 冰晶在HOPG材料上的生长过程和动力学行为
冰晶在HOPG材料上的生长过程和动力学行为
目前的大气科学研究表明,在大气气溶胶上冰的异质成核过程与气候环境息息相关。由于颗粒的表面结构和性质能够显著影响冰晶的成核效率(比如,包含石墨状结构的烟尘对于冰的异质成核效率有明显提升),因此探索材料表面结构对于冰晶成核生长过程的影响机理具有十分重要的意义。而目前因为缺乏直接的证据和有效的实验观察,材料表面的原子尺度结构缺陷对于气溶胶上冰晶生长的影响机理依然尚不明确。
近日,南昌大学费林峰课题组利用环境扫描电子显微镜(辅以冷却样品台),借用高定向热解石墨(HOPG)材料代表大气烟尘,原位研究了冰晶在该材料上的生长过程和动力学行为,相关成果近日发表于Nano Letters。 实验过程中,将HOPG衬底材料置于环境扫描电镜样品室的冷台上,通过控制衬底表面的温度以及水蒸气的压力,从而原位观察衬底表面上存在的原子级台阶对于冰晶成核生长过程的影响。结果表明,台阶作为异质成核的有效位点,冰晶优先在台阶处成核,同时原子级台阶诱导了冰晶定向排列生长行为。图1展示了-14 °C 下冰晶在HOPG表面台阶上的形成过程,冰晶的(0001)面与衬底表面平行生长,并且沿着台阶边缘定向排列,它们的a轴方向与台阶边缘方向一致。同时,在其他温度和复杂的台阶环境下都观察到了类似的现象,多个六方冰晶沿着台阶排列形成有趣的链状结构,如图2所示。
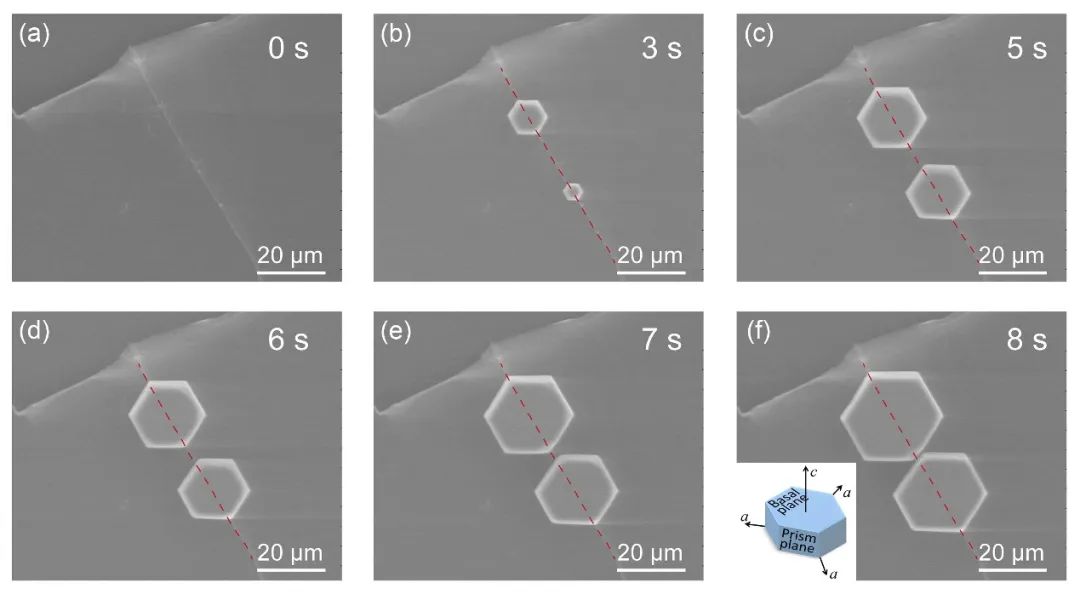
图1. (a-f) ESEM原位观察−14 °C下的原子级台阶诱导的六方冰晶生长过程。(f)中的插图表示冰晶的基本结构单元,含两个(0001)基面和六个等效(101—0)棱面,晶体有三个等效a轴。红色虚线表示衬底表面的原子台阶位置,下同。
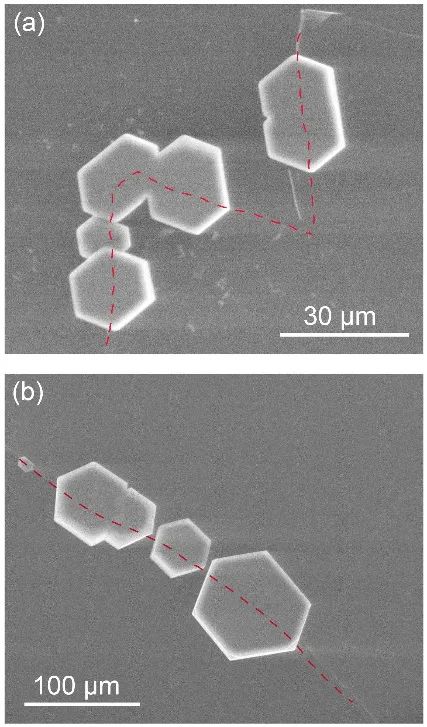
