 全面解析新一代宝马电子架构
全面解析新一代宝马电子架构
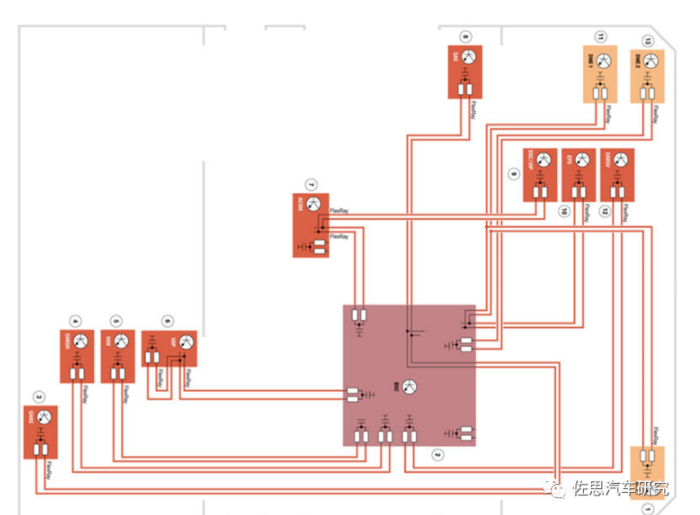
上图为宝马 Flexray 总线拓扑。1 为 8 缸发动机 ECU,2 为车身域控制器,3 为调节后轴差分锁 GHAS,4 为后防滚稳定器 EARSH,5 为后轴滑动角度控制器,6 为垂直动态平台,7 为被动安全 ECU,8 为 ADAS 域控制器,9 为制动执行器,10 为电子助力转向,11 为 6 缸发动机 ECU,12 为前防滚稳定器 EARSV,12 为 8 缸发动机 ECU(8 缸发动机双 ECU)。Flexray 总线最早由奔驰在 2000 年提出,2009 年 Flexray 总线标准改为 ISO17458,Flexray 协会也就此解散。Flexray 的核心成员是奔驰、宝马、通用、沃尔沃、大众、NXP、博世、Vector。Flexray 总线收发器由 NXP 垄断 90%的市场,开发工具则由 Vector 垄断,导致其整体成本远高于 CAN 总线,只有对安全比较重视的奔驰、宝马和沃尔沃愿意使用,国内吉利的领克系列技术源自沃尔沃,因此也使用了 Flexray 总线。
Flexray 是目前最先进最可靠的成熟的总线系统,TSN 更先进,但还未进入实用状态,TSN 与 Flexray 相比主要是带宽远超 Flexray。但是在底盘领域,带宽优势完全无法发挥,10Mbits 足够了,因此将来 TSN 也不会取代 Flexray 在底盘领域的地位,而 TSN 更适合骨干网。
Flexray 的优点如下:
1)Flexray 高达 10Mb/s 的带宽为高精度控制的车辆控制器提供了更大的便捷,能够实现多个 ECU 之间参数的迅速交互和实时性控制。
2)Flexray 两条独立的通道 CHA/CHB 在物理层上能实现完全的解耦,可实现更大传输速率的要求或是实现冗余传输以保证数据传输的安全性。
3)Flexray 的时间片长度可以在一定范围内自由设置,区别于 CAN 消息每帧 8byte 的限制,Flexray 帧数据段长度可在 0~255byte 之间自由变动。
4)Flexray 是时间触发的网络,各个节点均有其本地的时钟,并与全局时钟相对应,对于实时性功能的实现有很大帮助。
5)Flexray 的通讯段内包含静态段和动态段两个部分,可以同时实现时间触发的实时性和精确性以及事件触发的灵活性和可配置性。
