 看顶尖芯片公司工程师写总结报告
看顶尖芯片公司工程师写总结报告
Seeed STM32MP157C EVK开发板试用报告概述安装系统和必要的系统工具包 通过SD卡烧写系统 升级系统 常规软件安装 PC机工具软件通过GPIO控制小灯闪烁通过I2C同PCA9685通信控制舵机心得体会
概述 在第一期FunPack活动中,我使用Seeed STM32MP157C板子,实现了两个小程序:
通过GPIO控制小灯闪烁
通过I2C同PCA9685舵机控制板通信, 从而控制SG90舵机
同以往开发MCU的思路不同,这次的开发平台是运行了Linux系统的MPU平台,因此不适合使用MCU开发中基于芯片手册和读写寄存器的编程思路。既然使用了Linux系统,,那么自然要利用Linux平台下软件丰 富,通用性强的便利。在这次学习过程中,我在Linux平台上,分别使用了Seeed公司开发的grove.py代码包和Adafruit公司开发的adafruit_python_pca9685工具包,访问底层的GPIO和I2C外设模块。这些代码包已经对底层的操作,包括Linux操作系统层面上和芯片硬件层面上,都已经进行了充分的封装,我在自己 的程序文件中,只要根据文档说明调用API即可,同时,python语言的运行环境相对于基于C的嵌入式系统开发环境十分友好,我没有在搭建工程框架上(需要研究启动代码,链接命令文件,查阅芯片手册中的寄存器等等)花费任何时间,短短几行代码就能实现我想要的功能。 下面具体说明我实现这两个小程序的操作步骤:
安装系统和必要的系统工具包
这部分内容主要参考Seeed官方的wiki:https://wiki.seeedstudio.com/ODYSSEY-STM32MP157C/ 通过SD卡烧写系统具体操作过程可参见wiki说明,这里简述一下其中的思路:首先通过电脑上的一个烧写工具软件,将Linux系统的镜像文件烧写到SD卡上。将SD卡插入开发板,首次启动一定要从SD卡启动,然后运行SD卡系统中的脚本,将SD卡中的系统复制到板载的eMMC存储芯片上,这相当于是想eMMC存储芯片安装系统。然后通过板子的拨码开关切换到从eMMC启动,之后拔出SD卡重新启动,系统就从eMMC中启动并运行了。SD 卡在这个过程中相当于是一个"安装光盘",板载的eMMC存储芯片就是系统里的硬盘。安装系统之后就不 需要SD卡了。
sudo sh -c "echo cmdline=init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3-stm32mp1.sh >> /boot/uEnv.txt"sudo reboot 升级系统烧写系统后,必须先要升级系统,否则很多更新过的软件无法正常安装。
sudo apt update 常规软件安装linux系统头文件
sudo apt install linux-headers-$(uname -r) -y build管理: make
sudo apt install make device-tree-compiler gcc -y 远程登录: ssh
sudo apt install ssh -y 代码仓库下载: git
sudo apt install git -y 常规下载工具: wget
sudo apt install wget -y 编程和脚本语言python
sudo apt updatesudo apt install python3 python3-distutils python3-pyqt5 python3-pip python3-numpy -ysudopip3installpython-canpyqtgraph 设备管理器driver overlay下载并编译stm32mp1的设备管理器:
git clone https://github.com/Seeed-Studio/seeed-linux-dtverlayscd seeed-linux-dtverlaysmake all_stm32mp1 CUSTOM_MOD_FILTER_OUT="jtsn-wm8960" && sudo make install_stm32mp1 CUSTOM_MOD_FILTER_OUT="jtsn-wm8960" 设定启动后自动加载设备:
sudo sh -c "echo uboot_overlay_addr0=/lib/firmware/stm32mp1-seeed-ap6236-overlay.dtbo >> /boot/uEnv.txt"sudo sh -c "echo uboot_overlay_addr1=/lib/firmware/stm32mp1-seeed-spi5-overlay.dtbo >> /boot/uEnv.txt"sudo sh -c "echo uboot_overlay_addr2=/lib/firmware/stm32mp1-seeed-usart2-overlay.dtbo >> /boot/uEnv.txt"sudo sh -c "echo uboot_overlay_addr3=/lib/firmware/stm32mp1-seeed-i2c4-overlay.dtbo >> /boot/uEnv.txt"sudo reboot driver overlay相当于是一个系统中注册过的设备管理器,主要是在树莓派的linux系统中使用。一些专门 的可以操纵底层硬件的python软件库,会通过注册到driver overlay中的设备操作硬件。 PC机工具软件我使用Windows系统作为PC机的主系统。毕竟Windows的各种桌面工具十分完善,日常用起来十分方便。 Tera Team在Windows下运行的终端工具,在本例中,可以连UART串口,也可以连ssh。
WinSCPWinSCP是通过ssh向linux目标系统传送文件的工具。在实际开发过程中,我都是预先在Windows上使用我熟悉的各种代码编辑器写好代码文件,然后通过WinSCP上传至linux目标系统。虽然我也会在必要的情况下使用linux命令行窗口中的vim和nano,但总归是用windows在图形用户界面中编辑代码更加高效。 实际上,也可以再WinSCP的登录窗口中直接打开linux目标系统中的文件,编辑后保存,WinSCP会自动将最后保存的文件同步到远程的linux目标系统中。
通过GPIO控制小灯闪烁 不同于以往写MCU程序时,需要通过查阅硬件手册查找合适的寄存器,进而控制硬件。在本例中,我既然使 用了Linux平台,就要充分发挥Linux平台上工具丰富的特点。为了控制GPIO引脚上的输出输出电平信号,我使用了grove的工具包。 由于在准备系统平台过程中,已经编译和安装了seeed-linux-dtverlays,接下来可以直接安装grove.py软件包:
sudo pip3 install Seeed-grove.py 如果熟悉grove.py的话,此时已经可以开始开发了。我是第一次使用这个工具包,下载了grove.py的源码仓库,然后从中找到一些样例代码。 这里不得不吐槽一下,grove.py的wiki网站框架是很不错的,但是里面的内容还亟待完善,目前还需要用户通过阅读源码才能了解到少量API的用法,并且大部分样例仅仅支持grove专用的硬件模块,没有提供说明如何使用用户diy的电路模块。 我最终是参考"~/grove.py/grove"目录下的"grove_gpio.py"和"grove_led.py"两个源码文件,整理出一份 最简单操作GPIO代码。
import timefrom grove.gpio import GPIO led = GPIO(0, GPIO.OUT) while True: led.write(1) time.sleep(1) led.write(0) time.sleep(1) 至于GPIO引脚编号,相关的文档没有说明,我也没有在代码中深究。但是,考虑到这块板子在设计之初是要兼容树莓派的软件生态,我抱着试一试的心态,找了张树莓派的引脚图,对应连上我之前做实验用的 LED灯小电路,竟然能够工作了。

