 如何将交流感应电动机变成直流电动机
如何将交流感应电动机变成直流电动机
该文件由Microchip Technology的应用程序段工程师Steve Bowling撰写,讨论了电动机的工作原理,并描述了AC感应电动机,变速ACIM控制和FOC。本文档还说明了如何将交流感应电动机变成直流电动机。
高性能电机控制领域已由同步直流电机主导。这组电动机包括有刷,无刷,磁场和永磁品种。占据主导地位的简单原因是直流电动机更易于控制。如果应用需要很好地控制电动机扭矩,速度或位置,则尤其如此。直流电动机的机电模型显示,电动机转矩在极限范围内是输入电流的近似线性函数。因此,使用比例积分微分(PID)控制器从直流电动机中获得可靠的性能是相对容易的任务。
在“实际设计世界”中,要在应用程序中使用的一种电动机的选择过程可能很复杂。不能仅根据控制的容易程度来选择特定的电动机。还有许多其他与系统相关的变量需要处理,例如:
- 维护电机有多容易?
- 电动机出现故障时,系统会如何处理?(即短路绕组)
- 什么是工作环境?
- 电机将如何冷却?
- 电机的成本是多少?
注意事项列表可以持续不断地…
交流感应电动机(ACIM)与其他类型的电动机相比具有明显的优势,并且通常在需要鲁棒的定速解决方案时使用。微控制器(MCU)和电力电子设备的发展已使ACIM的廉价变速控制成为可能。但是,使用基本控制方法无法匹配直流电动机的性能。本文将探讨磁场定向控制(FOC)的主题,以及如何将其用于改进使用数字信号控制器(DSC)的ACIM的控制。FOC使您可以将直流控制技术用于交流电动机,并可以在电动机选择过程中为下一个设计删除变量之一。
电机如何工作
当电流流过磁场时,电动机会产生机械力。同步电动机具有磁场源。该磁场可以由永磁体或由电流源供电的绕组提供。在极限范围内,电动机的转矩响应是电流和磁场强度的线性函数。线性响应使这些电机在高性能应用中易于控制。PID控制器可用于控制电动机电流和产生的电动机转矩。如果需要,可以使用辅助PID控制器来控制位置或速度。
因此,看来我们已经解决了问题!我们将仅使用带有励磁绕组或永磁体的同步电动机来获得良好的控制性能。好吧,“等一下,”您可能会说。“在我的应用中,我需要一台大功率电机。我可以使用带有转子和定子绕组的电动机。但是,我将不得不担心更换电刷并保持转子冷却。我可以使用带有永磁体的无刷电动机,但是磁铁的成本会使电动机的成本过高。”
交流感应电动机
在这种情况下,ACIM确实可以提供帮助。ACIM在电动机的外部具有绕组,因此很容易提供冷却。转子是一个简单的钢制保持架,因此坚固耐用并可以承受高温。ACIM没有电刷会磨损。那好吧–到目前为止,一切都很好。现在,看一下电动机的运行方式。
由于交流电源广泛可用,因此在设计ACIM时通常会考虑特定的线路电压和频率。在此讨论中,让我们看一下典型ACIM的铭牌。我们的示例铭牌中显示的参数如下所示:
电压:230 VAC
频率:60 Hz
FLA:1.4A
HP:1/3
RPM:3450
其中,铭牌规定了电动机的额定功率,工作电压,工作频率和工作RPM。电机的定子绕组的排列方式使得当用交流电通电时会产生旋转磁场。
ACIM的转子必须以比旋转磁场低的速度旋转。励磁速度和转子速度之间的差异称为滑差。滑差可以表示为比率或频率,但是考虑滑差频率会有所帮助。对于此示例电动机,旋转磁场速度将为60转/秒或3,600 RPM。但是,您会注意到负载下的铭牌RPM仅为3,450 RPM,即57.5转/秒。因此,转差频率为60 Hz – 57.5 Hz或2.5 Hz。
