 无人驾驶系统的设计与实现解决方案
无人驾驶系统的设计与实现解决方案
1.无人驾驶汽车的政策法规尚未完善
目前,无人驾驶汽车普及应用的最大挑战是大众对其接受度较低,对其安全性、可靠性的信任度较低。但因国家对无人驾驶汽车的政策法规尚未完善,无人驾驶汽车还不能在公开道路上行驶。
鉴于以上两点,国创中心主导,整合行业资源共同打造了一款 L4 的无人驾驶汽车,目前已经在首钢园区内稳定运行。系统总体方案如图 1 所示。

2.无人驾驶系统的设计与实现
无人驾驶系统是通过多种车载传感器获取车辆自身、周围障碍物及道路等与驾驶任务相关的环境信息,并将这些信息提供给决策规划,决策规划再根据感知和定位获取的环境信息、车辆状态和用户需求,规划出合适的路径,然后通过这些信息来控制自车的行驶状态。
不同的自动驾驶级别和运营环境,自动驾驶的实现方案也不同。本项目针对首钢园区建筑物高大、树木繁茂较多、路况复杂的特点,提出了基于 3 个激光雷达、1 个毫米波雷达、2 个摄像头、12 个超声波雷达和 1 套组合导航单元的传感器解决方案。传感器安装位置如图 2 所示。
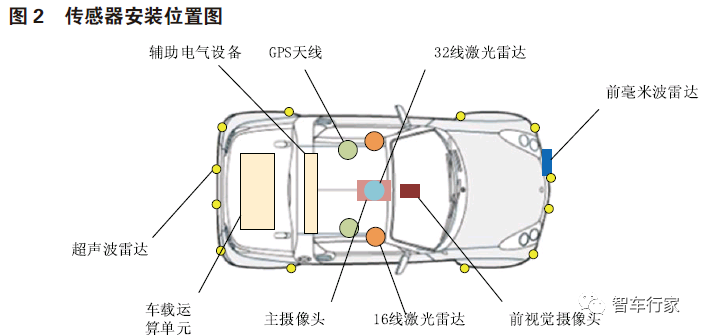
2.1传感器
3 个激光雷达中的 32 线激光雷达布置于车辆顶部,2 枚 16 线激光雷达布置于车辆顶部两侧。用于检测车辆周围的环境信息和障碍物信息,获取障碍物的尺寸和方位信息。具有测距精度高,方位准确,测量范围广、抗干扰能力强等优点。
毫米波雷达采用 77GHz 中长距雷达,布置在车辆前保险杠内侧。用于检测车辆前方的运动目标,获取目标的速度和方位信息。具有较好的测速测距能力,且受外界影响较小,可以全天候工作。
主摄像头布置于车辆顶部,前视觉摄像头粘贴于挡风玻璃内侧中部,用于检测车辆前方障碍物信息、道路信息、标识牌信息和交通灯信息,获取障碍物的类型和道路环境信息。具有对障碍物分类准确的优点。
12 枚超声波雷达布置在车辆四周(前后 4+4,左右 2+2),用于检测车辆周围近距离障碍物信息,确保无人驾驶车辆可以自主出入库。
2 个 GPS 天线布置在车辆顶部,1 个惯性导航单元布置于车辆后备箱内。用于获取车辆的位姿和定位信息。
2.2无人驾驶系统软件架构
本项目以纯电动汽车为平台,搭载上述 5 种传感器,实现道路环境信息准确感知,并通过多传感器信息融合技术将这些信息进行集成,降低误判概率,提高信息输出的稳定性和准确性。
设计开发了多传感器融合算法、定位组合算法、决策规划算法和车辆控制算法,实现了开放园区和封闭园区道路上的自主跟车、自主超车与并线、车道保持、交通路口自动通行、障碍物规避等功能,编写了无人驾驶测试用例,制定了无人驾驶测试规范,完成了无人驾驶系统的测试。
