 基于三相霍尔传感器无刷直流驱动器的Z16FMC微控制器
基于三相霍尔传感器无刷直流驱动器的Z16FMC微控制器
本应用笔记介绍了用作三相霍尔传感器无刷直流驱动器的Z16FMC微控制器。该微控制器具有使用多电机开发套件的片上集成应用程序阵列,该套件可提供快速而精确的故障控制,以及高系统效率和易于定制的应用程序固件开发。
硬体设计
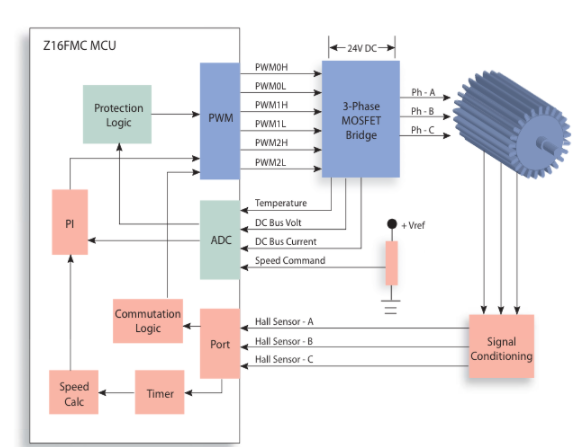
该设计涉及以闭环或开环方式运行BLDC电动机,其速度由电位计设置。如架构图所示,该设计通过Z16FMC微控制器PWM模块生成PWM电压,以运行BLDC电机。显示器运行时,三个霍尔传感器的状态根据转子位置而变化。根据传感器的状态(换向)切换三相的电压。霍尔传感器每60度中断一次捕获计时器刻度,以测量电动机的转子速度。在电流过载,欠压或过压以及温度过高的情况下,可以使用其他外围功能来保护系统。以下各节介绍了硬件。
三相桥式MOSFET
三相桥式MOSFET由六个以桥式连接的MOSFET组成,用于驱动BLDC电机的三相。直流母线保持在24 V,这与BLDC电机的额定电压相同。每个高端和低端MOSFET相对都使用单独的Hi-Lo栅极驱动器,从而使硬件设计更简单,更可靠。自举电容器充电会驱动高端MOSFET。使用分压器将其降低至合适的值可监控直流母线电压,在直流回路中并联一个分流器可监控直流母线电流。NTC型温度传感器提供与温度成正比的模拟电压输出。
PWM模块
Z16FMC微控制器包含一个在此应用中配置为以互补模式运行的6通道,12位PWM模块。开关频率设置为20 kHz。PWM输出根据霍尔传感器的输入进行控制。霍尔传感器的输入确定了三相桥式MOSFET的开关顺序。PWM的占空比与加速器电位计输入成正比。占空比的变化控制通过电动机绕组的电流,从而控制电动机转矩。
换向逻辑
霍尔传感器连接到Z16FMC微控制器上的端口PD3,PD4和PD5。当任何引脚上的输入状态更改时,都会产生一个中断。中断服务程序检查所有三个引脚的状态,并相应地切换电动机三相的电压。梯形换向用于该应用,以简化实现。在此换向过程中,通过将一个相的顶部MOSFET和另一相的底部MOSFET导通,将任意两相连接到整个DC总线。第三阶段不通电(该阶段的顶部和底部MOSFET均关断)。
速度测量
使用三个霍尔传感器中的一个来捕获Timer0滴答,该滴答代表用于闭环计算的实际霍尔周期。
软件实施
在软件的实施过程中,将执行以下操作:初始化初始化硬件模块以实现以下功能。
从内部振荡器切换到外部振荡器以进行系统操作
在ADC,比较器和UART的相应引脚上启用备用功能,并驱动LED
配置Timer0在连续模式下运行以捕获霍尔周期时序
配置比较器以在产生过电流时关闭PWM模块
使能运算放大器以测量流到电动机的DC总线电流
配置ADC以读取模拟值,例如DC总线电压,电流,温度和加速电位计(一次仅一个通道)
将PWM模块配置为具有20 kHz开关频率的单独操作模式,根据PWMOUT寄存器中的值控制输出,并在上电复位和任何复位时将PWMOUT默认驱动为低断开状态。
打断
端口D中断控制换向。霍尔传感器输出在引脚PD3:5上读取,软件执行其滤波操作,并确定MOSFET的开关顺序。PWM定时器中断用于计时周期性发生的任务,并用于后台循环从不同通道读取模拟值并对这些值求平均,更新LED指示灯状态,并更新UART上的读取参数。
编辑:hfy
-
微控制器
+关注
关注
48文章
7497浏览量
151124 -
驱动器
+关注
关注
52文章
8173浏览量
146092 -
霍尔传感器
+关注
关注
27文章
708浏览量
63113 -
无刷直流
+关注
关注
1文章
38浏览量
14692
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论