 一种能够将电能转换为机械能系统的电驱动器技术解析
一种能够将电能转换为机械能系统的电驱动器技术解析
作者:Maurizio Di Paolo Emilio
机器和设备的自主移动一直是人类的梦想。过去的梦想实现了,这要归功于对机械充满热情的天才机械的发现和发明。当然,今天的技术允许在宏观力学和微观力学领域中使用高度复杂的驱动器。这些驱动器广泛用于工业和民用应用中(见图1)。它们涉及一个称为执行器的动力机构,该动力机构能够产生受其他机械或电子设备控制的机械功。为了确保高质量的工作,必须配备高质量的电动机驱动器。一些解决方案包括使用集电电动机,异步电动机,同步电动机,步进电动机和磁阻电机。它们各自具有特定的特性,具体取决于系统本身执行的目的。自动化领域还包括运动控制,它以受控方式研究机器运动部件中涉及的子系统。在开环系统中,控制器通过放大器将命令发送到电动机,但它不会意识到运动。但是,在闭环系统中,控制器会收到有关系统测量值的答案,以进行更正并补偿任何错误。
电动起子
它是由电动机,电源电路以及命令和控制电路组成的系统,用于调节轴的扭矩,速度或位置。
驱动器可以具有不可调节的速度和可调节的速度。前者利用了发动机的固有特性。后者允许对能源及其完成的工作进行明智和经济的管理。速度变化以不同的方式发生。
运动控制
它没有描述特定的机械或电子组件,而是代表一组单独的组件,它们一起工作以在机器或系统中产生受控的运动。”
关键组件通常包括:
- 运动控制器;
- 具有放大能量目的的驱动器;
执行器
控制器是在控制系统中充当“大脑”的电子设备。所用控制器的数量根据需要控制的各个过程的数量而有所不同。对于复杂的系统,可能会有许多控制器。这些控制器中的每一个都可以向电动机发送命令,并同时从执行器本身接收指令。驱动器充当控制器和电机之间的中介。它解释来自控制器的信号,并提供正确的功率水平以转发给电动机,以获得所需的运动。运动控制系统中使用的电动机可以采用多种形式,并可以用于各种应用。它们的主要功能是接收电输入并将其转换为机械运动。
执行器
运动控制的最终目标是对执行器执行物理动作,该动作将按照应用程序要求的术语和方式进行重现(参见图2)。无需深入探讨该主题,可以通过以下方式执行驱动器:
- 步进电动机,其工作方式与普通电动机类似。磁铁的内部布置使轴可以单步旋转。例如,步进电机的完整匝数可分为1个度数的360个步数。这样,内轴的定位非常精确。