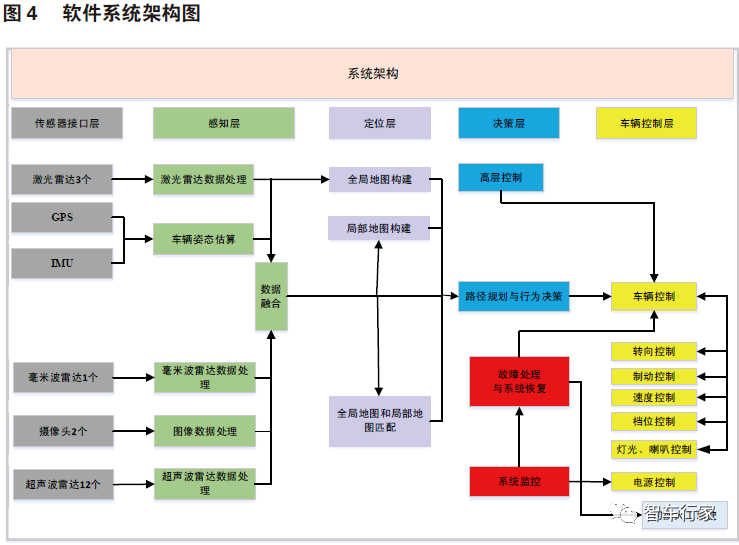
为了达成该目的,将无人驾驶系统软件架构分为传感器接口层、感知层、定位层、决策层和车辆控制层。
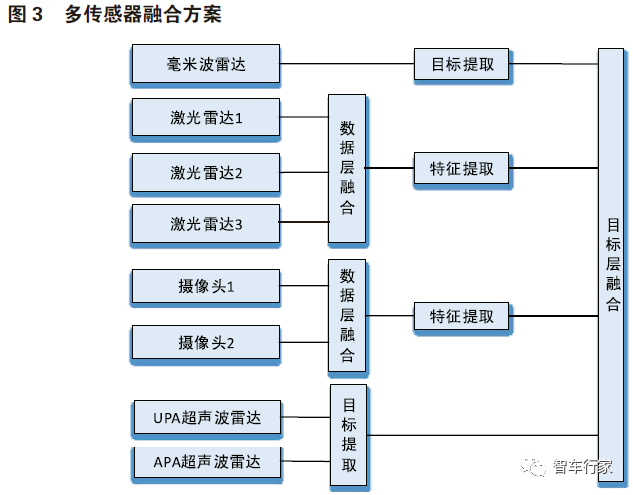
传感器接口层包括各种外围传感器的输入。感知层收集各种传感器的数据,进行多层次、多空间的信息互补和优化组合处理,最终实现对周围环境的全方位感知。多传感器融合方案如图 3 所示。
定位层:根据激光雷达和组合导航单元的数据信息构建出全局地图。激光雷达、摄像头、毫米波雷达、超声波雷达的感知结果融合处理后建立以行驶车辆为中心的感知局部地图。并通过 GPS 信息、车辆位置和姿态信息的叠加。提供一种直观了解行车环境各种信息处理结果的实时综合地图。
决策层:在全局环境中,依靠路网、任务和定位信息生成一条最优全局路径;在局部环境中,依靠感知信息并在交通规则的约束下,实时推理出合理的驾驶行为,并生成安全可行驶的区域;
根据车速、道路复杂度生成平滑的可能行驶路线;分析静态、动态障碍物和交通规程形成局部路径规划,并形成驾驶策略决策发送至车辆控制层。同时对系统故障进行处理和恢复并接受高层控制等。
车辆控制层:根据路径规划结果和车辆内部的各种传感器信息,生成对车辆档位、油门、方向的控制命令,保持车辆平稳高速行驶,实现自主驾驶。
软件系统架构图如图 4 所示。
3.人 - 车 - 云三位一体的人机交互系统的设计与实现
人机交互系统是无人驾驶汽车投入商用的一道门槛,它对于无人驾驶汽车产业和用户来说都具有重要意义 [2]。目前用户对无人驾驶汽车仍处于新奇和怀疑的态度,还远远无法达到信任和接受的程度。在这样的背景下,无人驾驶汽车的人机界面就变得更为重要。
它需要成为用户与汽车之间沟通的桥梁,让用户了解汽车的实时状况,为用户创造安全的驾驶体验;也需要帮助用户建立起与无人驾驶汽车之间的信任感,使用户更加和谐的从传统汽车过渡到无人驾驶时代 [3]。
本项目人机交互子系统的研究目标正是通过对无人驾驶汽车人机交互界面的合理设计,满足用户的驾乘需求,为用户创造出安全便捷的驾乘体验。
3.1功能概述
无人驾驶车辆运行在园区内固定的行驶路线上,沿线会设置一系列的站点,每个站点的站牌上贴有约车二维码,位于任一站点附近的乘客可通过扫描站牌上的二维码进入约车界面,选择起始地和目的地,点击确定后即下单成功。
订单直接发送到云端,云端根据订单情况对正在运营的无人驾驶车辆进行调度,同时发送订单的运营路线到手机端和车载端,无人驾驶车按照接收到的运营路线去起始地接乘客,并送达指定的目的地,用户可根据驾乘体验对服务进行评价,至此订单完成。