图2. 在(a) −15 °C和(b)−13 °C下,多个六方冰晶沿复杂的原子台阶形成链状排列。 作者认为冰晶沿原子台阶边缘的定向生长行为是由总系统能量的降低驱动的。为了从能量角度阐明这一过程发生的内在机理,他们运用第一性原理密度泛函理论(DFT),分别计算了水分子和六方冰团簇在HOPG原子台阶边缘的吸附能,结果如图3所示。石墨材料表面上存在的原子级台阶能够显著降低水的吸附能,其中相较于Armchair结构,Zigzag台阶结构更有利于水分子的吸附,因此在实验中,冰晶在台阶处表现出明显的优先成核现象。同时,通过比较不同方向的六方冰团簇在台阶处的吸附能,表明当六方冰晶的a轴与台阶边缘方向一致时,其吸附能最低,这也与实验结果一致。
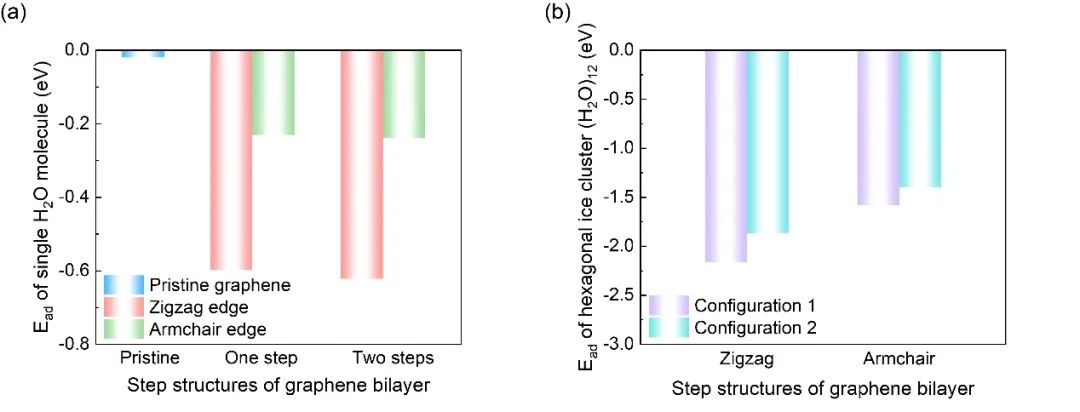
图3. (a) 单个H2O分子在原始石墨烯和具有不同台阶结构的石墨烯上的吸附能比较。(d) (H2O)12冰团簇构型1(a轴平行于台阶边缘)和构型2(a轴垂直于台阶边缘)在不同台阶结构的石墨烯上的吸附能比较。 在后续的生长中,作者等还进一步发现冰晶的形状会沿着台阶方向表现出明显的拉长,如图4a所示。作者通过统计冰晶轴向的长度随时间的变化来分析冰晶生长动力学行为,如图4b所示。结果表明,冰晶的生长过程可分为明显的两段,相较于第一段(冰晶沿着三个轴向都表现出基本相当的生长速率),冰晶在第二段明显更倾向于沿着a1方向(台阶方向)生长。这种动力学现象受控于冰晶生长过程中运输动力学(H2O分子从周围环境到结晶部位的迁移)与结晶动力学(分子/原子从无序结构到有序结构的重排)之间的竞争关系(图4c)。第一阶段,晶体尺寸很小,晶体的运输动力学较大,冰晶生长主要由本征的结晶动力学决定,因此冰晶表现出比较完美的正六边形(三个轴向长度基本一致);而到第二阶段,随着晶体尺寸的长大,晶体的运输动力学赶不上结晶动力学,生长取决于运输动力学,而台阶的存在更有利于水分子的输运,这时冰晶沿着台阶方向生长较快,形状也沿着a1方向(台阶方向)相应拉长。这样一种原子级台阶诱导冰晶定向排列的生长过程可以通过一个简单的模型描述,如图4d所示。