在此示例中,您可以将2.5 Hz滑差频率视为通过变压器耦合为转子提供能量的交流电源。交流电为转子通电,从而产生转子磁场,从而使电动机产生转矩。ACIM滑差使电动机能够在一定程度上自我调节其速度。随着电动机负载的增加,转子速度将降低。然后,转差频率将增加,这将增加转子电流和电动机转矩。
变速ACIM控制
通过改变提供给电动机的频率和电压,ACIM可以以不同的速度和扭矩级别运行。假设您想以1/2额定速度运行示例电动机。为此,您可以将输入到电动机的频率降低1/2或30 Hz。如果我们想以1/4速度运行电动机,则频率将降低到15 Hz。
您还希望通过保持定子电流恒定来保持定子磁场相对恒定。ACIM电机是感应式的,并且定子电流将随着输入频率的降低而增加。因此,当频率降低时,还需要按比例降低输入电压。恒定的V / Hz曲线通常用于提供ACIM的变速操作。我们的示例电动机的V / Hz常数可以通过将工作频率除以工作电压来计算。
K = V / Hz = 230/60 = 3.83
现在,对于给定的输入频率选择,我们可以为该输入频率计算所需的驱动电压:
电压= K *频率
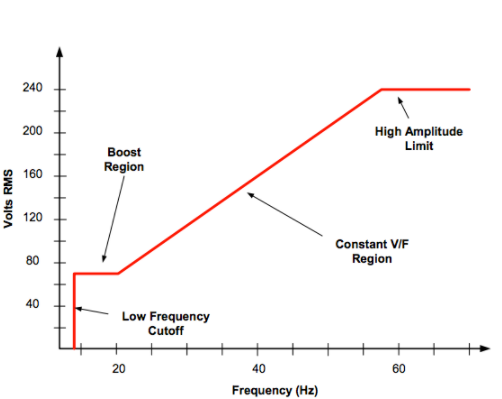
图1变速ACIM应用的典型V / Hz曲线
结果称为“伏特-赫兹”曲线,可以如图1所示绘制。没有固定的规则说驱动电压必须与频率保持固定的线性关系。实际上,通常会在特定的频率范围内更改V / Hz曲线的形状,以优化特定速度范围内的驱动性能。例如,已对图1中所示的轮廓形状进行了调整,以在低频范围内提供更高的电压。当电动机从静止状态启动时,此修改可提高电动机转矩,以帮助克服负载摩擦和惯性。在电动机的机械极限范围内,还可以将驱动频率提高到铭牌值之外,以实现更高的速度。但是,可用电压可能会受到限制,因此电动机转矩也会降低。
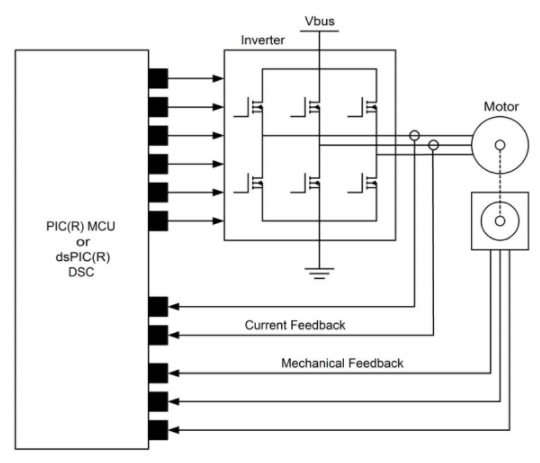
图2用于变速ACIM控制的典型系统框图
对于不需要频繁改变速度或负载的应用,用于控制ACIM的V / Hz方法效果很好。当使用控制回路调节速度或电机电流时尤其如此。图2显示了可用于V / Hz应用的典型系统框图。MCU具有专用的PWM外设来驱动6晶体管逆变器电路。MCU测量电机转速表的频率,计算速度误差,并使用PID控制回路生成驱动需求。使用V / Hz配置文件将驱动器需求转换为所需的电压和频率。最后,PWM调制代码随时间改变占空比,以生成具有适当幅度和频率的正弦驱动信号。
编辑:hfy
-
电动机
+关注
关注
75文章
4134浏览量
97404 -
直流电动机
+关注
关注
7文章
196浏览量
23045 -
交流感应
+关注
关注
0文章
5浏览量
6579 -
ACIM
+关注
关注
0文章
7浏览量
9882
发布评论请先 登录
相关推荐
直流电动机的调速
【我是电子发烧友】说说直流电动机
直流电动机旋转时,感应电动势Ea是不是总是和电枢电压Ia*Ra反方向的?
带光电编码器式直流电动机模型及控制
如何使用Arduino控制直流电动机
交流电动机和直流电动机的结构及工作原理
直流电动机的结构
Arduino直流电动机控制教程






 工商网监
工商网监
评论