3.2系统设计
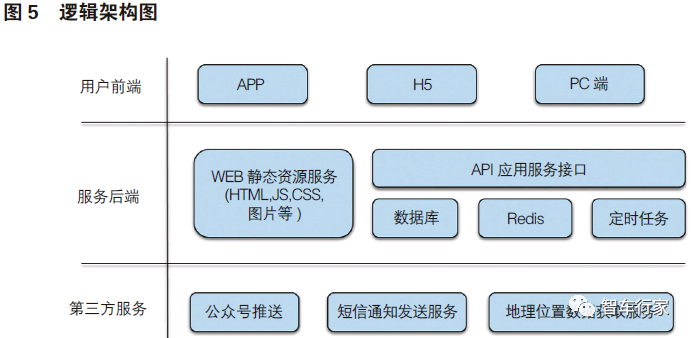
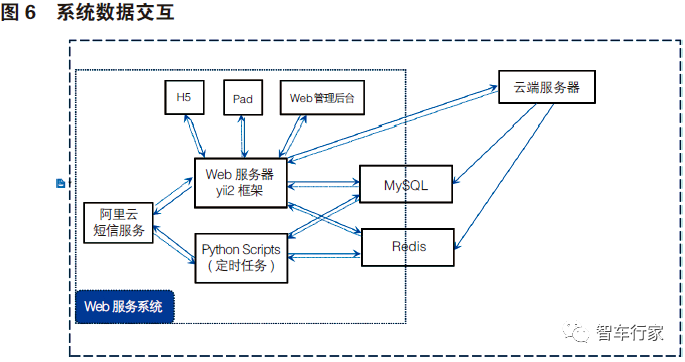
此系统采用 B/S,C/S 多层架构,支持多种网络接入方式用户端采用浏览器, H5 和 APP 的方式,减少系统安装维护的工作量;用户使用简单,无需培训;系统扩展容易;支持远程业务处理。业务逻辑在服务器端运行,充分利用了服务器的处理能力;
通过结合 Web 负载均衡、组件负载均衡等,可以通过横向扩充服务器,使得系统能够处理更多的服务请求,满足不断增长的系统性能需求。人机交互子系统的逻辑架构图如图 5 所示,系统交互数据如图 6 所示。
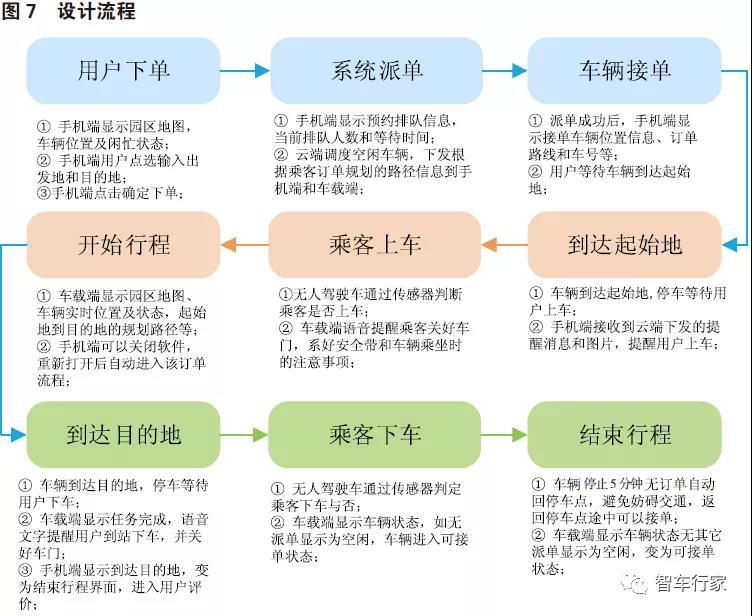
4.设计流程构建 立足于以用户为中心的设计思想,将无人驾驶汽车的信息尽量透明化,帮助用户轻松判断汽车的可靠性,从而建立起对汽车的任感,促进大众对无人驾驶汽车的接受度,促进无人驾驶汽车走入人们生活。设计流程如图 7 所示。
结语
随着互联网技术和人工智能技术的迅速发展,完全无人驾驶已不是遥不可及。无人驾驶技术的落地除却传感器、计算平台等技术本身的局限性外,也有赖于大众对无人驾驶技术的认可和信任度。
本文从推动无人驾驶落地的角度出发,采用以用户为中心的设计理念,借助科技冬奥的使用场景,设计与实现了无人驾驶及其运营系统。
未来随着智能网联时代的全面到来,无人驾驶汽车将覆盖更多人群,其实现方式也从单车智能发展为车路协同,人机交互方式将不断创新,落地场景将更加丰富。
参考文献:
[1] 张茜 . 无人驾驶系统的设计与实现 [J]. 电子技术与软件工程, 2019(18).
[2] 董长青, 丁田妹, 黄晓延,et al. 无人驾驶的人机交互方式研究综述[J]. 时代汽车, 2017(14):11-12.
[3] 李小凡 . 全自动无人驾驶汽车人机界面概念设计 [D]. 东南大学,2018.
编辑:hfy
-
传感器
+关注
关注
2550文章
51000浏览量
752957 -
人工智能
+关注
关注
1791文章
47146浏览量
238119 -
无人驾驶
+关注
关注
98文章
4053浏览量
120424 -
自动驾驶
+关注
关注
784文章
13779浏览量
166346 -
超声波雷达
+关注
关注
1文章
66浏览量
4248
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论