 用于驱动无传感器 BLDC 电机的优化控制方案
用于驱动无传感器 BLDC 电机的优化控制方案
我们将讨论用于驱动无传感器 BLDC 电机的优化控制方案,并展示微控制器外设互操作在这些应用中的重要性和优势。我们还将向您介绍一些可用于无传感器 BLDC 电机控制应用的最新微控制器。
随着对提高效率和可靠性的要求不断提高,无刷直流 (BLDC) 电机的使用在过去几年稳步增加。白色家电、汽车、冷却、航空航天、医疗和工业自动化等行业的变速电机应用现在正在使用 BLDC 电机,而不是其他类型的电机,例如有刷直流和交流感应电机。由于 BLDC 电机的驱动电子设备更加复杂,半导体行业已经为这些应用提供了更具成本效益的解决方案。
BLDC 电机有多种控制方法;使用哪种方法的决定取决于应用程序的要求。在基于传感器的 BLDC 控制应用中,霍尔效应元件集成到电机中,用于检测转子位置以实现驱动同步。通常使用三个霍尔传感器;每个传感器为 180° 的电动旋转提供高信号,为其他 180° 提供低信号。三个传感器相隔 120° 放置,从而将旋转分为六个阶段(即六步换向)。微控制器从这三个传感器读取此信息以确定转子的位置。在这个方案中,微控制器始终知道转子位置 - 即使在电机停止时 - 并且可以轻松确定控制回路所需的正确换向顺序。然而,这种方案伴随着霍尔效应传感器的成本损失——更不用说制造这些电机所需的额外组装和接线步骤。
相比之下,更具成本效益的无传感器控制方案采用反电动势信号检测,该信号由 BLDC 电机中未通电的相绕组产生(感应);该信号信息用于同步控制回路的时序。实际上,可以取消霍尔传感器,但推论是转子必须首先移动(以产生反电动势),然后才能获得任何位置信息。尽管这个特殊问题确实限制了可以使用无传感器控制方案的应用类型,但仍有许多有效的最终产品可以利用其较低的成本。例如,风扇和鼓风机是此类控制方案的绝佳选择。
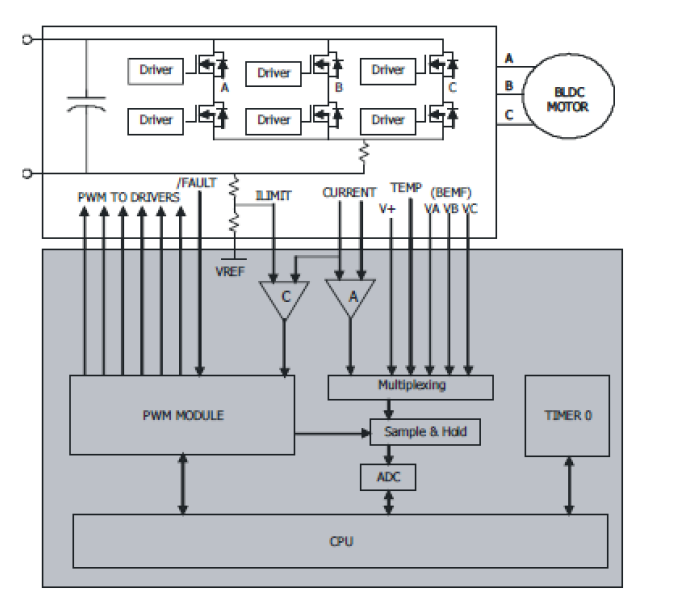
目前市场上有许多基于微控制器的解决方案,从简单的低成本 8 位设备到更高性能的 16 位和 32 位设备,它们都具有驱动无传感器 BLDC 电机所需的最少外围设备:一个 3相位脉宽调制器 (PWM) 用于控制电机相位、用于检测反电动势的 ADC 以及用于过流保护的比较器。
但是,由于集成在 MCU 上的外设集是将其定位到应用程序的关键,因此这些外设的互操作会极大地影响 MCU 在应用程序中的性能。由于自主外设能够在没有 CPU 干预的情况下提供应用程序所需的服务,因此 MIPS 等术语变得更加无意义。
