 KUKA机器人的初始化运行称为BCO运行
KUKA机器人的初始化运行称为BCO运行
KUKA 机器人的初始化运行称为 BCO 运行。
BCO 是 B lock coincidence (即程序段重合)的缩写。重合意为 “ 一致 ” 及 “ 时间 / 空间事件的会合 ”。
在下列情况下要进行 BCO 运行:
选择程序 (例 1)
程序复位: 复位 (例 1)
程序执行时手动移动 (例 1)
更改程序 (例 2)
语句行选择 (例 3)
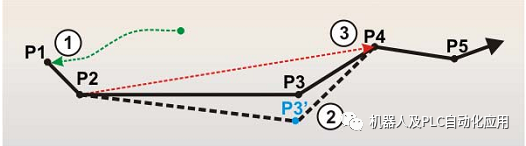
BCO 运行执行举例
1 选定程序或程序复位后 BCO 运行至原始位置
2 更改了运动指令后执行 BCO 运行 删除、示教了点后
3 进行了语句行选择后执行 BCO 运行
BCO 运行的原因 :
为了使当前的机器人位置与机器人程序中的当前点位置保持一致,必须执行 BCO 运行。
仅当当前的机器人位置与编程设定的位置相同时才可进行轨迹规划。因此,首先必须将 TCP 置于轨迹上。
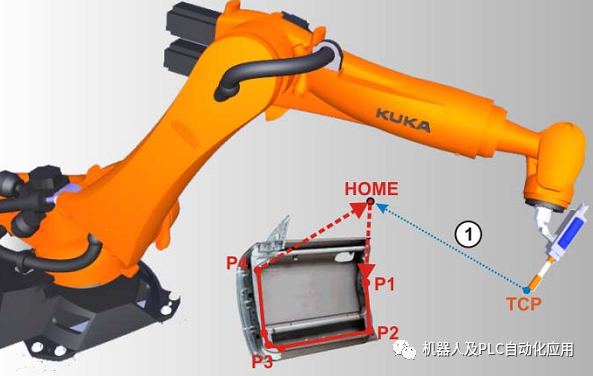
在选择或者复位程序后 BCO 运行至 Home 位置
相关系统变量
$ON_PATH 在轨迹上
用于监视编程路径的信号声明
BCO运行后设置此输出。因此,机器人控制器会与上级控制器通信,使机器人位于编程路径上,只有当机器人离开路径,程序被复位或执行块选择时,输出才再次复位。
VW标准设置 :SIGNAL $ON_PATH $OUT[4040]
$MOVE_BCO
指示当前是否正在执行BCO运行
$MOVE_BCO=State
true:正在进行BCO运行。
false:不进行BCO运行。
责任编辑:lq
-
控制器
+关注
关注
112文章
16385浏览量
178386 -
机器人
+关注
关注
211文章
28468浏览量
207369 -
程序
+关注
关注
117文章
3788浏览量
81130
原文标题:BCO 运行
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型


开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
Al大模型机器人
工业机器人仿真软件有哪些

运动控制器的代码运行顺序是什么
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
工业4.0中的机器人向协作机器人演进
KUKA机器人8.7系统对PROFINET软件进行编程控制的步骤

MCU单片机GPIO初始化该按什么顺序配置?为什么初始化时有电平跳变?






 工商网监
工商网监
评论