特别要注意,grove.gpio中对GPIO引脚的编号使用的是上表中的"BCM编码"。
通过I2C同PCA9685通信控制舵机 grove.py中也有支持i2c通信的模块, 例如可以通过如下代码引入"Bus"类
from grove.i2c import Bus grove.py中也提供了大量的i2c设备的样例代码,但没有支持PCA9685芯片的。我本意是打算参考样例代码写一个PCA9685芯片的类。grove.py中i2c设备类实现的套路是:先使用变量的方式定义I2C设计的寄存 器,然后实现类内的初始化,读取,写入等基本API,然后进一步封装功能。 首先用杜邦线将连线将Seeed STM32MP157C板子同PCA9685电路板连起来,并且将一个SG90舵机连到 PCA9685电路板上。

写代码之前,我还使用了i2cdetect工具扫描了一下i2c总线上的设备地址。 安装i2cdetect工具:
sudo apt-get install i2c-tools 执行扫描:
i2cdetect -y 1
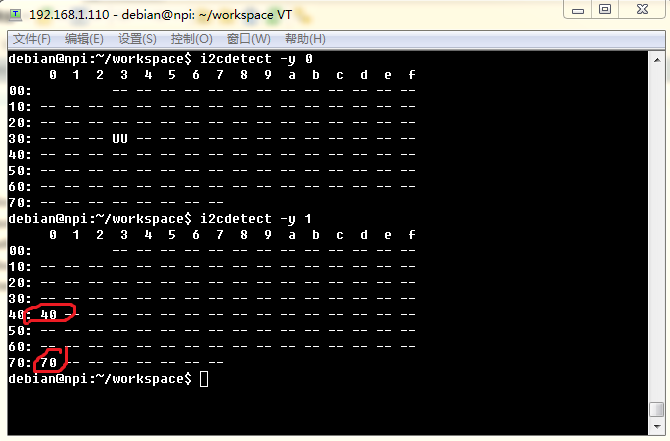
i2c0总线上没扫到设备,就在i2c1上试试,果然识别到了PCA9685芯片,其中"0x40"是芯片的读写访问地 址,"0x70"是一个广播地址,暂时不用管它。 我甚至已经编写好测试通信的代码:
import timefrom grove.i2c import Bus class GroveI2cPca9685: def __init__(self, bus=None, address=0x40): self.address = address self.bus = Bus(bus) def read_mode1(self): return self._read_byte(0x00) def read_mode2(self): return self._read_byte(0x01) # i2c bus. def _read_byte(self, reg): return self.bus.read_byte_data(self.address, reg) def main(): pca9685 = GroveI2cPca9685() print(pca9685.read_mode1()) print(pca9685.read_mode2()) if __name__ == '__main__':main() 用逻辑分析仪抓了i2c通信总线上的波形,看起来一切工作正常。

