 主动悬架台架试验上位机监测控制系统技术解析
主动悬架台架试验上位机监测控制系统技术解析
作者:张旭东、管继富、顾亮
本文所述基于PXI平台的主动悬架台架试验测控系统,该系统硬件易于配置,以PXI机箱为基础,配合不同PXI板卡即可实现多种功能,成本不高,功能全面,可扩展性、可升级性强,具有测试精度高,可靠性强等优点。"
挑战:
随着人们对车辆行驶平顺性,操纵稳定性的要求不断提高,希望当车辆载荷、行驶速度、路面状况等行驶条件发生变化时,车辆能自动调节悬架系统的刚度,因此对车辆主动悬架的需求日益增加。同时,业界对主动悬架系统的研究也更加深入广泛。对主动悬架系统来说,产生主动力的作用器种类多种多样,主动控制算法也不尽相同,因此,一个灵活方便,对各种机械结构及控制算法具有良好兼容性的主动悬架台架试验测控系统十分必要。
解决方案:
根据实际需要,本文建立了一个主动悬架台架试验上位机监测控制系统。利用该系统,可对各种主动悬架系统的综合性能进行全面测试,并可通过该上位机系统对主动悬架施加用户编写的各种控制算法,以验证控制效果,找出最佳控制方案,为主动悬架系统的开发和改进设计提供了设计及验证手段。
1. 系统平台概述
本主动悬架系统测控平台硬件部分是基PXI系统搭建的。PXI(PCI eXtensions for Instrumentation,面向仪器系统的PCI扩展)技术于1997年完成开发,并在 1998 年正式推出,它是为了满足日益增加的对复杂仪器系统的需求而推出的一种开放式工业标准。
PXI是一种坚固的基于 PC 的测量和自动化平台。PXI结合了 PCI 的电气总线特性与 CompactPCI 的坚固性、模块化及Eurocard机械封装的特性,并增加了专门的同步总线和主要软件特性。这使它成为测量和自动化系统的高性能、低成本运载平台。这些系统可用于诸如制造测试、军事和航空、机器测控、汽车生产及工业测试等各种领域中。
2. 测控系统平台硬件构架及特点
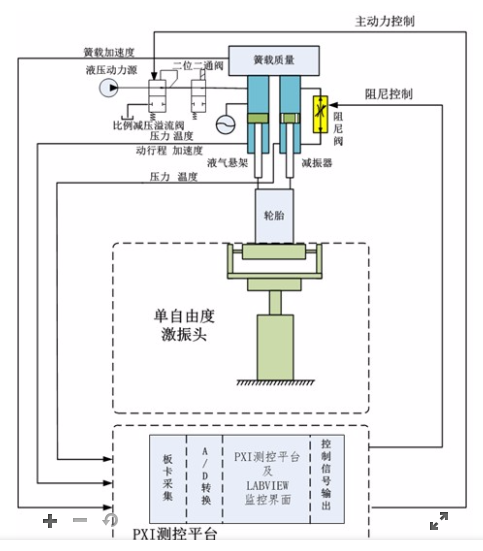
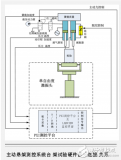
硬件上主要由六部分组成:上位机、信号预处理模块、传感器、液压试验台、主动悬架系统,PXI机箱及信号采集输出板卡。上位机用于测控仿真过程,分析和保存仿真结果,同时用于运行算法模型,输出控制信号对执行器进行相关控制;信号预处理模块用于为传感器提供恒流源,消除电压偏置,增加控制信号驱动能力;传感器包括压力传感器,位移传感器,加速度传感器,温度传感器,用以获取控制算法所需数据;液压试验台为主动悬架提供激励源,模拟实际道路工况;主动悬架系统相当于控制算法的执行机构,包括减振器、油气悬架、液压泵及控制液压管路通断的各个比例阀和开关阀等部件;上述各环节有机结合一个完整闭环系统,测控平台结构框架下图所示:
