 KUKA的碰撞识别(KSS版)
KUKA的碰撞识别(KSS版)

碰撞识别:
如果一个机器人与一个物件发生碰撞,则机器人控制系统将提高轴扭矩,以便克服阻力。这时可能会损坏机器人、工具或其它零部件。
碰撞识别将减小此类损坏的风险。碰撞识别系统监控轴转矩。如果该转矩与特定的公差范围有偏差,将出现以下反应:
• 机器人以 STOP 2 停止。
• 信息 确认轴 {轴编号} 的碰撞识别
• 信号 $COLL_ALARM 变为 TRUE。 SIGNAL $COLL_ALARM FALSE
• 机器人控制系统调用程序 CollDetect_UserAction。
程序位于文件夹 R1Program 中。默认情况下,它不含指令。在需要时,用户可以在 CollDetect_UserAction 中编程其所需的反应。对此的前提条件是专家或更高级别的用户组。
程序 CollDetect_UserAction 由机器人控制系统通过 $STOPMESS 中断调用。因此,在编程时必须注意适用于相关中断程序的限制。
SIGNAL $STOPMESS $OUT[4048] ;STOP-MELDUNG
碰撞识别的基本前提是:
• $IMPROVED_COLLMON == TRUE (这是默认设置。)
• $ADAP_ACC ≠ #NONE (这是默认设置。)$ADAP_ACC=#STEP2
• 负载数据正确。
在早期 KSS 版本中的程序中可能仍使用通过行指令 TORQMON SetLimits 编程的力矩监控。该监控基本上仍功能正常并且显示出其早期特性。
但是,前提条件是:$IMPROVED_COLLMON == FALSE。因此,当前版本的碰撞识别不可用。
基本上只能使用旧的力矩监控 (TORQMON) 或者当前的碰撞识别。不能一起使用这两个功能。
即使在 $IMPROVED_COLLMON == FALSE 时,也不(!)可再编程之前的行指令 TORQMON。
在碰撞之后继续运行
如果有信息 确认轴 {轴编号} 的碰撞识别,则在可以重新运行机器人之前,必须对其进行确认。如果不再有 $STOPMESS,信号 $COLL_ALARM 重新变为FALSE。
程序运行下的继续运行:
如果在识别到的碰撞之后继续程序运行(通过启动或启动反向),则该识别立即重新激活。
手动运行下的继续运行:
如果要在识别到的碰撞之后手动运行,则自动中断识别 60 ms。
在碰撞之后,作用力和力矩对机器人轴的作用很强,使识别功能可以持续地防止继续运行。用户必须手动退回机器人,即从碰撞位置移出。
有以下方法退回机器人:
• 通过运行键(手动移动选项,选项 轨迹)反向运行
自动取消碰撞识别 1 秒。机器人延之前运行的轨迹返回。
• 手动移动选项,选项跨接碰撞识别
用户可以通过复选框跨接即停用碰撞识别。在通过复选框重新激活之前保持不激活状态。
优先使用选项轨迹进行回退。
在无法使用轨迹时才使用跨接碰撞识别,例如在碰撞后卡住了机器人时。
接通通用碰撞识别
通用碰撞识别的优点是只需接通一次,而非为每个运动语句进行接通。但是,如果要确保即使在语句选择之后碰撞识别也始终与确定的设置一起生效,必须为每个运动语句接通碰撞识别。
• 用户权限:功能组一般 KRL 程序更改
• 已选择或打开程序。
• 运行模式 T1
• 如果要使用 SetDefault 行指令:
在 KRC:STEUMada$custom.dat 中保存了值。
• 如果要使用 UseDataSet 行指令:
至少一个数据组已填充了值。
1. 选择指令 > 移动参数 > 碰撞识别。
2. 根据要从何处获取碰撞识别的值,在行指令中选择下面的条目:
• SetDefault 将 $custom.dat 中的默认值用于碰撞识别。