例如,Zilog 最近发布了 Z16FMC 系列 16 位微控制器,除了 4 个链表 DMA 通道之外,它还提供 ADC 和定时器之间以及比较器和 PWM 输出之间的自动互操作。
BLDC 电机的无传感器控制需要具有快速中断响应的微控制器来实时处理 PWM 更新。对于需要高速串行通信、PWM 解调、复杂用户界面和显示控制等附加功能的应用,核心电机控制外设自主运行的能力变得至关重要。
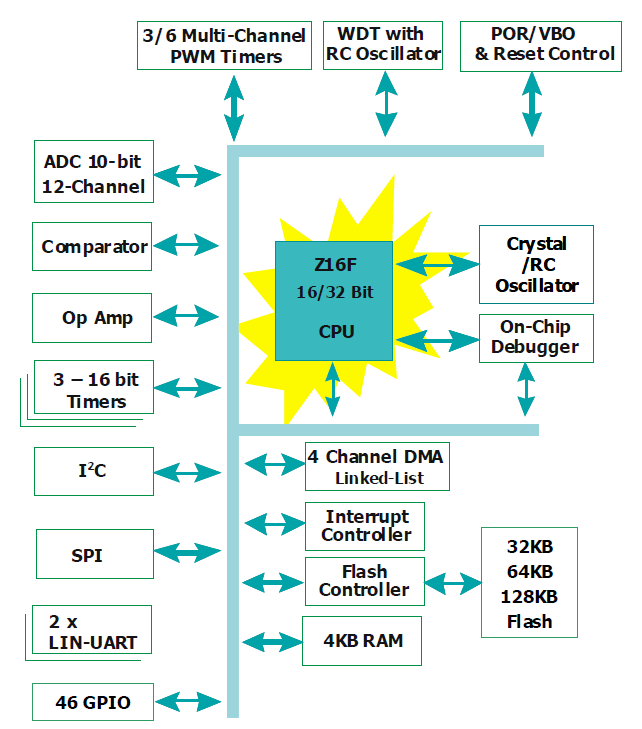
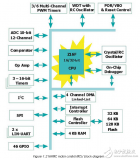
Z16FMC 电机控制 MCU 框图
Z16FMC MCU 特性
Z16FMC MCU 包括以下功能:
- 20 MHz ZNEO CPU
- 具有 16 位访问和在线编程 (ICP) 功能的 128 KB 内部闪存
- 具有 16 位访问权限的 4 KB 内部 RAM
- 允许无缝连接到外部数据存储器和外围设备的外部接口:
- ISA 兼容模式
- 12 通道、10 位模数转换器 (ADC)
- 运算放大器
- 模拟比较器
- 支持内部或外部 DMA 请求的 4 通道直接内存访问 (DMA) 控制器
- 一个全双工 9 位通用异步接收器/发送器 (UART),支持本地互连网络 (LIN) 和红外数据协会 (IrDA)
- 内部精密振荡器 (IPO)
- 内部集成电路 (I2C) 主/从控制器
- 增强型串行外设接口 (ESPI)
- 12 位脉宽调制 (PWM) 模块,具有三个互补对或六个独立的 PWM 输出,带有死区生成和故障跳闸输入
- 三个具有捕捉、比较和 PWM 功能的标准 16 位定时器
- 带内部 RC 振荡器的看门狗定时器 (WDT)
- 76 个通用输入/输出 (GPIO) 引脚
- 24 个具有可编程优先级的中断
- 片上调试器 (OCD)
- 电压掉电 (VBO) 保护
- 上电复位 (POR)
- 2.7 V 至 3.6 V 工作电压,具有 5 V 容限输入
- 0°C 至 +70°C 标准温度和 –40°C 至 +105°C 扩展温度工作范围
12 位 PWM 模块具有三个互补对或六个独立的 PWM 输出,支持可编程死区和故障保护跳闸输入以提供输出控制;而 ADC 的转换时间为 2 μs,可以由 PWM 模块自动触发。特殊的时间戳功能基于 ADC 采样/保持自动捕获 16 位定时器值。
外设互操作