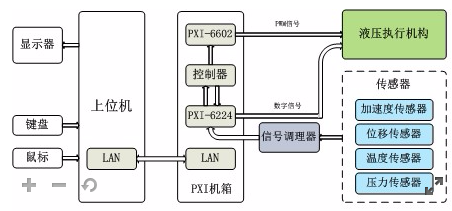
图 1 测控平台结构框架
上位机、控制器两者通过网线连接,上位机对仿真过程的测控通过共享变量来实现。
该监测系统可对试验涉及的各个设备进行集中配置,对所有设备的开停和调节,都可以在上位机上完成,使得试验人员操作轻松便捷,减轻了试验的劳动强度,提高了试验的效率。试验人员通过计算机显示屏,可以实时了解车辆悬架系统各个数据采集点上的温度、压力、加速度和动行程等数据,并进行有关测量分析,依此判断悬架系统性能及减振效果,并随时可以进行人工干预。
上位机是整个测控系统的核心,具有良好的人机交互界面,同时它也是测控软件的载体。NI的PXI机箱、控制器配合基于LabVIEW等开发的应用软件就构成了虚拟仪器测控平台,实现了全数字化采集测试分析功能,具有软硬件资源丰富、扩展性强、测试过程自动化、测试精度高、重复性好、操作方便、性价比高等优点。
在油气悬架及减振器缸内安装有温度传感器及压力传感器,在非簧载质量轴头及簧载质量上安装有加速度传感器,在非簧载质量与簧载质量间安装有拉线式位移传感器。传感器采集的信号通过信号调理模块消除偏置,传至PXI板卡的模拟信号接口,经模数转换后,传至上位机
主动悬架测控系统台架试验硬件部分连接关系如下图所示
该主动悬架台架试验测控系统输出的控制信号分为3路PWM信号及1路开关信号两种。PWM信号用以:1)驱动电机,带动液压泵,为整个主动悬架系统提供动力源;2)调节比例减压溢流阀开度,以实现对液压管路内压力值的控制;3)调节阻尼阀开度,实现对阻尼比的调节,达到调节阻尼力的目的。1路开关信号用以调节二位二通阀的通断,实现对主动悬架的开停功能。由PXI板卡输出的控制信号,首先经过信号预处理模块增加信号的驱动能力,再连接至被控部件。
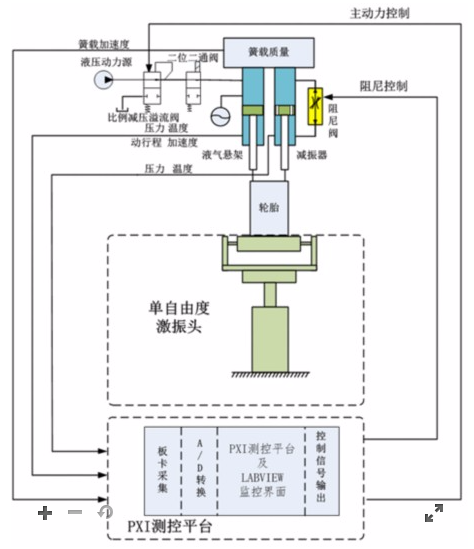
图2 主动悬架测控系连接关系
图3 主动悬架测控系统台架试验硬件部分连接关系
3. 测控系统平台软件设计及应用方法
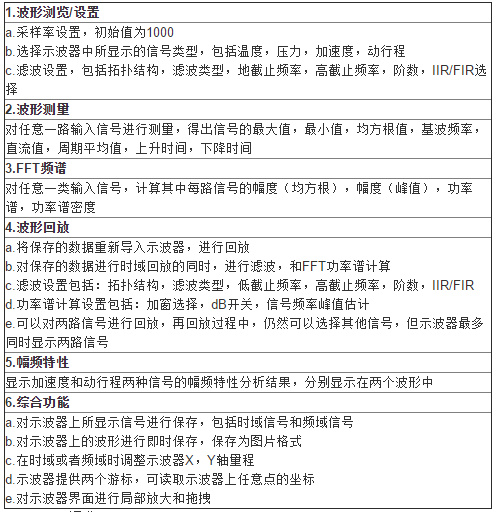
该上位机监测程序可以实现对台架试验数据的采集、记录、分析、运算等各项功能,并可将记录数据、分析结果及图表生成试验报告。试验系统的调试、测控均以达到自动化,具有很高可靠性,并且操作界面友好便捷,易于使用。该检测软件主要功能如下表所示
表1 软件功能表
3.1 操作界面
该台架试验测控系统软件部分基于LabVIEW虚拟仪器开发环境编写,可以实现多路信号采集、测量、分析,控制信号输出,测试数据保存、读取等功能,能完全应对各种主动或半主动悬架台架试验的要求,该操作界面与实验室常用示波器类似,易于上手
3. 2 数据采集、分析功能