6)Flexray 支持多种形式的拓扑结构,对于较为简单的网络,一般可采取和 CAN 网络类似的被动总线型拓扑结构;而对于安全性要求较高,或是多个模块之间进行的数据传输,可采用主动星型拓扑结构,对数据进行选择性的主动截断或者发送,可防止一个模块出现故障时导致整个网络的瘫痪。
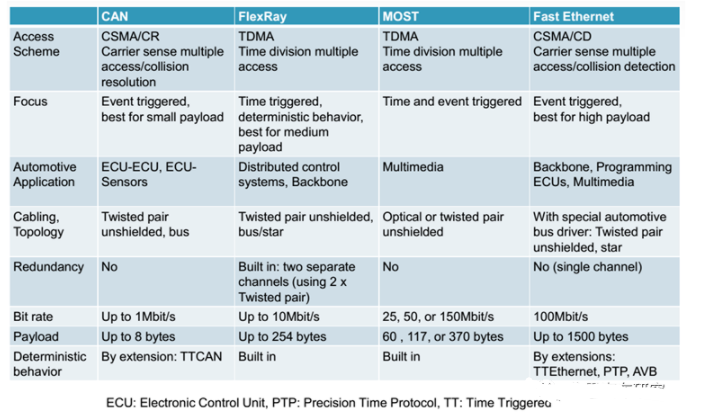
上表为常见总线对比
在执行器方面,宝马新车型使用 VIP 即 VirtualIntegration Platform,老车型使用 DSC,也就是电子车身稳定系统 ESP 的另一种叫法。VIP 实际就是德国大陆汽车的 MK-C1,结合线控制动和 ESP 为一体的执行器,比特斯拉用的博世 iBooster 先进得多(iBooster 频发故障,分体式设计成本高,可靠性低)。
博世与 MK-C1 同一层次的执行器,iBooster 的升级版执行器是 IPB,卡迪拉克在 2019 年上市的 XT4 是全球第一个用博世 IPB 的量产车型,比亚迪即将在 2020 年上市的“汉”是中国第一个使用博世 IPB 的量产车型。相信特斯拉在大改款后也会用上 IPB。不过那估计至少要等 3 年以上了。
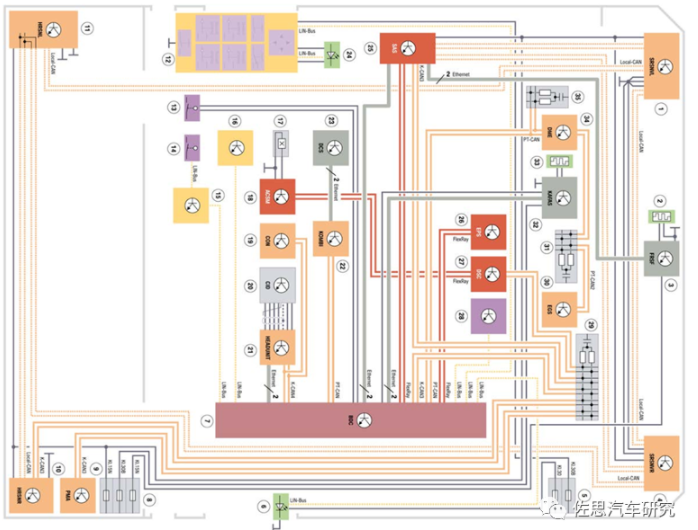
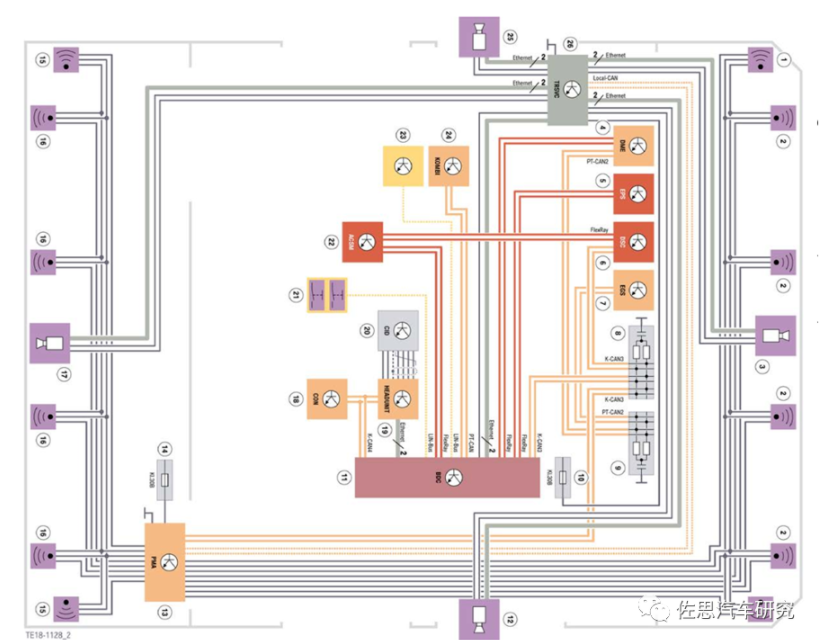
上图为宝马 ADAS 架构,1 为前右侧短距离毫米波雷达,2 为前长距离雷达加热器(极端低温下,毫米波雷达会失效,军事领域常见有雷达加热装置,民用设备上是第一次见到),3 为前成距离雷达,4 为前左侧短距离毫米波雷达,5 为前右侧配电盒保险,6 为右倒车镜 LED 信号灯,7 为车身域控制器,8 为右后配电盒保险,9 为自动泊车控制器,10 为右后侧短距离毫米波雷达,11 为左侧后短距离毫米波雷达,12 为驾驶员一侧门交换器,13 为驾驶员一侧门连接,14 为智能安全报警即一键紧急呼叫,15 为音频运作单元,16 为转向柱上开关总成,17 为驾驶员侧安全带卡扣检测,18 为被动安全 ECU,19 为通讯控制器,20 为中控显示,21 为 HU-H3,22 为仪表,23 为驾驶员监测摄像头,24 为左倒车镜 LED 信号灯,25 为 ADAS 控制器(SAS),26 为电子助力转向,27 为制动执行器,28 为雨雾水滴雾气凝结传感器,29 为 CAN 终端电阻,30 为电子变速箱控制,31 为 CAN 终端电阻,32 为三目摄像头系统,33 为摄像头加热系统(检测到有雾气凝结或下雨即启动电阻加热,防止摄像头镜头模糊),34 为发动机 ECU,35 为 CAN 终端电阻。
