 如何选择选择最佳的数据转换器
如何选择选择最佳的数据转换器
演示了行业数据表的实际使用,以确定在存在系统错误(例如,数据转换器量化,时钟抖动,通道非线性以及输入和输出参考噪声)的情况下,可以实现哪些系统规格。着重介绍了有助于分析这些参数的设计工具,以及控制和减少其他系统噪声元素的建设性方法。
本文总结了Maxim关于消除信号链噪声的三部分说明。它介绍了有助于分析这些参数的设计工具,并着重介绍了控制和减少其他系统噪声元素的建设性方法。
这是关于信号链中噪声的三部分系列的最后一部分。在关于烦人的半导体噪声的第1部分中,我们确定了所有IC中发现的半导体噪声的起源和特征。我们解释了如何在器件数据手册中指定它,并说明了如何在数据手册中未指定的实际条件下估算参考电压的噪声。在第2部分“数据转换器中的噪声和失真”中,我们重点介绍了数据转换器特有的噪声和失真源。我们展示了如何在数据表中指定其噪声。
信号链中的噪声
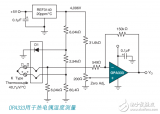
我们首先简要回顾一下本系列第1部分中涵盖的概念。噪声是电气系统中任何不受欢迎的电气现象。根据其来源,噪声可以分为信号链的外部(干扰)或内部(固有)噪声。在图1中,所有外部噪声源合并为一个项Vext,所有内部噪声源合并为一个项Vint。

信号链中的噪声。
噪声预算是在信号链中分配噪声,从而在输出端产生可接受的信噪比(SNR)。SNR定义为满量程RMS信号电平与总RMS噪声之比。因此,要确定信号链中可接受的噪声分布,必须评估其对总SNR的影响。为此,引入了数据转换器独有的两个规范:信噪比和失真(SINAD)比以及有效位数(ENOB)。
信噪比和失真
数据转换器将SNR的定义扩展到包括失真,并使用术语信噪比和失真(SINAD)。所增加的失真包括除直流之外的所有不希望有的频谱分量。SINAD是满量程RMS信号与所有其他噪声和失真分量的RMS总和之比。
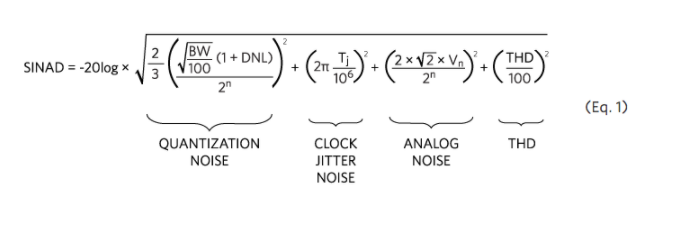
SINAD可以用量化噪声,样本抖动,模拟噪声和总谐波失真(THD)表示为:
信噪比和失真
在哪里:
N是分辨率(以位为单位)。
DNL是平均微分非线性,以LSB为单位。
BW是所使用的全部奈奎斯特带宽的分数,以百分比为单位。
Tj是采样周期的RMS抖动与正弦波信号的周期之比,以ppm为单位。
Vn是模拟噪声,以LSBRMS为单位。
THD是总谐波失真,以百分比表示。
SINAD简化为熟悉的“经验法则”公式:
SNR = 6.02N + 1.76dB LSBRMShspace {50mm}(式2)
时间:
体重= 100%
DNL = 0 LSB
Tj = 0ppmRMS
Vn = 0LSBRMS
总谐波失真= 0%
这些参数值一起描述了理想的数据转换器,其中唯一的噪声源是采样过程中固有的全带宽量化噪声。
在这种情况下,ENOB = N位。
编辑:hfy
-
信号链
+关注
关注
0文章
202浏览量
29830 -
数据转换器
+关注
关注
1文章
363浏览量
28010 -
电气系统
+关注
关注
1文章
354浏览量
24264
发布评论请先 登录
相关推荐
选择最佳的DC/DC转换器的五大秘诀
根据系统和技术选择转换器

为转换器时钟应用选择最佳器件

为您的救生医疗应用选择最佳DC-DC转换器

为给定噪声预算选择最佳数据转换器






 工商网监
工商网监
评论