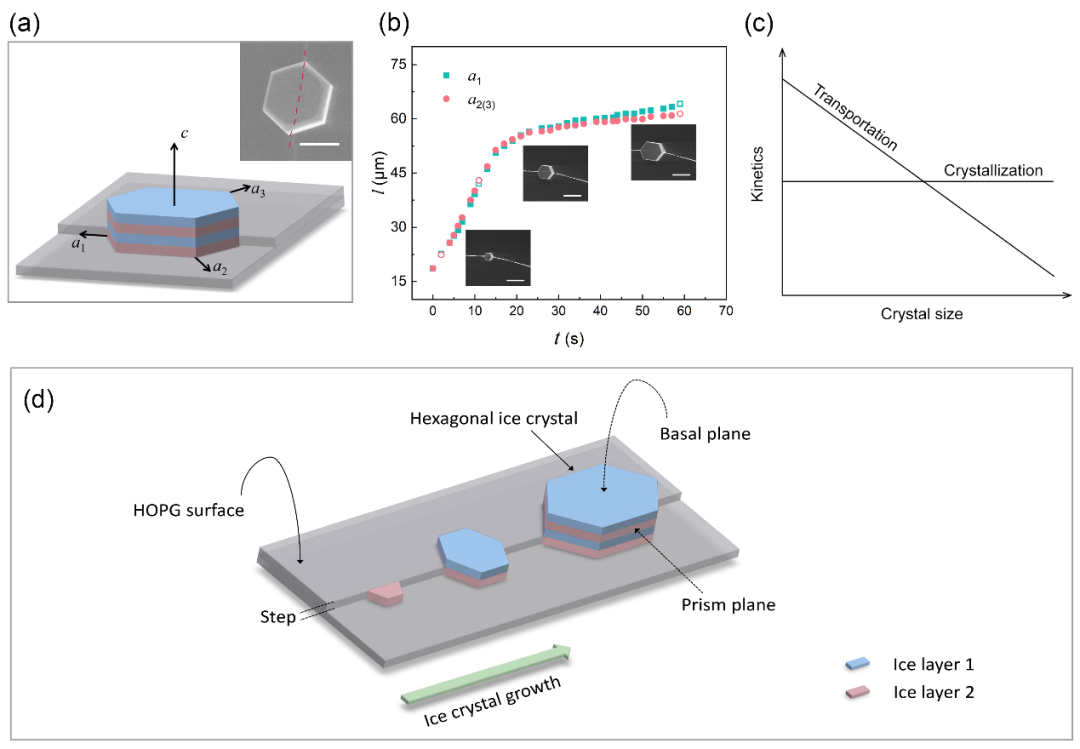
图4. 原子台阶诱导六方冰晶定向排列的生长动力学。(a)冰晶结构示意图。定义与台阶方向一致的a轴为a1轴,另两个轴为a2和a3。(b) −15 °C时,冰晶轴向长度随时间变化的统计数据。(c)生长过程中运输动力学与结晶动力学之间的竞争关系示意。(d)冰晶在HOPG表面原子级台阶处成核生长过程的示意图。 作者对六方冰晶在石墨表面上的生长行为进行了原位环境扫描电镜观察,阐述了原子级缺陷(台阶)对于整个过程的影响,并运用DFT计算从能量角度揭示了这一过程发生的内在机理。此项成果由南昌大学、香港理工大学等合作完成。
责任编辑:lq
-
石墨
+关注
关注
2文章
111浏览量
18499 -
动力学
+关注
关注
0文章
105浏览量
16958 -
石墨材料
+关注
关注
0文章
9浏览量
2950
原文标题:Nano Letters: 六方冰晶在石墨表面原子级台阶上的定向排列生长
文章出处:【微信号:zhishexueshuquan,微信公众号:知社学术圈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
“本源悟空”超导量子计算机助力大规模流体动力学量子计算

扫描速率对各体系的电化学行为有什么影响
ESI集团出席2024材料声学技术大会
圆满收官| Aigtek参展第二届波动力学前沿与应用学术会议载誉归来!

深视智能高速摄像机在液滴微控流实验中的应用

高速撞击下冰球冲击力学行为及材料响应的实验与数值模拟研究







 工商网监
工商网监
评论