宝马 ADAS 顶配构成
低配车型没有 SAS,只有高配车型才有,SAS 连接了所有传感器。四个短距离毫米波雷达也就是角雷达采用一正一副的本地 CAN 连接,四个角雷达由安波福提供,型号为 SRR-03,采用 77GHz 设计,有效距离 75 米,水平 FOV 达 100 度。前长距离雷达为大陆的 ARS410,比特斯拉的 ARS-4B 略好一点点,与众不同的是长距离雷达有加热装置,且是用以太网直接连接 SAS,这非常罕见,宝马可能是取雷达的原始信号进行最高等级的传感器融合,也可能只是觉得 CAN 的带宽太低,大部分厂家包括特斯拉都是用 CAN 连接,CAN 连接只能输出已经刨除所有静态目标的数据,数据只是速度、角度和方位角,这是已经多次处理过的数据,而宝马似乎是取原始数据自己处理,这势必增加处理器的负担。雷达的快速 FFT 是很消耗计算资源的。此外,前长距离雷达还有单独的加热电路,并且是放在保险杠内部,而不是大多数企业那样裸露在外。SAS 很可能采用了英特尔的 Atom 处理器以及英飞凌的 TC297T MCU。SAS 应该也是安波福供应。
摄像头部分,宝马高配车型采用德国 ZF 的三目摄像头,跟特斯拉一样,FOV 分别是 28、52 和 152 度,分别对应 250、120、20 米距离内目标。处理器自然是 Mobileye 的 EyeQ4。此外还有一个摄像头通过 LVDS 与自动远近光车灯控制器(FLA)连接,达到自动远近光功能,FLA 连在 PT-CAN 线上。
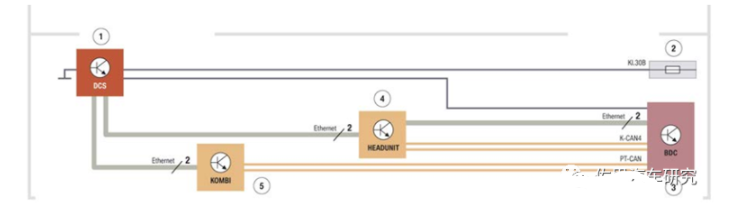
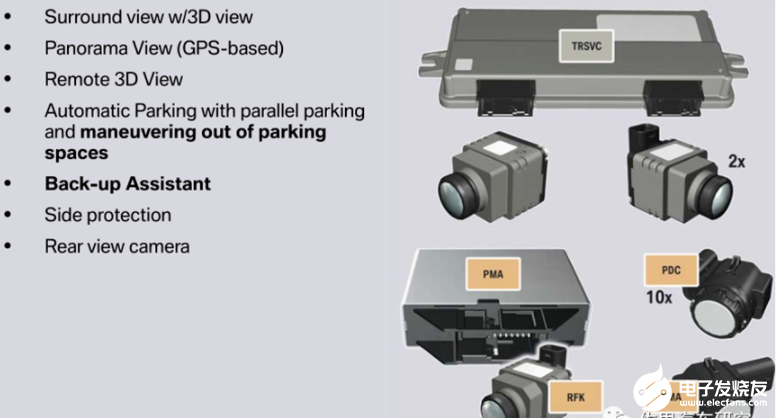
自动泊车系统构成如上图,包括博世提供的 360 环视(TRSVC),PMA 自动泊车控制器,12 个超声波传感器。超声波传感器也由博世供应。
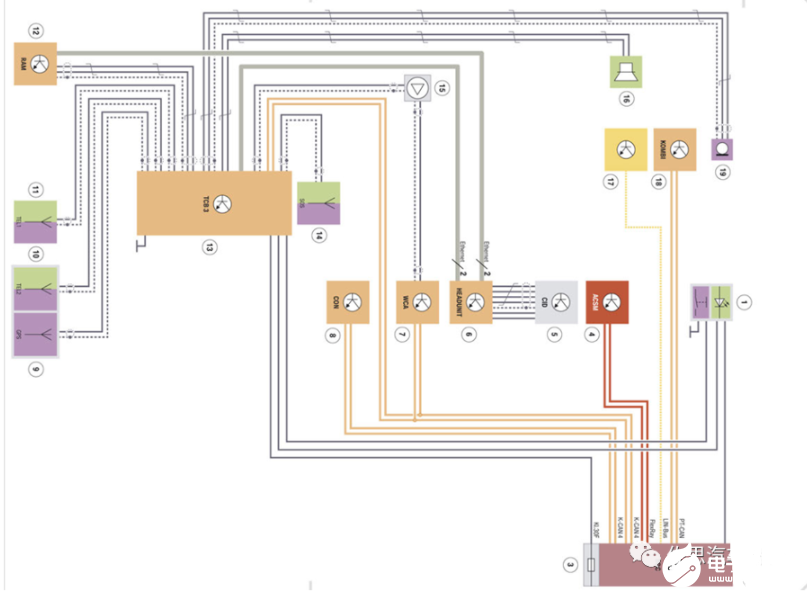
