 如何选择Mosfet驱动程序进行运动控制
如何选择Mosfet驱动程序进行运动控制
工程师经常使用栅极驱动器或“预驱动器” IC以及N沟道功率MOSFET来提供驱动电动机所需的高电流。重要的是要考虑与选择驱动器IC,MOSFET以及在某些情况下相关的无源组件有关的所有设计注意事项。通常,对该过程的了解不多,实现方式也不尽人意。让我们开始讨论为预驱动器/功率MOSFET电路选择组件的简单方法,以及由此产生的系统性能。
设计直流电动机驱动器(无论是有刷电动机还是三相无刷电动机),电动机的特性将决定驱动器的设计细节。有助于定义驱动器设计的两个主要因素是电动机的工作电压和电流要求。
但是,这些参数并不像人们最初想到的那么简单。电机通常具有给定的电压和电流额定值,实际运行值可能会根据应用情况而与这些额定值不同。施加的电压决定了电动机的速度。电动机所需的电流取决于施加在电动机上的转矩。因此,驱动器可能需要设计也可能不需要按照电动机的完整规格进行设计。
您可以使用通常在电机数据表中给出的速度常数和转矩常数来估算特定应用所需的电压和电流。驱动器必须使用至少与从电动机上获得所需速度所需的电压一样高的电压供电,但是电源电压通常取决于系统可用的电压。通常,最大电流需求由使用机械负载启动电动机所需的转矩来设置。
选择MOSFET
确保选择额定功率至少为电源电压和电机所需最大电流的功率MOSFET。请记住,有必要留一些余量。
选择一个漏极至源极额定电压(VDS)至少比电源电压高20%的MOSFET。在某些情况下,尤其是在电流较大,转矩步长较大且电源控制不佳的系统中,您可能需要的裕度是电源电压的两倍。
当然,MOSFET的额定电流必须足够高,以提供电动机所需的峰值电流,但通常在散热方面占主导地位。MOSFET会耗散功率并在漏极-源极电阻RDS(ON)中产生热量。包括环境温度和MOSFET可用的任何散热在内的热约束设定了可以消耗多少功率的限制。该最大允许功耗驱动基于RDS(ON)值的MOSFET选择。
一旦找到必要的额定电压和RDS(ON),请务必考虑总栅极电荷(QG)。栅极电荷是衡量打开和关闭MOSFET需要多少电荷的度量。QG较低的MOSFET更易于驱动。与较低的QG相比,它在较低的栅极驱动电流下切换速度更快。
栅极驱动电流和上升/下降时间
可以将功率MOSFET的栅极视为栅极和源极端子之间的非线性电容。即使栅极不传导直流电流,它也确实需要电流来对栅极电容进行充电和放电,从而导通和关断MOSFET。提供给栅极的电流量决定了完全导通MOSFET所花费的时间。同样,当电流从栅极拉出时,该电流量将设置MOSFET的关断时间。
要了解驱动栅极所需的条件,您需要知道MOSFET的开关速度。您必须在低开关损耗(需要快速的上升和下降时间)和低EMI(需要缓慢的上升和下降时间)之间进行设计权衡。此外,脉宽调制(PWM)频率以及所需的最小和最大占空比限制了开关速度的时间。例如,在20 kHz PWM频率下,占空比为1%时需要产生500 ns的脉冲。这需要数百纳秒或更短的上升和下降时间。
确定所需的上升/下降时间后,计算所需的栅极驱动电流。可以估计为QG/t,其中QG是总栅极电荷,t是所需的上升/下降时间。请注意,这是在整个上升/下降时间内需要驱动的电流量-实际上,由于大多数栅极驱动器不提供恒定电流,因此栅极驱动电流通常会在这段时间内有所变化。