测控系统对主动悬架控制算法所需的参数进行统一测量与分析,按照图1.3所示的连接关系,将温度、压力、加速度、位移等传感器测得信号经信号调理后的0~5V标准信号传给PXI系统,并显示在测控界面上。
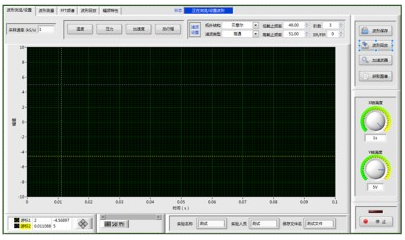
图4 上位机监测程序操作主界面
操作界面以选项卡的形式,将该系统分为波形浏览 /设置、波形测量、FFT频谱、波形回放和幅频特性分析五大功能,此外,系统还可根据操作者实际使用需求,调节波形图X,Y轴坐标量程,实时截取波形图当前波形并保存为 .dmp文件,编辑实验名称,实验人员及文件名等辅助功能。系统启动前,应首先对采样率进行设置,系统运行后,便可根据实际需要进行相应操作,实现对采集数据的浏览、测量、分析、记录。系统的操作主界面如下图所示。

图5 上位机程序滤波选项
测控平台对所测得的数据提供多种测量分析及数据处理选项:
A. 滤波设置
测控平台提供了丰富的滤波方式,可以针对不同情况进行相应的滤波设置,包含贝塞尔、Butterworth、Chebyshev、反Chebyshev、椭圆等5种滤波的拓扑结构,高通、低通、带通、带阻、平滑等5种滤波类型,并可对滤波器高低截止频率及滤波器阶数、IIR/FIR选择进行相应设置。
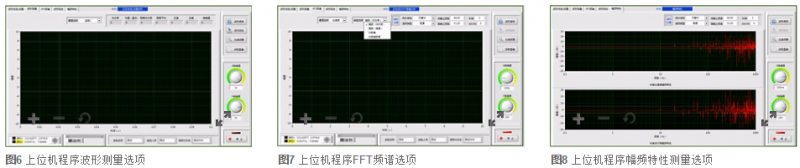
B. 波形测量
测控平台可对台架试验系统任意一路传感器信号进行测量,测试界面剂内容如下图所示
C. FFT频谱
测控平台可对加速度及动行程信号进行FFT幅值(均方根值)、FFT幅值(峰值)、功率谱及功率谱密度测量,并将测量结果以波形的形式显示。
D. 幅频特性分析
测控平台根据加速度传感器及位移传感器测得信号,计算得到车身加速度幅频特性及动行程幅频特性。
3.3 波形记录、回放功能
试验系统需要同时对7路数据进行采集,在进行算法调试的时候,往往试验周期很长,会根据需要对某一算法或产品进行多次试验。因此,在试验程序中设计了试验原始数据保存及回放功能。这一功能为试验数据的保存提供了方便、简单的操作,同时也尽可能避免因人为因素造成试验参数设定不统一,或者试验数据的遗漏,保证了重复试验的一致性。
试验测得的数据和试验过程中其它一些信息,比如各个测量通道的名称,总共采集的样本数,采样间隔,实验操作者姓名,试验日期等,都将在文件中予以保存。试验数据文件的文件名和保存路径,都可以有试验操作人员根据个人习惯来自定义编辑
试验数据回放界面如下图所示。为方便试验人员对以往试验数据分析对比,测控系统提供了数据回放功能,可将测得的原始数据导入系统,得到该数据对应的时域信号,加速度信号的功率谱密度,车身加速度幅频特性图和车身动行程幅频特性图。波形数据回放界面如下图所示。
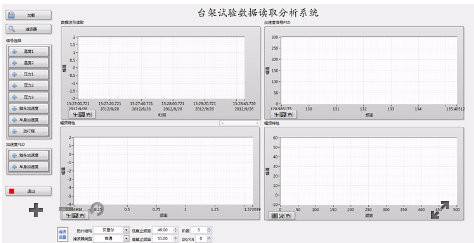
图9 上位机程序波形数据回放界面