集成在 MCU 上的外设集对于将其优化到应用程序至关重要,但这些外设的互操作会极大地影响 MCU 在应用程序中的性能。Z16FMC 系列提供链表 DMA 和 ADC 和定时器(时间戳功能)之间以及比较器和 PWM 输出(故障响应)之间的自动互操作。
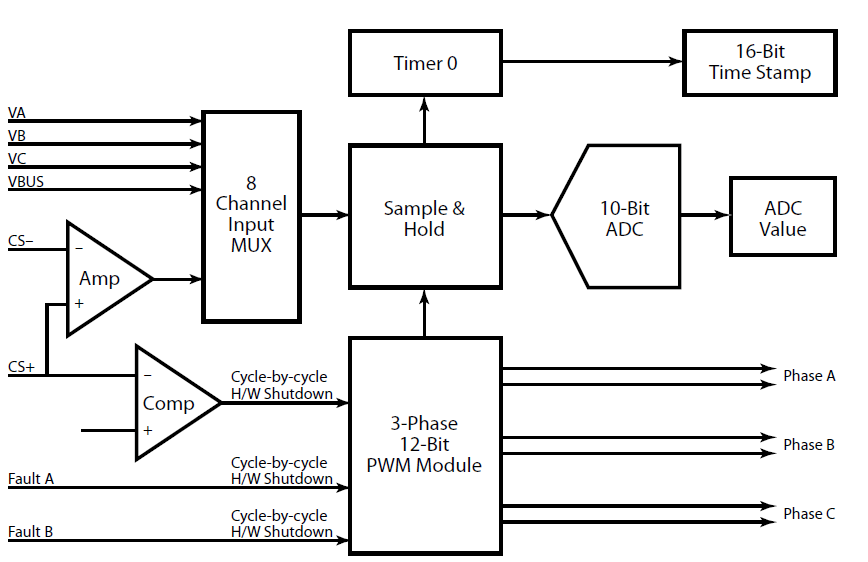
脉宽调制时序
链表DMA
直接内存访问是一种允许数据在独立于 CPU 的总线上传输的功能。Linked List DMA 通过使用提供源和目标信息的描述符以及指向下一个描述符的链接将这个简单的概念提升到另一个层次,以进一步降低 CPU 的开销和实时响应要求。
此外,Z16F 内核的多总线结构允许在从程序总线获取指令的同时通过数据总线传输数据,进一步降低了事务的开销。
在无传感器 BLDC 和更复杂的永磁同步电机和矢量控制应用中,有两种基本方法可以利用此功能:
当 CPU 处理所有其他系统级任务时,DMA 可用于自动更新电机控制 PWM 定时器。存储在 RAM 中的波表由 CPU 根据需要更新,但将数据发送到 PWM 模块的行为由 DMA 处理。结果,CPU 从以 PWM 频率的速率处理中断的任务中解放出来。
DMA 可用于卸载 CPU 并处理串行通信,以优化对 PWM 控制器的实时响应。
速度控制的时间戳功能
大多数微控制器至少使用一个专用比较器来检测输入反电动势电压信号的过零,以便可以同步和调整输出驱动脉冲以正确调节电机速度。另一种基于 Zilog 电机控制 MCU 的方法通过将 ADC 与定时器互连,从而无需此比较器。
在这种情况下,定时器用于在反电动势电压与总线电压交叉的点生成中断。在此中断期间,计时器继续在后台运行,并对反电动势和总线电压进行采样。计时器值根据电压(和电机方向)之间的差异进行更新,以将其锁定到电机的实际速度上。此事件用于确定换向点并更新 PWM 以有效调节电机速度。这种时间戳方法为电机在稳态下的平稳运行提供了一种非常简单且具有成本效益的解决方案。
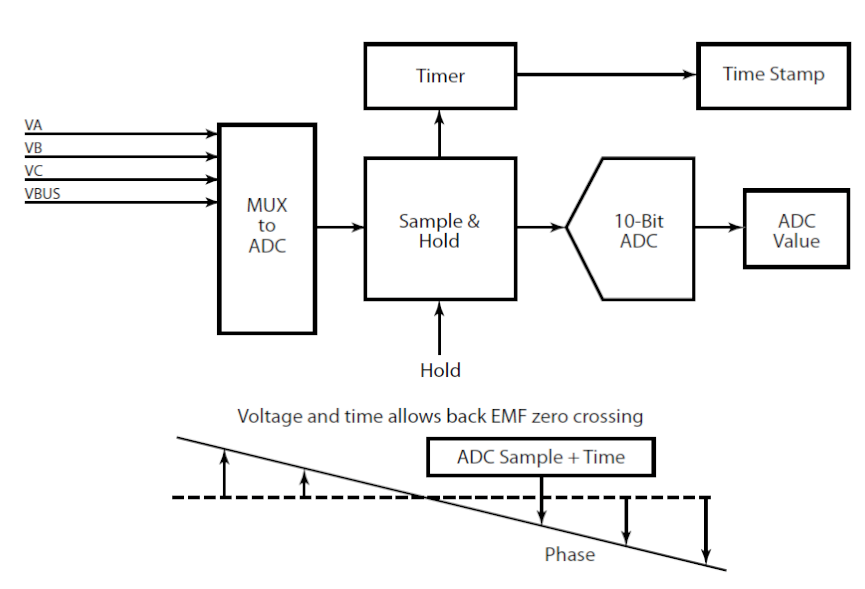
稳态速度控制的时间戳
故障响应
过流故障可能由许多不同的原因引起,有时具有破坏性。电机绕组短路、电机引线短路、机械驱动和连杆问题、转子卡住或负载变化、功率设备故障或失火以及许多其他问题都可能出现——其中一些是永久性的,一些只是暂时的。Z16FMC 系列具有直接耦合到 PWM 模块的过流比较器,从而保证可以真正以逐周期模式关闭。这种方法确保响应故障条件时的延迟最小。
