 KUKAC4-VASS机器人抓手设置
KUKAC4-VASS机器人抓手设置
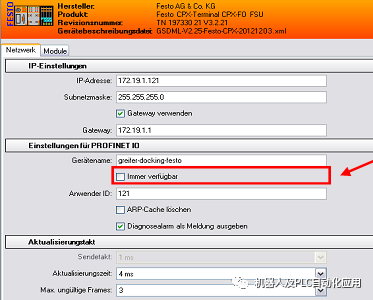
为了确保安全的PROFINET通信,必须根据下表配置PROFINET组件的更新时间。 请注意,所有设备都有自己的最短更新时间。 如果高于表中的规格,则必须为设备设置此最短更新时间。
抓手的更新时间是4S

抓手使用SMC阀导:
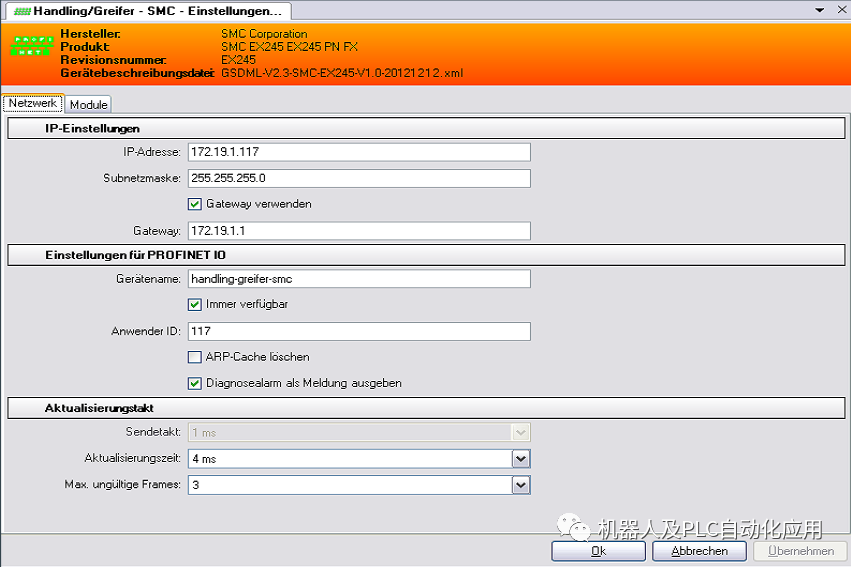

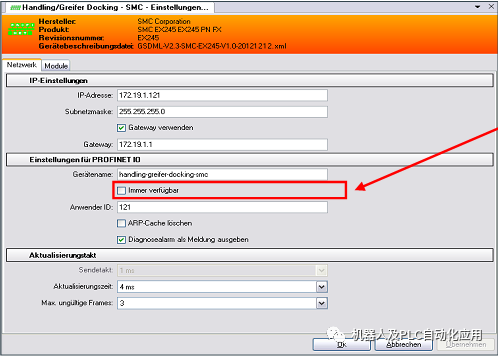
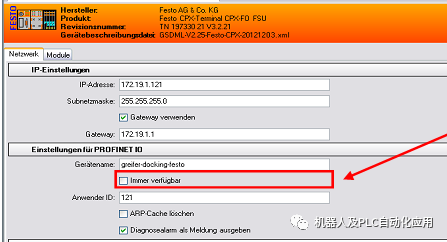
如果是快换抓手则不能勾选 “始终可用”。
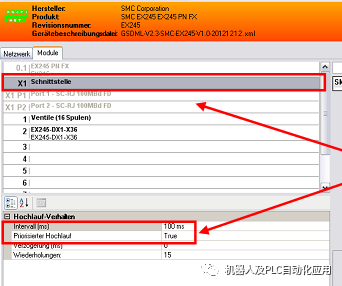
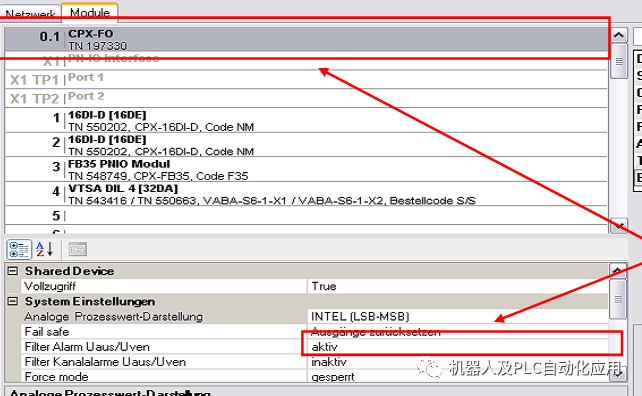
使用模块的优先启动“ True”
抓手使用FESTO阀导:
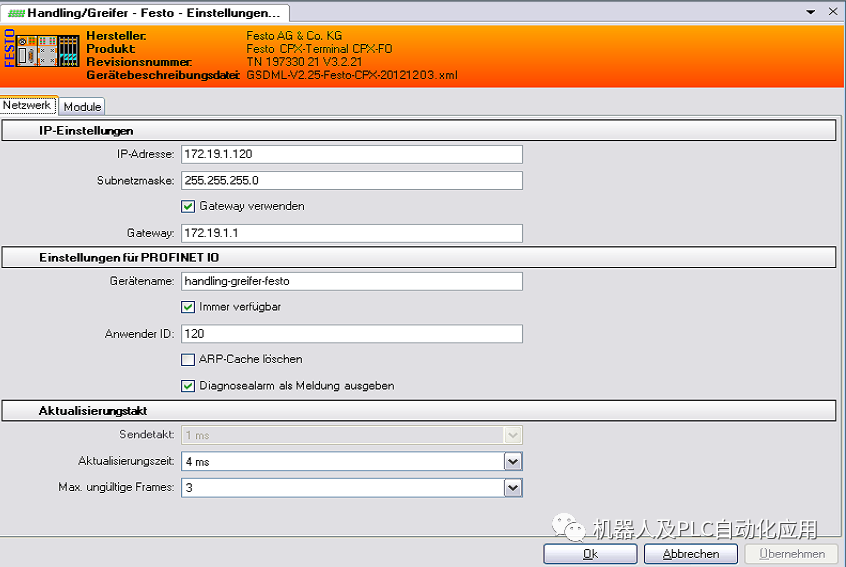
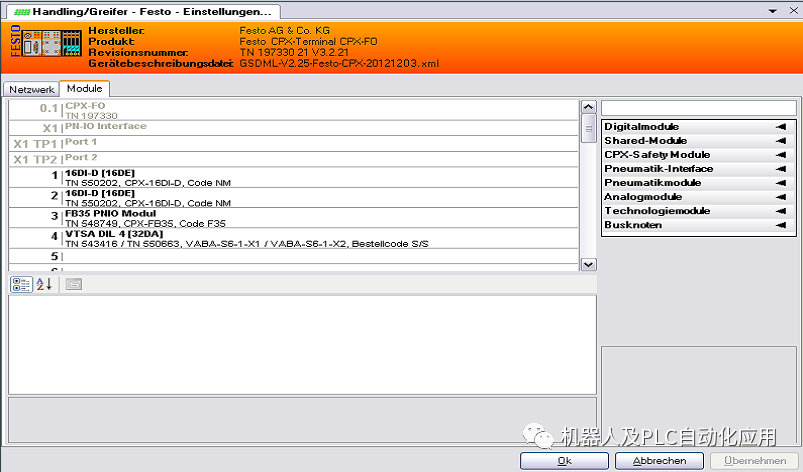
需要停用US2诊断
如果是快换抓手则不能勾选 “始终可用”。
使用模块的优先启动“ True”
3. 钳工能的设置
抓手
抓手
抓手
抓手