如果将恒定电流输送到栅极,则栅极处的电压不是线性斜率,而是线性斜率。在MOSFET切换期间,它达到一个平稳状态(图1)。这被称为“米勒高原”,是由栅极-漏极电容引起的。当漏极过渡时,此电容需要电流充电,因此栅极-源极电容的充电会变慢。提供给栅极充电的电流越低,转换完成所需的时间就越长。
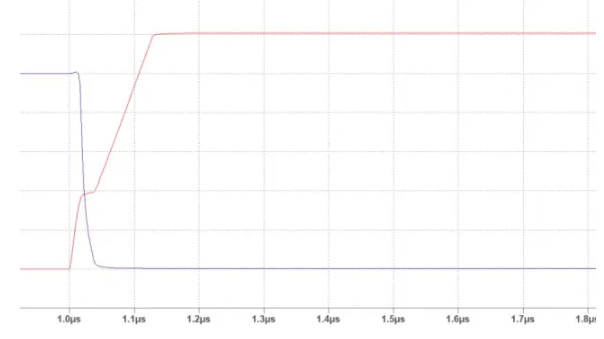
图1:1A恒流栅极驱动器(100 nC –红色=栅极,紫色=漏极,200ns / div。)
图2显示了使用具有12Ω串联电阻的12 V恒压栅极驱动器时的波形。高原仍然存在,栅极达到12 V所需的时间更长,但漏极的开关时间几乎相同。
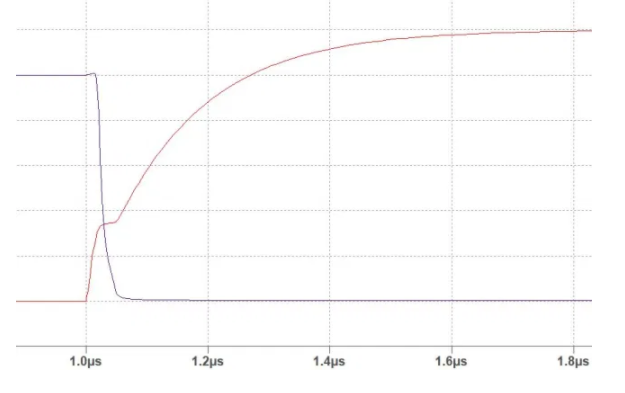
图2:具有12串联电阻的12V栅极驱动器(100 nC –红色=栅极,紫色=漏极,200ns / div。)
选择前置驱动器IC
一旦知道所需的最小栅极驱动电流,就选择可以支持它的栅极驱动器(预驱动器)IC。这些零件的种类繁多,具有不同数量的通道,栅极驱动电流功能和电源电压范围。某些部分还提供其他集成功能,例如电流检测放大器和保护电路。
许多半导体供应商都提供预驱动器IC,这些供应商生产用于电源管理的产品,包括MPS。这些供应商提供了专为DC电动机驱动器设计的各种单通道和三通道预驱动器IC,包括三通道60V和100V系列以及单相100V器件。
一些预驱动器IC使用线性稳压器,电荷泵和/或自举电容器从主电动机电源内部生成所需的栅极驱动电压。其他一些则需要单独的栅极驱动电源。要以100%的占空比工作(长时间输出高电平),请选择带有内部电荷泵的预驱动器,以使高端栅极长时间保持导通状态。仅依靠自举电路驱动高端的预驱动器只能在有限的时间内保持高端MOSFET的导通,因为一段时间后漏电流会耗尽自举电容。
栅极驱动器必须至少能够提供实现上述所需的上升和下降时间所需的电流量,但是也可以使用具有更大电流能力的驱动器。一些驱动器IC提供了一种通过改变零件内部栅极驱动的数量来调节上升和下降时间(也称为“转换速率调节”)的方法。当使用不具有内置压摆率调节功能的部件时,用户可以在栅极驱动器输出和MOSFET栅极之间插入电阻。这限制了栅极电流,并减慢了上升和下降时间。
编辑:hfy
-
MOSFET
+关注
关注
147文章
7202浏览量
213660 -
驱动器IC
+关注
关注
0文章
41浏览量
14710 -
无刷电动机
+关注
关注
1文章
19浏览量
8676 -
栅极驱动器
+关注
关注
8文章
748浏览量
39015
发布评论请先 登录
相关推荐

pcie设备驱动程序安装步骤
硬盘电机怎么驱动程序?它有什么典型特征?
Linux设备驱动程序分类有哪些
linux驱动程序如何加载进内核
linux驱动程序主要有哪些功能
linux驱动程序的编译方法是什么
linux驱动程序运行在什么空间

plc可以进行运动控制吗
为什么Ftdi驱动程序无法工作?
实现机器人操作系统——ADI Trinamic电机控制器ROS1驱动程序简介

怎么编写Framebuffer驱动程序






 工商网监
工商网监
评论