3. 4 测控系统平台应用方法
1)系统初始化:当进入测试系统后,第一步就是进行系统的初始化,主要对传感器标定模块、信号采集模块、控制信号输出模块、测控系统监测模块、控制算法导入模块进行初始化,对出现的异常情况进行报错,为测控系统的运行做必要的准备工作。
2)设置相应测试参数及测试信息:包括采样信息,测试时间,测试人员,测试备注信息等。
3)传感器标定:任何传感器在使用开始时或使用一段时间后都会有误差。为了保证测试精度,必须对传感器进行标定,得出新的标定值。标定的方法是在有效测试范围内,测5个或更多的点,并输入相应的参数值,计算机根据输入的值,利用线性回归的方法进行计算,得到回归方程、最大标定值、最大电压值、绝对误差相对误差等,并将这些值存入相应的文件中。
4)将控制算法导入主动悬架台架试验测控系统,建立算法参数与硬件接口间的对应关系:首先将控制算法文件编译为动态链接库文件,然后将所编译的动态链接库文件导入测控系统,在系统中选择模型与硬件的通信速率以及使用到的硬件I/O端口,建立端口与算法参数的映射关系。
5)运行主动悬架台架试验测控系统:直至完成设定试验内容,系统停止工作,出发试验过程中出现系统异常造成的系统自动停机或人为急停。
6)对测量数据进行实时采集处理和分析:本系统包含对信号滤波拓扑结构,滤波类型,低截止频率,高截止频率,阶数,IIR/FIR等滤波功能设置,对所有信号的最大值,最小值,均方根值,基波频率,直流值,周期平均值,上升时间,下降时间进行运算,并可计算加速度和位移信号的幅值谱、均方根谱、功率谱及功率谱密度,可计算车辆簧载质量加速度幅频特性、动行程幅频特性。
7)对测量数据进行实时存储:主要是将采集的信号以LabVIEW特有的 .tdms文件格式储存在本地硬盘上,也可将数据储存在数据库中,便于日后分析或处理。
8)对测量数据进行实时显示及回放:主要是将采集的信号在时域和频域上进行实时显示;也可对保存的 .tdms文件从新读取,并显示在上位机终端上。通过多次试验结果的对比显示,可以方便的知道各个控制算法的优劣,为选择合适的控制算法提供依据。
9)试验完成后,可按照不同报表格式进行试验结果打印,综合评价控制算法的控制效果。
4. 结论
本文所述设计方案提供的测试系统不仅能满足主动悬架系统的测试要求,还可以完全兼容半主动及被动悬架的测试,测试过程自动化、精度高、重复性好,且较国外同等功能设备,价格低廉,硬件配置简单,可扩展性强。
编辑:hfy
-
控制信号
+关注
关注
0文章
1浏览量
537 -
PWM
+关注
关注
0文章
1浏览量
569 -
虚拟仪器
+关注
关注
0文章
1浏览量
492
发布评论请先 登录
相关推荐
北京测试架 北京测试架
悬挑式脚手架监理控制要点
电缆桥架的施工要点
基于PXI平台的主动悬架台架试验测控系统的介绍





 工商网监
工商网监
评论