 基于汽车智能驾驶的多光谱激光雷达方案研究
基于汽车智能驾驶的多光谱激光雷达方案研究
作者:宋绍京,陈育伟,胡海江,胡金艳,龚玉梅,邵慧
在汽车智能驾驶系统中,激光雷达由于其独特的三维成像能力,成为场景探测感知传感器群组中不可或缺的组成部分。为提升单一波长激光雷达在物性探测分类和状态上的性能,借鉴多光谱探测具有物性探测能力的原理,论文对适用于汽车智能驾驶的多光谱激光雷达的波段选择进行了可行性研究,利用主成分分析法对智能驾驶中典型目标进行光谱计算及分析。
结合激光光源特性以及光电探测器的特性,综合多光谱激光雷达波段选择方法和智能驾驶应用场景中典型目标地物光谱特性,以及商用激光雷达的可获得性,得出了适用汽车智能驾驶的多光谱激光雷达的波长可以选择 808 nm、905 nm、1 064 nm、1 310 nm,并通过测试验证了多光谱激光雷达所选波长的有效性。
为了更好地利用激光雷达技术的环境观测能力,国内外学者针对融合单波长激光回波信号的强度信息和三维信息对数据进行分类开展了大量研究和探索,当前智能驾驶中使用的激光雷达在技术上的研究主要集中于单一波长方式工作。
为提升激光回波信号的强度信息和三维信息对数据进行分类的支持,不断地提高激光雷达点云密度,但这些研究并不能从根本上解决车载激光雷达单一波长所造成的物性探测能力上的不足,点云密度的增加虽可提高基于点云几何特征的物体识别能力,但也存在递减效应,且带来诸多额外的系统要求:
1)用于场景识别的算法日益复杂化,导致计算硬件需求剧烈增加;
2)激光雷达的功耗、复杂性、体积和成本大大增加,阻碍其大规模商用;
3)仅依靠三维特征,不足以有效识别复杂场景。因此,虽然激光雷达在三维空间信息获取方面具有突出优点,但由于激光雷达单一波长探测能力的限制,对环境信息中的物性分类、状态等方面的探测能力仍旧有待提高。
光谱成像技术不仅具有图像分辨能力,还具有光谱分辨能力,利用光谱成像技术不仅可以对待检测目标进行定性和定量分析,而且还能对其进行定位分析。针对目前智能驾驶环境观测中激光雷达的应用及其技术特点。
为了更好的挖掘出激光雷达对环境感知应用的潜力,使激光雷达技术在保留空间高分辨探测能力的同时,兼具对环境中物体物性感知的能力,因此,借鉴多、高光谱测量具有物性探测能力的原理,开展多光谱激光雷达对环境物体进行探测的技术研究将具有重要的研究价值和应用前景。
1. 激光雷达波长选择方法
激光波长的选择原则为:在波长数尽可能少的情况下,实现对不同目标分类或同种目标不同状态的判别,为多光谱激光雷达的激光器设置提供依据。