• SetLimits
为每个轴指定所需的碰撞识别灵敏度。默认:50%

• UseDataSet
选择要为碰撞识别使用其值的数据组。

3. 按 指令 OK 键确认。
1.选择指令 > 移动参数 > 碰撞识别。在行指令中选择 Off。
2.按 指令 OK 键确认
接通运动的碰撞识别
为了接通运动的碰撞识别功能,用户可在运动行指令中选择一个数据组。
同时接通了通用和运动上的碰撞识别:
可能同时接通了通用碰撞识别和运动碰撞识别。运动上的设置将覆盖通用设置。
样条段:
在样条组内,默认情况下样条段继承该样条组的设置。但是,用户可以为每个段进行单独的设置。
1. 如果在行指令中不显示栏 ColDetect,则可以通过 切换参数 > 碰撞识别 进行显示。
2. 在行指令的 ColDetect 下选择数据组。
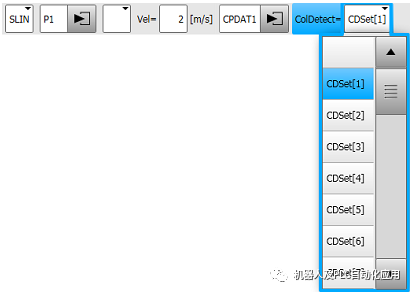
3. 用 指令 OK 确认选择。
在编辑器中,该指令现在包含补充 ColDetect[编号]。

在带数据组的列表的顶部有一个空栏。如果选择该空栏,这表示:
• 此运动没有自己的碰撞识别设置。如果接通了通用碰撞识别,则它将继承其设置。
在样条段中,该列表不含空栏。
如果希望样条段没有自己的设置,则在必要时通过 切换参数 > 碰撞识别 隐藏 ColDetect 栏。但是,对于段“隐藏”已经是默认状态。
仅对于样条段,数据组列表含有 OFF 条目。OFF 将关闭该段的碰撞识别。
在编辑器中显示样条设置
SPLINE S1 VEL=2 m/s CPDAT2 Tool[1] Base[1] ColDetect[1]
SLIN P2
SLIN P3 ColDetect[2]
SLIN P4 ColDetect=OFF
ENDPLINE
设置 ColDetect[1] 适用于样条组。
SLIN P2 没有自己的设置。这表示它将继承样条组的设置,即
ColDetect[1]。
ColDetect[2] 适用于 SLIN P3。
为 SLIN P4 关闭了碰撞识别。
在主菜单中选择配置 > 碰撞识别 > 视图。

| 1 | 轴编号 |
| 2 |
每个轴当前已激活的极限。这可以是手动运行的极限或程序运行的极限。 该值越小,识别越灵敏。“0”表示该轴的识别未激活。 |
| 3 |
也在窗口 碰撞识别 - 手动运行配置 和 碰撞识别 - 数据组配置的相同列中显示相同的值。用户可以将这些值归零。 • 0 … 500 |
| 4 |
当前用于手动运行的碰撞识别值 • 该值基于窗口 碰撞识别 - 手动运行配置 的列 默认值。 • 此外,从窗口 手动移动选项 中导入系数 标准值偏量。 |
| 5 |
• 灰色:碰撞识别未激活。 • 绿色:碰撞识别已激活。 |
| 6 |
• 灰色:无碰撞。 • 红色:控制系统识别到碰撞。 |
| 7 | 将所有轴的峰值设为零。 |
$STOPMESS:
停止消息的信号声明
设置此输出是为了将需要停止机器人的任何消息的发生传达给上级控制器。例如,在紧急停止或操作员安全违规后。
SIGNAL $STOPMESS $OUT[Output number]
责任编辑:lq
-
控制系统
+关注
关注
41文章
6997浏览量
114539 -
机器人
+关注
关注
214文章
31602浏览量
224271 -
KUKA
+关注
关注
3文章
218浏览量
17525
原文标题:KUKA的碰撞识别(KSS版)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
ADAS和ADS谁更安全?1549起真实碰撞数据,揭露自动驾驶安全真相

汽车碰撞试验:在极限“撞毁”中,为生命构筑安全防线

语音识别IC分类,语音识别芯片的工作原理
佛瑞亚海拉推出全新碰撞电源模块
【道生物联TKB-623评估板试用】基于新一代 TurMass™无线通信的 TKB-623 塔吊防碰撞系统
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
超高频RFID读写器原理详解:工作方式、识别距离与应用场景

精准高效:掌握三坐标测头角度快速识别方法

高铁涵洞限高架防碰撞预警智能识别超高车辆

基于LockAI视觉识别模块:C++人脸识别

基于LockAI视觉识别模块:手写数字识别
基于LockAI视觉识别模块:手写数字识别
集装箱残损智能识别系统——华明视讯的机器视觉创新应用
基于LockAI视觉识别模块:C++条码识别



评论