- 线性执行器,将旋转运动转换为线性运动;
- 伺服器,可精确控制角度运动。
智能驱动程序
当然,技术正在取得长足进步,并且该部门也受到了很大的影响。新的尖端,功能强大的产品可带来旨在提高效率,尤其是安全性和舒适性的结果。新技术可以实现快速精确的定位,以及在智能系统网络中同步的动态运动。另外,这些系统不是彼此独立的,而是与其他组件通信,以允许在一般系统环境中进行信号处理和集成测量。如今,可以执行非常逼真的动作,从而使人机与人造机器之间实现了完美的互动。
效率
该测量表示电动机将电能转换为机械能的效率。高效率对应于较低的电力消耗价格。
扭力
扭矩在选择发动机时也起着决定性的作用。它比功率更重要,因为它表示发动机在所有转速下都能保证的性能。
摆脱
浪涌电流是一个在任何领域都不能忽视的问题。当发动机启动时(以及在涉及打开和关闭的任何过渡阶段),电动机吸收的电流甚至比正常稳态电流大十倍。起点导致系统问题。实际上,有必要将电源线的尺寸和开关的尺寸设置为比正常操作所需的尺寸大得多的值。因此,有几种方法可以尝试减少此问题。例如,许多设备使用可变的阻抗和电阻,或者它们可以轻柔地启动,然后逐渐增加工作条件。逆变器在能量分配中也起着非常重要的作用。
启动引擎
要使电动机开始旋转,启动扭矩必须大于阻力扭矩。最初,当转子停止并提供电压时,它处于短路状态,并且在最初的瞬间,它会吸收来自电源线的最大电流。
速度设定
自动化管理中最关键的方面之一是能够不断改变执行器产生的功的特性。如果一方面该操作看起来无害且简单,另一方面却极其微妙,系统的特性和响应就取决于此。在理想情况下,输入能量(Ei)和输出能量(Eu)相同。比率:Eu / Ei提供了效率水平。在理想情况下(零损耗),它等于1,但实际上这是无法做到的。
 表1:电路效率表
表1:电路效率表
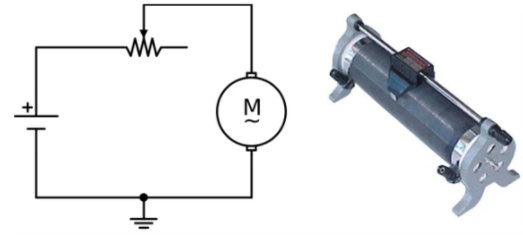
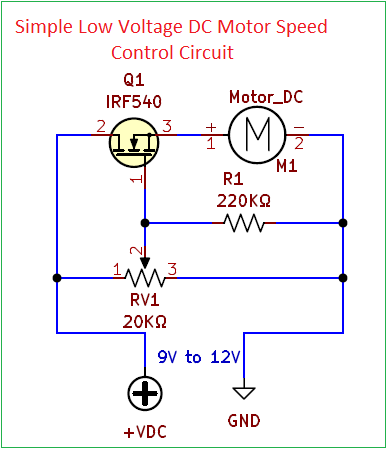
图3:一种可以改变发动机速度的方式
它也可以表示为百分比。例如,假设以最自然的解决方案降低电动机的速度,即在线路上插入一个电阻元件以降低传输电流(请参见图3)。该解决方案是最糟糕的解决方案之一,因为未使用的功耗非常大。