但我无意中在github上找到一个专门在Linux上驱动PCA9685芯片的项目"Adafruit_Python_PCA9685"。这是一个基于树莓派Linux的项目,不过,这块板子不就是兼容树莓派的软件么? 哈哈,省了我不少事情,直 接安装并使用。 可以通过pip安装"adafruit-pca9685"软件包:
sudo pip install adafruit-pca9685 当然, 也可以通过下载源码安装的方式安装:
sudo apt-get install git build-essential python-devcd ~ git clone https://github.com/adafruit/Adafruit_Python_PCA9685.gitcd Adafruit_Python_PCA9685sudo python setup.py install 然后基于 "Adafruit_Python_PCA9685/examples/simpletest.py"文件中的源码编写代码控制我自己的舵机:
from __future__ import divisionimport time # Import the PCA9685 module.import Adafruit_PCA9685 # Uncomment to enable debug output.#import logging#logging.basicConfig(level=logging.DEBUG) # Initialise the PCA9685 using the default address (0x40).pwm = Adafruit_PCA9685.PCA9685() # Alternatively specify a different address and/or bus:#pwm = Adafruit_PCA9685.PCA9685(address=0x41, busnum=2) # Configure min and max servo pulse lengthsservo_min = 150 # Min pulse length out of 4096servo_max = 620 # Max pulse length out of 4096 # Set frequency to 60hz, good for servos.pwm.set_pwm_freq(60) print('Moving servo on channel 15, press Ctrl-C to quit...')while True: # Move servo on channel 15 between extremes. pwm.set_pwm(15, 0, servo_min) time.sleep(1) pwm.set_pwm(15, 0, servo_max) time.sleep(1) 其中:
set_pwm_freq(60)函数设定了控制舵机的PWM方波信号频率为60Hz;
set_pwm()函数的第一个参数是通道号,我特别连了15号通道而不是0通道,就是担心此处的"0"同众 多的"0"混在一起。后面的两个参数分别是设置在一个周期中拉高电平和拉低电平的时间点,固定拉高电平的时间点为0,改变拉低电平的时间点就能控制舵机中电机的通电时间,从而控制舵机转动的角度。
运行程序后, 确实可以看到我的小舵机在左右摇头。Bingo! PS:我后来又看了一些使用PCA9685模块配合多个舵机和一些3D打印的机械结构设计制作的多足机器人的,我猜想控制算法多半已经有开源的方案,尤其在Linux平台上(树莓派)移植这么方便,我果断又下单买 了10个SG90舵机,又找了找开源的4足机器人机械结构的3D打印图纸,打算也搞一个小机器人玩玩。欲知 后事如何,那应该是另一篇文章里要介绍的内容了。
心得体会 Seeed STM32MP157C EVK板的软件开发者致力于兼容已经非常成熟的"树莓派"生态环境,通过Linux系 统对底层的电路系统进行了封装,因此有很多为"树莓派"开发的软件包可以直接运行在Seeed STM32MP157C EVK开发板上,这就为玩家提供了非常大的便利。 作为长期从事MCU开发的嵌入式系统工程师,这次"跨界"使用MPU,我从一个新的思路考虑开发手段。MCU开发的特点在于灵活性,可以为具体应用专门量身设计软硬件系统。而MPU开发过程对各个环节就 区分得更精细:底层软件开发者对底层电路系统和软件系统进行封装,向应用层开发者提供一个通用的开 发平台;应用层开发者不需要考虑底层的实现,基于跨平台的通用API编写应用程序。在通用平台(Linux)上 开发的软件可以在不同电路板上无缝复用。 新的开发体验让我惊喜不少,摆脱了对着寄存器手册和原理图的调试过程,直接专注于应用业务逻辑的开发,大幅缩短开发周期。python语言和有大量可用的工具软件包也让我可以不用每次实现功能组件时都 要重复"造轮子",或者小心地处理在别的芯片上移植过来的软件中存在的各种不兼容的问题。总之就是一个字,"爽" ! END
更多精彩视频分享请移步至硬禾学堂BBS论坛(也欢迎大家在本论坛里展开交流):https://bbs.eetree.cn/forum.php?mod=forumdisplay&fid=53
往期精彩
1. Funpack第一期开始Fund Back了,成功的同学都奔走相告,分享喜悦吧!
2. Funpack第一期精彩之二:Argon带你用mqtt连OneNET,漂移菌带你跑Linux和驱屏幕
责任编辑:xj
原文标题:看顶尖芯片公司工程师写总结报告(Funpack第一期精彩之三)
文章出处:【微信公众号:FPGA入门到精通】欢迎添加关注!文章转载请注明出处。
-
芯片
+关注
关注
453文章
50387浏览量
421782 -
工程师
+关注
关注
59文章
1566浏览量
68439 -
STM32
+关注
关注
2266文章
10871浏览量
354784
原文标题:看顶尖芯片公司工程师写总结报告(Funpack第一期精彩之三)
文章出处:【微信号:xiaojiaoyafpga,微信公众号:电子森林】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐




嵌入式软件工程师和硬件工程师的区别?









 工商网监
工商网监
评论