宝马自动泊车接线图如上。1 和 15 是远距超声波传感器,16 和 2 是近距超声波传感器。3、12、17、25 是 4 个环视摄像头,26 是 360 环视控制器,13 是自动泊车控制器(PMA),4、5、6、7 分别对应发动机、转向、制动和变速箱。19、20、21、22、23、24 分别对应 HU-H3、中控、自动泊车按键与 360 环视按键、被动安全 ECU、转向柱开关总成和仪表。TRSVC 通过以太网与 4 个 130 万像素摄像头连接(有一点比较奇怪,宝马单独把后视摄像头命名为 RFK,似乎这个摄像头不是鱼眼镜头,而是普通 FOV 的摄像头),然后进入博通的 BCM89501 以太网交换机,然后经 NXP 的 i.mx6 双核处理器拼接,再用以太网输出到车身域控制器中转到 HU-H3 中控。同时还有一路本地 CAN 直接与自动泊车控制器 PMA 相连,PMA 连接 12 个超声波传感器,同时通过 K-CAN 与车身域控制器连接。考虑到 i.mx6 的处理能力,想让其识别车位是不可能的,更不用说识别行人或车辆了。因此这个 360 环视只是在自动泊车中让驾驶者可以全景监控的。目前国内几乎所有 360 环视都是基于美信的 GMSL 设计的,即 MAX96705 加 MAX9286,这主要是成本因素,宝马从 2012 年就开始用以太网做 360 环视,实时性比 GMSL 略好。
宝马将 T-Box 称为 TCB,即 TelematicCommunication Box。目前宝马的 TCB 发展到第三代,称之为 TCB3,TCB3 在宝马 Z4 上是放在后备箱里,某些车型上是放在车顶的鲨鱼鳍里。语音识别、语音短信发送、联网服务、宝马远程服务、紧急呼叫都要靠 TCB 完成,TCB3 支持 LTE 4.5G,最高速率 300MBit/s,内部不再包含 WLAN。
TCB3 见上图,1 为 GPS 天线,2 为 4G 天线,3 为 Telematics 天线,4 为连接器,包括以太网连接器,K-CAN 连接和驾驶员侧麦克风连接。5 为无线充电连接,6 为紧急 GSM 天线,7 连接紧急扬声器、电源、紧急呼叫键、紧急呼叫 LED。可能是考虑到 4G 信号覆盖不够好,所以加了紧急 GSM 天线。