表格还以图形方式显示在图4中,该表格显示了与通过电流的障碍物质量有关的效率下降趋势。必须说,通过使用变阻器,可以在降低发动机转速时获得非常低的扭矩。实际上,如果电阻值过大,则电动机也可能在重负载下停止,或者在初始负载过大时甚至无法启动。
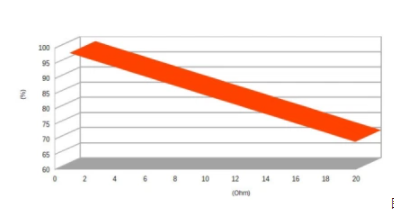
图4:变阻器电路改变发动机转速的效率图
为了克服该问题,可以使用齿轮和减速器,以保持较高的电动机转数和转矩,并成比例地降低机械负载的速度。如果要在不影响系统强度的情况下降低转速,则可以使用PWM控制器来改变电动机上的电压。
实际上,大多数小型直流电动机都设计为以高转速运行,因此,对于要求低转速的应用,PWM通常是最佳选择。
使用此技术可确保最大的转矩脉冲,这使您可以在极低的速度下以很大的力来驱动电动机。PWM是一种通过快速打开和关闭电子设备的电源来生成可变电压的方法(请参见图5)。借助PWM,您可以设计用于优化电源的放大器或逆变器。在单个周期内,平均电压取决于信号占空比,即取决于信号接通的时间量与信号断开的时间量。开关解决方案是实现高能效功率放大的最佳解决方案之一,该功能可带来高功率传输。
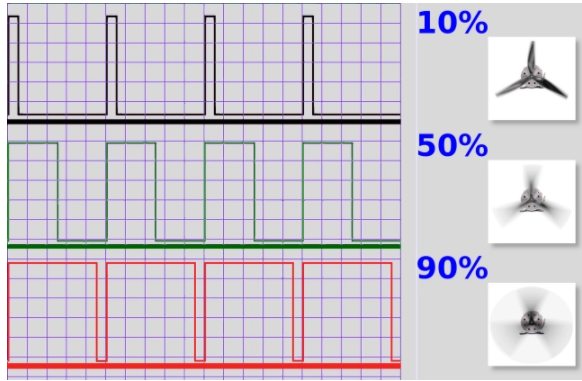
图5:PWM如何工作
该技术的效率非常高,通过查看图6的应用方案,可以了解各种系统之间的差异。让我们研究四种不同的配置,其中有意使用50%的能量为负载供电:
- a)在此图(左上)中,负载未受到脉冲串的作用,而是受到了等于电源一半的固定电压的作用。得益于在线性区域工作的晶体管的极化,可以实现控制。散热非常高,效率为49%;
- b)在第二个示意图(右上方)中,晶体管的行为就像一个开关元件,由组件“基极”端子上的脉冲信号驱动。解决方案的效率非常高,大约为85%。
- c)第三个原理图(左下)提供了使用普通功率MOSFET(IRF530)的条件。电路效率非常高,大约为97%;
- d)第四个原理图(右下)使用一种新技术,即SiC Mosfet作为引导组件。效率非常高,超过99%。来自电源的几乎所有能量都以非常低的损耗传递给负载。
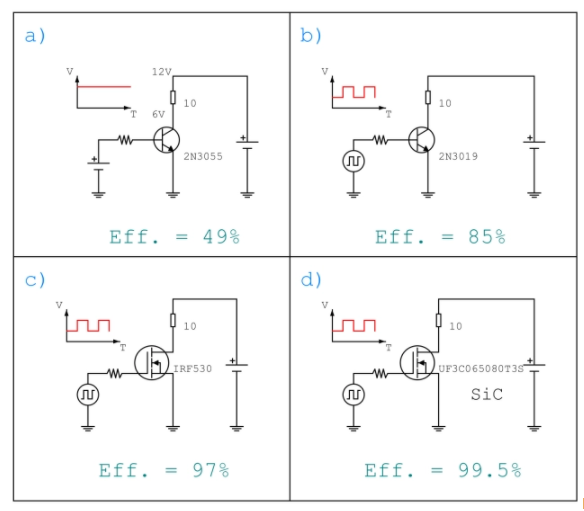
图6:PWM使您可以非常高效地调整负载的功率