特征波长的选择算法经过长时间的发展,目前广泛使用的主要有主成分分析法(Principal Compo‐nent Analysis,PCA))、偏 最 小 二 乘 算 法(Partial Least Squares,PLS)、岭 回 归(Ridge Regression, RR)、逐步回归(Step Rise Regression,SRA)、多元线性回归(Multiple Linear Regression,MLR)等算法。
其中主成分分析法和偏最小二乘法是将分析波段内的光谱数据通过正交变换的方法将原来的多个参数转换为少数主成分的多元统计方法,对经转换得到的主成分再建立回归方程,与多元线性回归、逐步回归和岭回归相比,分析准确度有所提高,偏最小二乘法在确定最佳主成分数目上存在不足。
而主成分分析算法是将原始波段数据的各变量进行正交变换,把原始波段数据映射到一个新的空间,在新空间中,原始波段数据各变量的大部分信息经过变化后被压缩在较少的几个波段中,这几个波段称之为主成分。
实际上,这些主成分是原始波段数据各变量经过线性组合后形成的新变量,这些新变量尽可能多地表征了原始变量所包含的特征信息,且新变量之间互不相关,即正交。因此,在新变量即主成分数目的确定上存在着优势。即便变换后的各主成分的物理意义不明确,但主成分分析法却很好的实现了波段降维。
如果所探测目标成分的吸收谱线相互之间没有交叉与重叠,利用主成分分析方法可以取得较理想的结果。基于智能驾驶应用场景中典型目标光谱反射曲线的分析,基本上不存在峰值谱线相互交叉与重叠的情况,因此主成分分析法可以用于确定激光雷达波长的分析。
设对 m 个波长下的反射光谱重复进行 p 次测量,记为 :
成分累计贡献率越大,主成分解释原变量数据变化的能力越强,因此该贡献率是数据降维处理的重要指标。如果所选成分太多,会包含过多的测量噪声;如果所选成分过少,必然会丢失原始光谱数据中的部分特征信息。
该指标的选取根据不同的应用,选用的标准亦有所不同,因此选择累计贡献率 Vn 大于某一值(经验值 93%)的前 n 个主成分代替原来的光谱,以减小数据量,同时又可以很好的实现有效的波段降维,但是该方法变换后的主成分的物理意义不明确。
σ的大小反应了该波长下有多少信息被映射到了前 n 个主成分中,而在主成分信息中,本身就包含了原始光谱数据中的大部分特征信息,也就是说σ 本身也反映了该波长所包含的信息量,因此,通过结合累计贡献率和因子载荷 σ 可以确定主成分及相应的物理意义。
2. 智能驾驶应用场景中典型目标光谱特性测试及分析
智能驾驶应用场景随着用途的不同而有所不同,特定场景的智能驾驶项目主要集中在固定路线、封闭园区方向上,典型应用场景包括园区通勤、码头、矿山、仓储和物流等方面,这些应用场景中的目标相对比较简单,类别也比较固定。
目前,相比较特定场景下的智能驾驶,通用场景对于 L4 级别的智能驾驶仍然具有很大的挑战,在城市公开道路应用场景中的目标各种各样,类别也比较复杂,但总体而言,针对智能驾驶应用场景中的目标可以大致分为人类、植物、道路、建筑、车辆等目标。