在图 4 中,检测电阻器上的电流产生的电压提供给比较器的负输入端。您可以看到,随着检测电阻两端产生的电压增加到比较器阈值,PWM 输出立即被驱动为低电平,直到下一个周期。一旦电压低于阈值,下一个 PWM 周期就会正常生成。
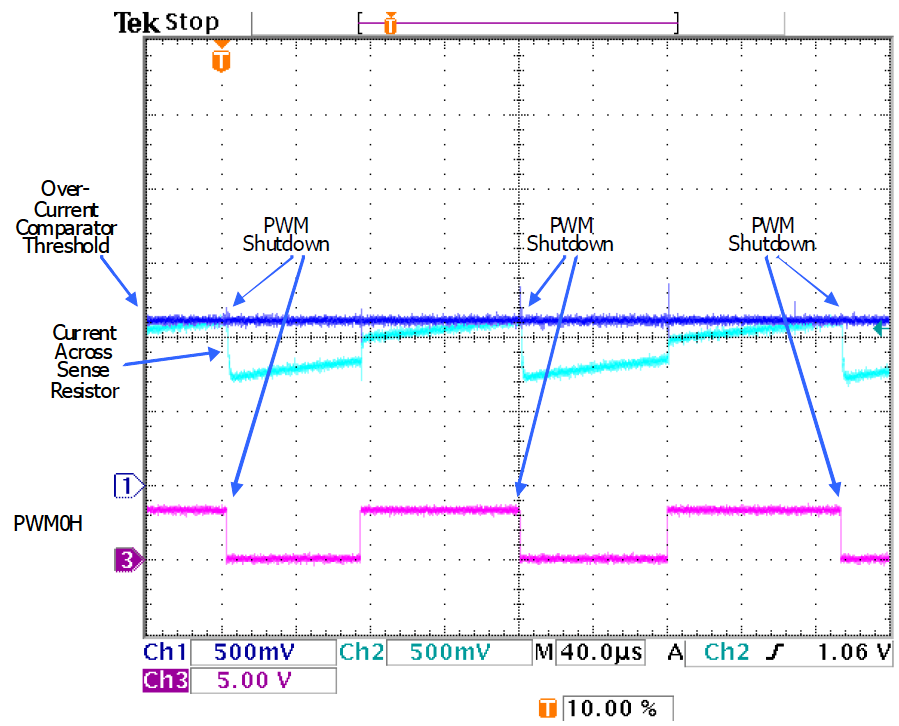
PWM 对过流故障的响应
升级路径
Z16FMC 电机控制系列提供了从 Z8FMC16100 系列向上迁移的绝佳路径,也适用于永磁同步电机 (PMSM) 和交流矢量控制应用。
开发套件
Zilog 提供的无传感器 BLDC 开发套件基于 Z16FMC28 器件并使用高效 IXYS MOSFET 为控制 30W 三相 BLDC 电机提供非常经济的解决方案。它随附以下内容:
- Z16FMC28系列MDS开发板
- BLDC 电机控制应用板
- 无刷直流 (BLDC) 电机
- 光隔离 USB 智能数据线
- 5V直流通用电源
- 带有完整 ANSI C 编译器的 Zilog Developer Studio II IDE
示例代码
所有源代码均随开发套件 (Z16FMC28200KITG) 一起提供,可从 Zilog 分销商处购买。有关详细信息,请访问 Zilog 网站:http://www.zilog.com。
参考设计操作
两个电机相在任何给定时间通电,并且在未通电的相绕组中产生反电动势电压。检测该感应电压的过零以同步后续闭环控制事件。Z8FMC16100 MCU 的时间戳功能可以稳健、高效地实现这一关键传感功能,而无需额外的比较器。反电动势感应算法基于锁相环 (PLL) 的实现。这种实现在启动期间特别有利,导致电机速度非常平稳地增加,以及根据命令几乎瞬时反转旋转方向。使用传统方法,在启动序列期间,向绕组通电,以便将转子置于已知的起始位置,然后进行换向并启动反电动势传感和控制。相比之下,基于 PLL 的方法可以从启动阶段开始锁定反电动势信号,而无需将转子初始放置在特定位置。此外,这种方法显着减少了电机在启动或方向反转期间的突然运动。
Z8FMC16100 参考设计
编辑:hfy
-
微控制器
+关注
关注
48文章
7482浏览量
151011 -
mcu
+关注
关注
146文章
16977浏览量
350214 -
脉宽调制器
+关注
关注
1文章
52浏览量
16987 -
无传感器
+关注
关注
0文章
42浏览量
13468 -
BLDC电机
+关注
关注
7文章
209浏览量
21442
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论