因此,PWM并不等同于向负载施加固定电压。扭矩由平均电流确定。由于较小的线圈电感,小型电动机的效率在相对较低的PWM频率下降低。当电感较小时,电流跟随PWM信号,与电流相比增加了散热。阻尼会降低扭矩,同时会产生更多的热量。因此,较高的PWM频率可提高效率。较大的电动机具有较高的电感,即使在较低的PWM频率下,效率也更高。
驱动程序和动力控制
前面段落中的图清楚地表明,无论使用哪种技术,都必须使用功率设备来控制电动机(任何类型)。驱动器必须提供高电流,这对于操作电动机以及采用正确的命令可编程性,速度或加速度是必需的。它们的设计必须具有很高的精度和鲁棒性,因为它们也可以用于工业用途。因此,必须对它们进行电流保护,并用有源和无源散热器进行冷却。电路中使用的功率MOSFET必须至少能够承受电源电压和电机所需的最大电流。拥有大型Mosfets总是更好。还使用“预驱动器”电路,因为它们使用线性稳压器,电荷泵和自举电容器在内部生成栅极驱动电压。高级微系统(AMS)CMAX-410的运动控制系统,在所示图7。
图7:Advanced Micro Systems CMAX-410运动控制系统
它提供了用于控制4 A步进电机运动的集成解决方案。它可以由用户独立编程,也可以由中央主机控制。它通过工业连接器发送电动机和控制信号。所有运动控制系统均提供可编程电流,保持电流,微步进模式,速度,加速度等。它是专门为减少电气干扰和最大程度地提高安全性而设计的。已通过CE认证。
结论
旨在用于运动控制和驱动的系统的设计无疑是一件令人着迷且极为精致的事情。它涉及不同的研究和应用领域,例如物理,电子,电力等。世界上最好的公司的设计师每天都做出巨大的努力,以创建非常有效且尤其是安全的系统。
编辑:hfy
-
运动控制器
+关注
关注
2文章
405浏览量
24758 -
步进电动机
+关注
关注
0文章
60浏览量
12792 -
磁阻电机
+关注
关注
1文章
31浏览量
8406 -
同步电动机
+关注
关注
0文章
67浏览量
9753
发布评论请先 登录
相关推荐
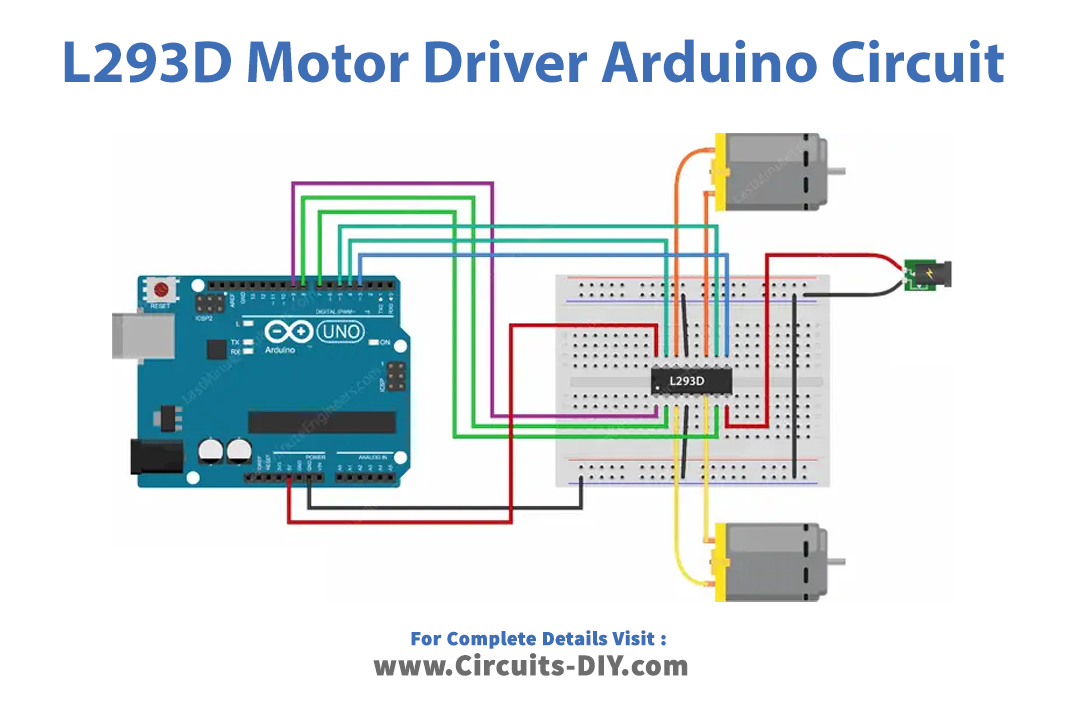
驱动器在自动化中的应用 驱动器的类型及特点
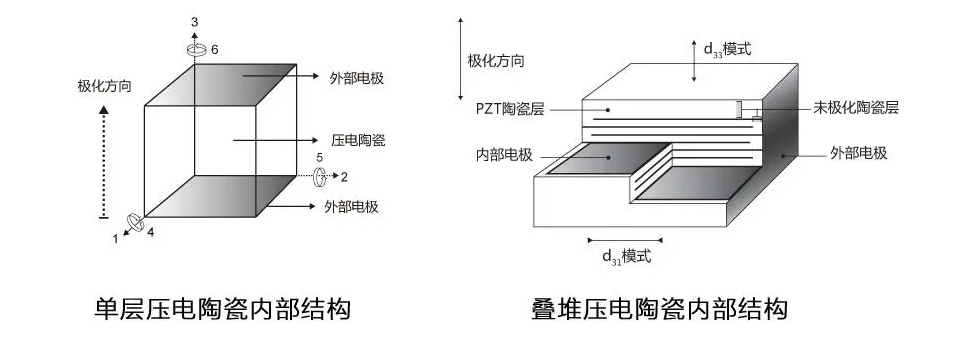
ATA-P0102功率放大器在压电陶瓷及压电叠堆驱动中的应用
简单低压直流电机速度控制电路图





 工商网监
工商网监
评论