研究行人光谱特性,主要研究穿着在人体上的衣服的光谱特性,常见人类所穿衣物多为棉织物和涤纶织物,根据图 1(a)所示光谱反射特性曲线可以看出,棉织物在可见光光谱区间根据棉织物的颜色不同,会有着比较明显不同的光谱曲线,但在光谱超过 800 nm 后的近红外波段里,棉织物的光谱反射特性基本一致的稳定在 60%左右,和棉织物的颜色基本上没有关系。
从图 1.( b)中所示光谱反射特性曲线可以看出,未染色和染色的光谱特性曲线差异性特别明显,但染色后的光谱特性曲线在光谱超过 800 nm 的近红外波段中的其反射率也基本上稳定在 60%左右。
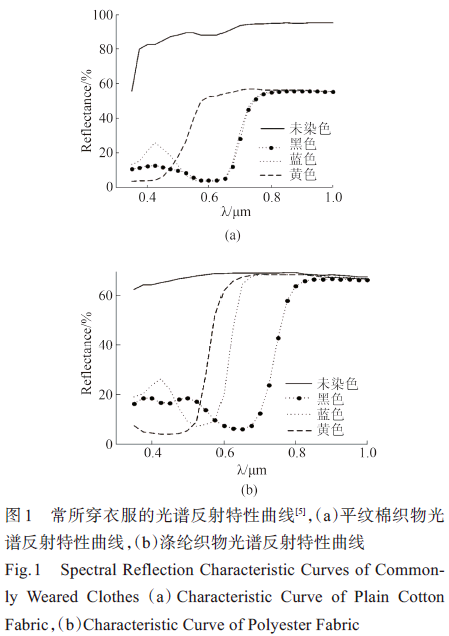
图 2 中所示为上海典型植物光谱反射特性曲线,其中在可见光的 550 nm 左右有一个反射波峰,在 680 nm 附近有一个吸收波峰,在 680 ~740 nm 之间,红边效应明显,各种植物的反射率急速增加。在近红外区域,道路两旁和道路中间作为绿化隔离带的植物,其反射率基本上处在 35%至 60%之间。
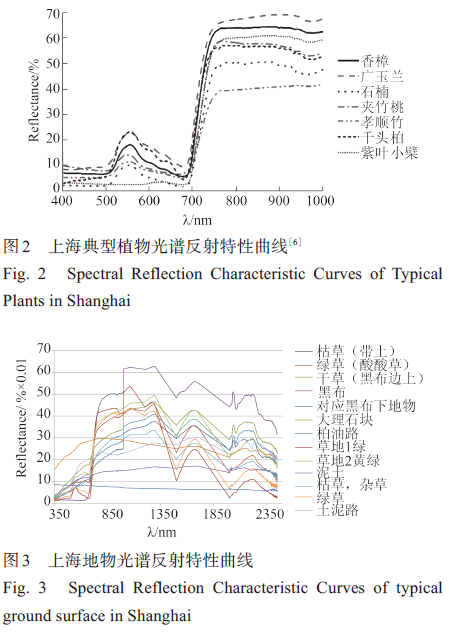
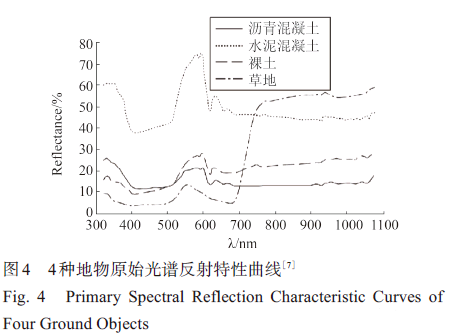
图 3 中部分曲线为上海本地采集的杂草光谱反射特性曲线,与图 2 所示上海植物的光谱特性一样,在 680 nm 处均有一个典型的吸收波峰,红边效应明显。
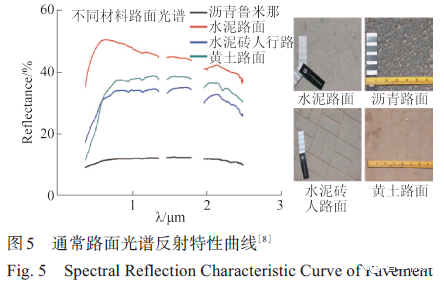
一旦进入近红外区域,草类的光谱反射率急速增加,超过 800 nm 后基本上稳定在 40%-50% 的反射率范围内,图 4 中所示的草地光谱反射特性曲线和图 3 中的数据基本一致。
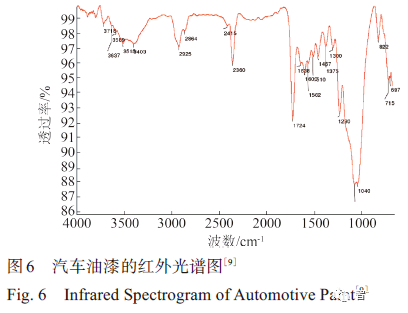
根据图 4 和图 5 所示的沥青混凝土道路的光谱特性曲线可知,沥青路面在近红外区域内光谱反射率基本上维持在 15% 左右。水泥路面在近红外区域内的光谱反射率基本上维持在 45% 左右。
而裸土土路地面由于各个区域中的土地成分差异性比较大,因此其光谱反射率也会存在着比较大的差异,从图 4 和图 5 中也能看出来光谱的反射率存在着较为明显的差异。
道路上行驶的机动车和非机动车,在外表面基本上都覆盖着油漆,不同厂家,不同品牌,它们采用的油漆工艺和成分并不完全一样,即便是同一厂家同一品牌,不同批次采用的油漆工艺和成分也有可能不一样。
因此,道路上行驶的车辆的车身油漆的光谱具有不同的特征,但根据图 6 所示,车辆在近红外波段里,其反射率超过 60%.
