 KUKAC4通过逆向启动键执行反向运行
KUKAC4通过逆向启动键执行反向运行
通过逆向启动键执行反向运行

逆向启动键。用逆向启动键可逆向启动一个程序。程序将逐步运行。
行反向运动 (通过逆向启动键):
如果应优化运动的序列并且为此目的重新示教各个点,则通过逆向启动键经常使用反向运行。用户沿轨迹反向运动,直到到达待修正的点。在重新示教此点之后,必要时继续向后运行,以修正其他点。
后退时,自动采用程序运行方式 #BSTEP。
$PRO_MODE程序运行模式#BSTEP后退步进: 连续后退执行到程序的开始.
后退时不能进行轨迹逼近或摆动。如果前行时这些点已被轨迹逼近或摆动,则返回轨迹将不同于前行轨迹。由此在逆向启动后,尽管机器人完全没有脱离前行轨迹,但它可能必须先执行一次 BCO 运行。
BCO 运行必须作为 LIN 或 PTP 运动从实际位置移动到目标位置。速度已自动下降。无法确保预见运动过程。在 BCO 运行时观察运动,以便有发生碰撞的危险时机器人可及时停止。
操作步骤:
1.按住确认开关,直至状态栏 “ 驱动器已准备就绪 ” 显示:

2. 按下并且按住逆向 (后退)启动键。
如果机器人已经位于后退轨迹上,则即刻后退。
如果机器人没有位于后退轨迹上,则即刻驶向那里。当信息窗口显示“已达 BCO” 时,说明机器人已经达到此轨迹。机器人停下。重新按下逆向启动键。机器人现在后退。
2.对每一个运动组都要重新按下逆向启动键。
反向运行的工作原理和特性:
工作原理 :
正向运行时,机器人控制系统将执行完毕的运动存在一个环形缓冲器中。反向运行时,根据所存的信息执行这些运动。
删除缓冲器后不可反向运行:
下列情况下将删除缓冲器的内容。只有当重新执行正向运动后,才可再次执行反向运动。
l重置程序。
l选择程序。
l在程序中添加或删除行。
lKRL 指令 RESUME
l语句选择另一种运动作为当前运动。
在当前样条组内的任意一个段点选择语句均可不受限制。这被视为针对当前运动的语句选择,因为机器人控制系统把一个样条组作为一个运动进行设计和执行。
机器人控制系统删除缓冲器,对此不发出提示信息。
属性:
l仅在运行方式 T1 和 T2 下可反向运行。
l在反向运行时,仅仅执行运动,无控制结构和控制指令。
l在正向运行时不记录输出端和旗标。所以反向运行时不能恢复之前的状态。
l速度和前行时相同。
监控装置会在运行方式 T2 下反向运行时作出响应,而在正向运行时没有反应。在此情况下,必须降低程序倍率。
l反向运行默认为激活。专家用户组可取消激活反向运行或在特定运动中有针对性地阻止反向运行。
有子程序时的特性
l 在一个中断程序中前行的运动不被记录。所以也不能后退。
l 如果一个子程序在前行时已完全运行完毕,则无法后退运行。
l 如果前行运动在子程序中停止,则后续反应取决于预进指针的位置:
| 预进指针在子程序中。 | 可后退。 |
| 预进指针已脱离子程序。 |
不可后退。 预防措施:在子程序结束前触发预进停止的指令,例如:用 WAIT SEC 0 指令。但之后此处无法再进行轨迹逼近。或将 $ADVANCE 设为 "1"。无法始终防止故障信息出现,但可降低概率。仍可进行轨迹逼近。 |
轨迹逼近时的动作
后退时不能进行轨迹逼近。如果前行时这些点已轨迹逼近,则退回轨迹将不同于前行轨迹。因此在逆向启动后,尽管机器人完全没有脱离前行轨迹,但它可能必须先执行一次 BCO 运行到后退轨迹上。
在逼近区域外的逆向启动:
当机器人位于轨迹上,但不在逼近区域内时,按下逆向启动键。机器人现在在轨迹上后退到上一次运动的目标点。
PBACK = 按下逆向启动键时机器人的位置
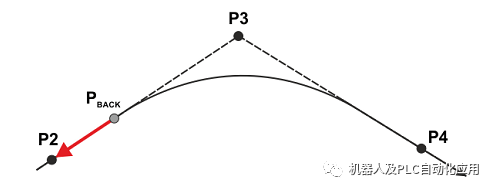
当上一次运动的目标点被轨迹逼近后,仍会精确地移至此点。
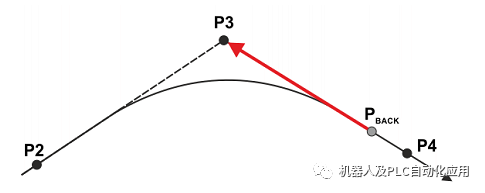
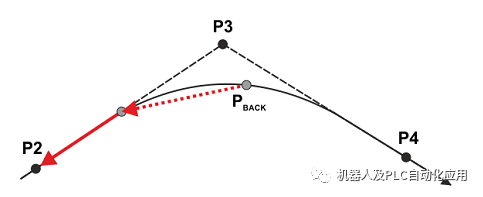
在逼近区域内的逆向启动:
当机器人位于逼近区域内时,按下逆向启动键。现在机器人在逼近区域的起始处执行 BCO 运行并且在此停机。如果现在再按一次逆向启动键,则开始原来的反向运行,即机器人在轨迹上后退到上一次运动的目标点。
从后退切换至前行:
仅满足以下前提条件时才允许在后退后重新向前运行:
l 可以对后退语句指针所在的程序行进行语句选择。
l 如果应重新前行的第一个运动是常规运动,则必须已对其完全编程。
例如:如果第一项运动是 PTP_REL,则无法从后退切换至前行。除了少数例外情况,样条运动不会受到这种限制。
如果后退后首次按下启动正向运行按键,则特性如下:
l 如果有 BCO,则自动恢复上一次前行程序运行方式,机器人沿轨迹向前运行。
l 如果没有 BCO,则执行 BCO 运行。在此期间,程序运行方式还在 #BSTEP 上。机器人在 BCO 运行后停机。此时必须再次按下启动正向运行(前行)按键。自动恢复上一次前行的程序运行方式,机器人此时沿轨迹向前运行。
如果在一个控制结构内从后退切换至前行,则机器人先前行至控制结构的末端。然后机器人伴随信息提示 “下一语句 { 语句编号 } 的控制结构”停止运行。该语句编号给出控制结构后的第一个语句。
责任编辑:lq
-
控制系统
+关注
关注
41文章
6633浏览量
110680 -
机器人
+关注
关注
211文章
28494浏览量
207448 -
程序
+关注
关注
117文章
3791浏览量
81153
原文标题:KUKAC4通过逆向启动键执行反向运行
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
过压保护、防反接、缓启动电源保护电路的原理
AMEYA360:永铭超级电容助力4G智联锂电“一键强启”功能
启动绕组与运行绕组的区别是什么
ESP32C3通过QSPI flash来片外运行代码,如果频繁地存储录音音频数据,会影响程序运行吗?

STM32H747用DTCM-ram启动,跳转之后app程序无法运行的原因?
ZR执行器的抗干扰能力:稳定运行的关键

你想轻松掌握PCB逆向研发原理图吗
CYUSB3014通过SPI接口固化img到M25P40重启失败怎么解决?
STM32L431RCT6通过RT Thread stdio生成项目为什么无法启动?
IGBT开通过程发生的过流、短路故障
BLDC电机启动失败的原因?

GD32 MCU启动后如何运行到main函数





 工商网监
工商网监
评论