上图为 TCB3 连接图。1 为紧急呼叫按键和 LED,2 为车身域控制器,3 为车身域配电盒保险,4 为被动安全 ECU,5 为中控显示,6 为 HU-H3,7 为无线充电,8 为 CAN 控制器,9 为 GPS 天线,10 为 Telematics 天线,11 为 4G 天线,12 为音频接收模块 RAM,13 为 TCB3,14 为紧急 GSM 天线,15 线性放大器,16 为紧急扬声器,17 为转向柱开关总成,18 为仪表,19 为驾驶员侧麦克风。TCB3 通过以太网与 HU-H3 相连,再通过 HU-H3 内的以太网交换机与 RAM 相连。

这里需要介绍一下宝马的 FZD,即车顶功能中心,这个功能中心有警报、调整天窗、手势识别、麦克风语音输入、紧急呼叫按键。虽然跟阅读灯在一个壳体内,但是 FZD 和阅读灯没联系。FZD 两侧是麦克风,FZD 正中间是手势识别摄像头,手势识别系统由安波福提供,据说是 TOF 摄像头,感觉可能性不大。因为摄像头边缘有明显的红外 LED 颗粒,应该还是传统摄像头。手势识别有 NXP 的 4 核 i.mx6 完成,使用瑞萨的 RH850 做 MCU。RH850 通过 K-CAN4 输出到车身域控制器。K-CAN4 与 HU-H3、TCB3 和 RAM 连接。
宝马新一代电子架构复杂,这里只是简要介绍。汽车电子架构实际由上游硬件供应商决定,现在远未到完全脱离硬件只说软件的地步,未来十年恐怕都不可能。电子架构留给汽车厂商发挥的空间有限,特斯拉这种不太在乎车规的厂家发挥会更自由一些,但即便如此,也要受制于硬件,很多模拟或混合界面 IC 不是挖几个人想做就能做出来的,那需要最少 15 年以上的模拟 IC 经验。若要先进且可靠必定就会导致成本增加,特斯拉不是先进,是不太在乎车规而已,即便如此,它也不能跟奔驰宝马比先进程度,毕竟特斯拉更在意成本。
在特斯拉看来,将钱花在百万分之一甚至千分之一的 CornerCase 上完全没必要,所以特斯拉不用激光雷达。马斯克用市场化的工业级标准替代未充分竞争的航天级标准做了 SpaceX,成本自然降低极多。但是在传统车厂看来,百万分之一的可能也要考虑到,这非常有必要,这是对生命的敬畏,每一个生命都该被拯救。
编辑:hfy
-
CAN
+关注
关注
57文章
2766浏览量
464228 -
稳定器
+关注
关注
0文章
55浏览量
13609 -
激光雷达
+关注
关注
968文章
4024浏览量
190313 -
车身域控制器
+关注
关注
1文章
24浏览量
1874
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论