3. 激光雷达波长及光源的确定
通过对上述智能驾驶应用场景中各个目标物体的光谱特性分析,根据主成分分析法,针对 2 151 个波长,进行了 13 次测量,根据公式(1)~(4)计算进行波段的选取,再根据公式(7)计算各自的相对贡献率,得出前 4 个主成分相对的贡献率如表 1 所示。
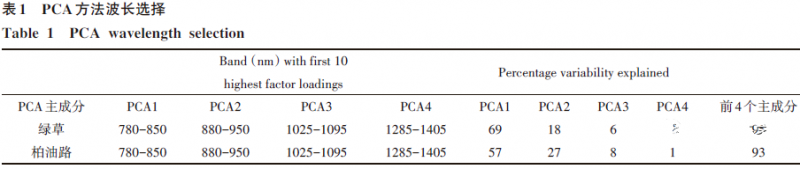
从表 1 可以看出,采用光谱能量空间变换形式进行主成分分析,前 4 个主成分解释了几乎 93%以上的光谱能量空间变换信息,从而得出适合智能驾驶激光雷达的敏感波段范围为 780~850 nm,880~950nm,1 025~1 095 nm,1 285~1 405 nm。
然而多光谱激光雷达波长选择的最终确定还需要全面考虑以下几个方面:
(1)从地物探测和识别能力来说主要考虑两个方面,一方面所选择的波段组合要保持尽可能多的目标信息量;另外一方面需要进行判别的目标在所选择的波段组合上类别可分性最强。
(2)对于激光雷达传感器的光谱波段选择,需要考虑以下四个因素:
a)激光雷达传感器的光谱敏感性;
b)研究目标的信息尽可能多地包含在所选光谱波段范围内,
c)在选择的波段范围内是否存在大气窗口;
d)在选择的波段范围对人眼是否有安全影响。
(3)多光谱激光雷达传感器在考虑所研究目标光谱辐射特性对传感器光谱波段选择的影响时,既要考虑研究目标在该波段的光谱特征及该波段对研究目标识别的能力,又要尽可能减小各波段间的相关性,增加信息量。
在满足以上 3 方面的基础上,多光谱激光雷达的波长设置还需要考虑激光光源特性以及光电探测器的特性,综合多光谱激光雷达波段选择方法和智能驾驶应用场景中典型目标地物光谱特性分析。
根据激光光源和大气影响因素两个方面的分析,采用 Class I 激光器安全级别,排除掉不适合的波段范围和波长,最终确定多光谱激光雷达的激光光源可选波长为 808 nm、905 nm、1 064 nm、1 310 nm。
其中 808 nm 的激光二极管为舞台激光灯中所常用,905 nm 为当前智能驾驶激光雷达(速腾聚创,Velo‐dyne)中所用,1 064 nm 为激光切割与焊接中所常用的波长,1 310 nm 为光通信常用波长。
4. 结论
通过主成分分析法对面向汽车智能驾驶在公开道路复杂应用场景中人类、植物、道路,建筑,车辆等目标的光谱数据进行计算与分析,考虑面向汽车智能驾驶的激光雷达光源特性及光电特性,综合目标地物光谱特性和产业现状,确定出面向汽车智能驾驶多光谱激光雷达的激光光源可选波长为 808nm、905 nm、1 064 nm、1 310 nm。
该波长组合选择,在保证对智能驾驶应用场景中各类目标物性有效探测进行分类的前提下,光谱通道数少,提高了光谱识别的效率,在实际系统设计中具有很大的指导意义,不仅能够满足物性分类探测,又能减少系统设计空间;不仅能节约系统搭建成本,又能保证数据处理和反演的效率。
编辑:hfy
-
光谱
+关注
关注
4文章
853浏览量
35506 -
智能驾驶
+关注
关注
3文章
2644浏览量
49090 -
激光雷达
+关注
关注
969文章
4057浏览量
190842
发布评论请先 登录
相关推荐
CES 2025激光雷达观察:“千线”激光雷达亮相,头部厂商布局具身智能

禾赛科技获东风汽车多个品牌激光雷达独家量产定点
一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
智能驾驶浪潮下,车载激光雷达行业深度剖析与未来展望
激光雷达的维护与故障排查技巧
激光雷达与纯视觉方案,哪个才是自动驾驶最优选?
一文看懂激光雷达


Luminar: 特斯拉是其最大激光雷达客户
激光雷达新形态!体积缩小60%,成本大幅下降,有望进入千元机时代?
零跑汽车与禾赛科技战略合作 激光雷达智能驾驶方案加速渗透






 工商网监
工商网监
评论