抓手
抓手

吸盘
-抓手的关键输入输出点A577打开先导阀 E577先导阀打开,E578先导阀关闭-
范围-E/A 577-704
16个字节-
617-628吸盘-
579开始是夹具
M1 = E579 & E580 + E15 BT1和BT2的检测以及E15空运转POT
M1 /M2 有件/没件(自己设置)
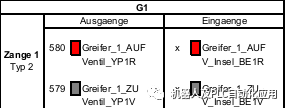
M31 = E583 & !E584 & E585 & !E586 ~ 抓手 1 AUF 打开
M32 = !E583 & E584 & !E585 & E586 ~ 抓手1 ZU 关闭
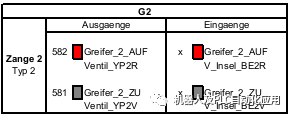
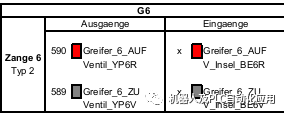
M33 = E587 & !E588 & E589 & !E590 ~抓手2 AUF 打开
M34 = !E587 & E588 & !E589 & E590 ~抓手2 ZU 关闭
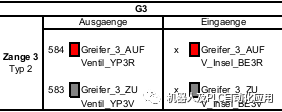
M35 = E591 & !E592 & E593 & !E594 ~抓手3 AUF 打开
M36 = !E591 & E592 & !E593 & E594 ~抓手3 ZU 关闭
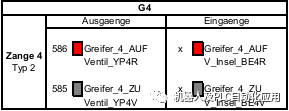
M37 = E595 & !E596 & E597 & !E598 ~抓手4 AUF 打开
M38 = !E595 & E596 & !E597 & E598 ~抓手4 ZU 关闭
M63,M64-M68 吸盘
F54 〜选择无吹气的吸入回路
F523 〜G KYP01E反馈可用控制空气(常闭触点)
F524 〜G KYP01E反馈控制空气不可用(常开触点)
;FOLDF523 = EIN -需要压力检测
F524 = AUS -不需要压力检测
责任编辑:lq
-
机器人
+关注
关注
211文章
28466浏览量
207295 -
通信
+关注
关注
18文章
6036浏览量
136060 -
Profinet
+关注
关注
6文章
1193浏览量
23430
原文标题:KUKAC4-VASS机器人抓手设置(全)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
焊接机器人拖拽轨迹怎么设置

焊接机器人示教模式怎么设置






 工商网监
工商网监
评论