 KUKA C 4掉电极帽关水是怎么回事
KUKA C 4掉电极帽关水是怎么回事
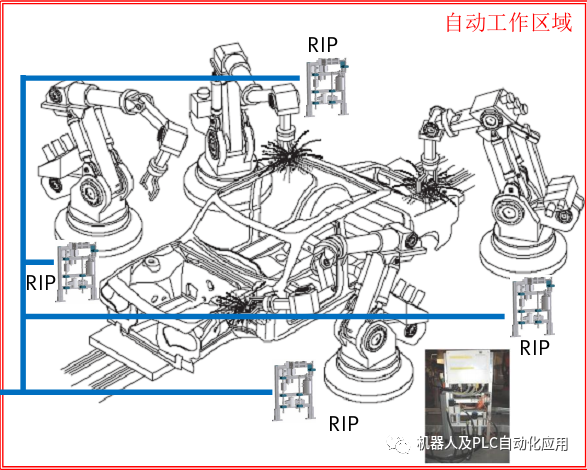
RIP的各元器件

1.控制RIP的USER程序在这里.正常情况下这个是大众统一的标准程序.我只能说出像问题的概率是很低的!我们要知道掉电极产生时,机器人程序会发生什么!
下图:机器人RIP.
从图片中我们知道机器人RIP的标准控制结构的阀体是不使用先导阀的直接由换向阀控制开关水,即A513/A515 .

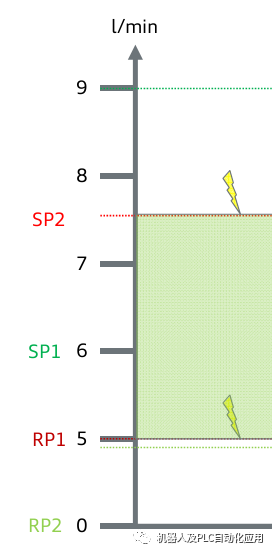
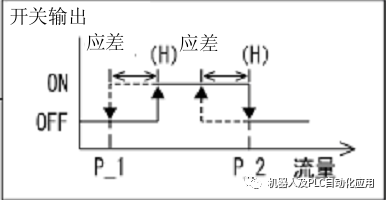
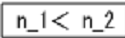
SP2 =上限值(帽被撕下)
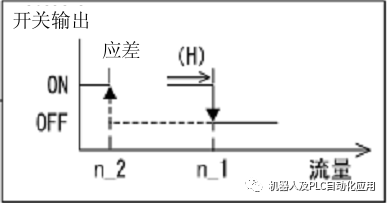
SP1 =较低的最大关断值
RP1 =较低的关闭值(阻止冷却)
RP2 =上限值的最小值
设置流量监控器的值
大众标准规定设置值,但绝大多数现场是不能满足的,需要灵活设置,需要实验!不能教条!
SP2 = 7.5升/分钟
RP2 = 0.0升/分钟
SP1 = 6.0升/分钟
RP1 = 5.0升/分钟
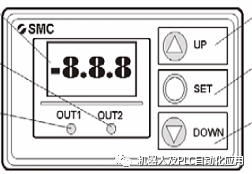
OUT 1 = 常开
OUT 2 = 常闭
对于SMC来说需要设置P1-P2(低压部分),n3-n4(高压部分如果超出设定值认为电极帽以掉).
输出取正时:

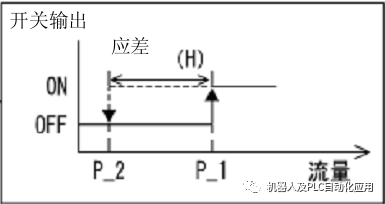
输出取反时:
“控制低压”(E516,E524,E532)必须集成到行驶状态中。
F819 = EIN 〜通过MAKRO50中的水回路激活大众RIP.
F820 = EIN 〜在过MAKRO50中激活不带水回路的大众RIP.
F817 = EIN 〜激活大众RIP而不检查宏50中的低压, 对于不带低压控制的大众RIP(BD01ND)
RIP的主要控制信号
GLOBAL INT I_BV01WMIN=514 E514最小水流量的监控值取正值.
GLOBAL INT I_BV01WMAX=515 E515最大水流量的监控值被检测开关取反设置.
GLOBAL INT I_BD01ND=516 有低压气
GLOBAL INT O_KYP01WE=513 输出开水
GLOBAL INT O_KYP01WA=515 输出关水
如果正确的水流量正确,则输入为(#冷却水最小值= TRUE)和(#冷却水最大值= TRUE)。
如果水流量太低,则输入为(#冷却水最小值= FALSE),输入为(#冷却水最大值= TRUE)。
如果水流量过高,则输入为(#冷却水最小值= TRUE)和INPUT(#冷却水最大值= FALSE)。
如果取下电极帽(最大流量),则4秒钟后关闭冷却水。
在WASSER的USER程序控制
IF NOT WASSERSTOE THEN -如果没有水故障
-水流量超过最大流量故障-可认为是电极帽掉了/漏了
IF ($IN[I_BV01WMIN] AND NOT $IN[I_BV01WMAX]) OR ($IN[I_BV02WMIN] AND NOT $IN[I_BV02WMAX]) OR ($IN[I_BV03WMIN] AND NOT $IN[I_BV03WMAX]) THEN
-E514 有低压水和没有高压水E515-
-正常情况下是E514和E515高低水都有,当水压制超过高压水时E515会变为FLASE
-因此在调解水流量阀时因该注意高压水压力值不能太大。
责任编辑:lq
-
机器人
+关注
关注
211文章
28423浏览量
207141 -
RIP
+关注
关注
0文章
31浏览量
10763 -
KUKA
+关注
关注
3文章
217浏览量
16535
原文标题:说说KUKA C 4掉电极帽关水是咋回事
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ADS127L01连接C5535数据无法读出是怎么回事?
脑电帽怎么接?
电阻正电极脱落是怎么回事如何解决





 工商网监
工商网监
评论