、先进的控制系统和智能避障算法,实现了高精度定位与自主导航,确保了作业过程中人员与设备的安全。以下是无人叉车
标准型和定制型无人叉车有什么区别?定制型适用什么场景?
一、标准无人叉车与定制无人叉车的区别 设计与生产 标准无人叉车:采用批量生产的方式,设计成熟且稳

行业盘点:浅析无人叉车在家居行业的应用领域
到仓库的搬运任务,无需人工干预,显著提高了搬运效率。 精准对接:通过先进的视觉定位技术和智能调度算法,无人叉车能够精准对接生产线和仓库,减少等待时间和错误率。 二、降低人力成本 替代人工
无人叉车有哪些关键技术?核心零部件有哪些?买前必看
无人叉车的工作原理主要依赖于先进的导航、感知、路径规划和电动驱动等技术,确保车辆能够自主地在工业环境中完成物流和运输任务。以下是无人叉车工作原理
干货 购买无人叉车你必须知道的4条建议 都在这儿了
在现代化物流领域,无人叉车凭借其高效、智能和自动化的特点,已成为企业提升运营效率、降低成本的重要工具。然而,在购买无人叉车之前,企业需要对
买无人叉车要注意 这些和选型相关的知识必须了解
地标导航技术,以获得更高的定位精度和准确性。 这些技术能够确保无人叉车在复杂的室内环境中精确导航和定位。 3.作业效率 室内无人叉车能够在无人
Agv叉车由什么构成?工作原理是什么?易损件有哪些?
Agv叉车由什么构成?工作原理是什么?易损件有哪些? AGV叉车(自动导引车叉车)的工作原理可以概括为以下几个主要方面: 定位与导航:
镭神智能展示全球领先的3D SLAM无人叉车物流装备与技术
5月29日,2024年中国(广州)国际物流装备与技术展览会在广州中国进出口商品交易会展馆隆重召开,镭神智能机器人以其创新和前沿的3DSLAM无人叉车技术再次成为焦点,展示了极具代表性的3DSLAM


无人叉车有什么功能?能用于哪些行业?可适配什么载具?
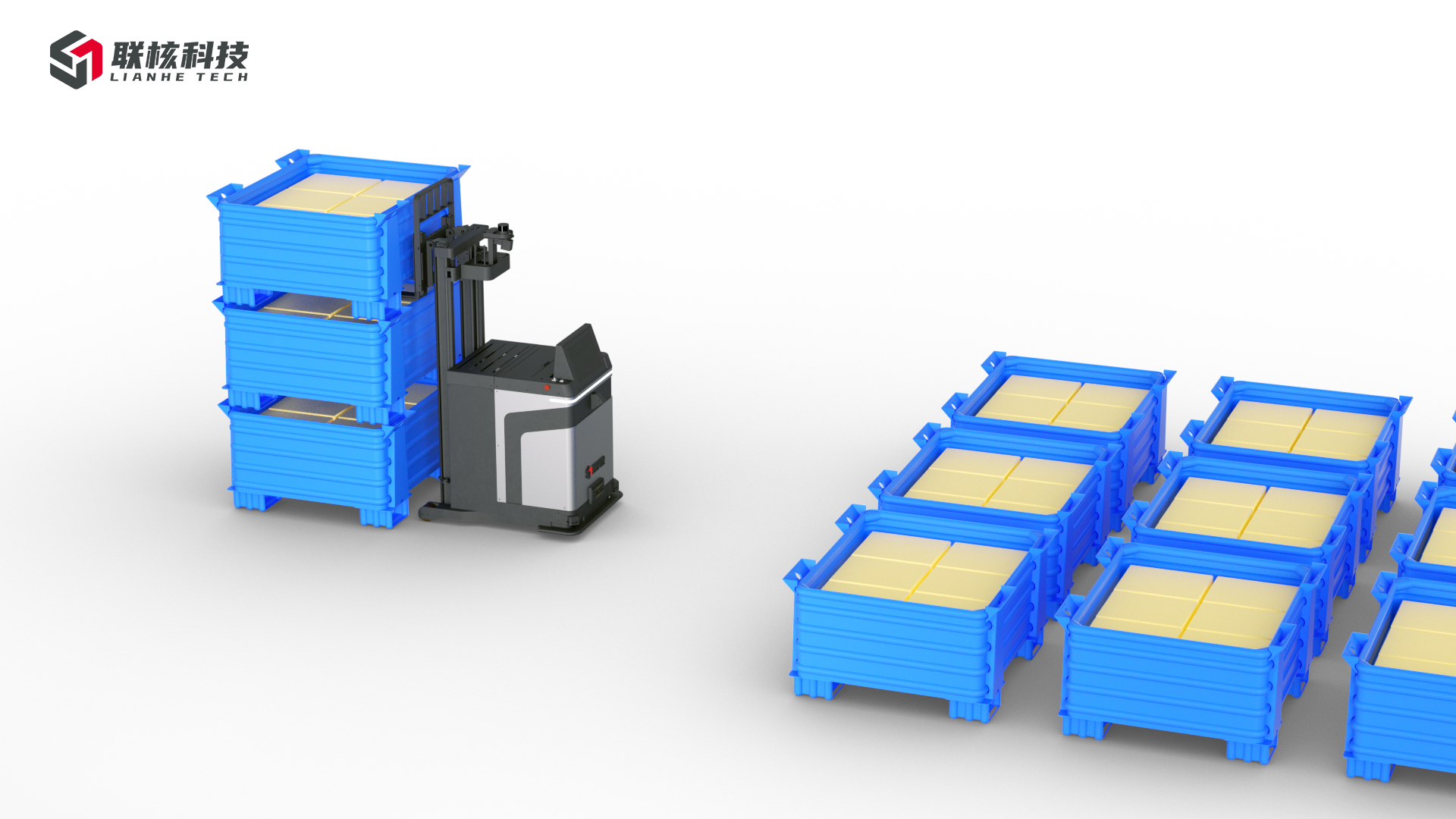
无人叉车,也被称为叉车AGV,具备多种功能,包括但不限于以下几点: 1.水平搬运:无人叉车可以在同一平面内进行物品的搬运,这是其最基本的功
无限动力:无人叉车无线充电技术的优势解析
仓储管理变革的核心是无人叉车,其通过无线充电技术实现自主间歇性充电,提升连续作业能力,降低人力成本,延长设备寿命,提高安全性,优化空间利用,并与智能物流体系无缝集成。鲁渝能源提供高效、安全的无线充电系统,推动
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
科技的视角,深入探讨无人机的组成与工作原理,为您揭开无人机飞行的神秘面纱。
一、无人机的组成结构
无人机主要由机身、动力系统、飞控系统、传感
发表于 03-12 11:28





 工商网监
工商网监
评论