 逐个分析鸿蒙内核七段追踪代码
逐个分析鸿蒙内核七段追踪代码
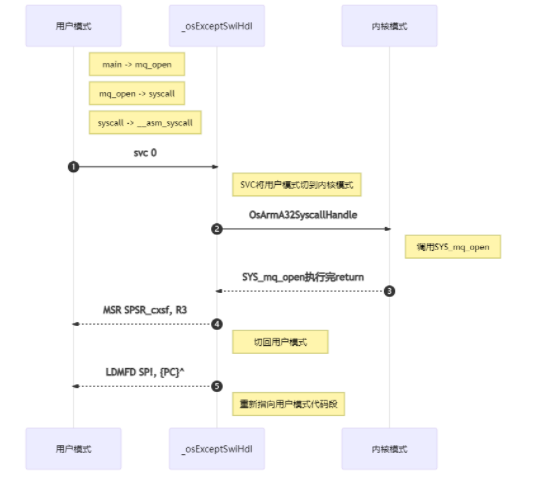
本篇通过一张图和七段代码详细说明系统调用的整个过程,代码一捅到底,直到汇编层再也捅不下去. 先看图,这里的模式可以理解为空间,因为模式不同运行的栈空间就不一样.
过程解读
在应用层main中使用系统调用mq_open(posix标准接口)
mq_open被封装在库中,这里直接看库里的代码.
mq_open中调用syscall,将参数传给寄出器R7,R0~R6
SVC 0完成用户模式到内核模式(SVC)的切换
_osExceptSwiHdl运行在svc模式下.
PC寄存器直接指向_osExceptSwiHdl处取指令.
_osExceptSwiHdl是汇编代码,先保存用户模式现场(R0~R12寄存器),并调用OsArmA32SyscallHandle完成系统调用
OsArmA32SyscallHandle中通过系统调用号(保存在R7寄存器)查询对应的注册函数SYS_mq_open
SYS_mq_open是本次系统调用的实现函数,完成后return回到OsArmA32SyscallHandle
OsArmA32SyscallHandle再return回到_osExceptSwiHdl
_osExceptSwiHdl恢复用户模式现场(R0~R12寄存器)
从内核模式(SVC)切回到用户模式,PC寄存器也切回用户现场.
由此完成整个系统调用全过程
七段追踪代码,逐个分析
1.应用程序 main
int main(void)
{
char mqname[NAMESIZE], msgrv1[BUFFER], msgrv2[BUFFER];
const char *msgptr1 = "test message1";
const char *msgptr2 = "test message2 with differnet length";
mqd_t mqdes;
int prio1 = 1, prio2 = 2;
struct timespec ts;
struct mq_attr attr;
int unresolved = 0, failure = 0;
sprintf(mqname, "/" FUNCTION "_" TEST "_%d", getpid());
attr.mq_msgsize = BUFFER;
attr.mq_maxmsg = BUFFER;
mqdes = mq_open(mqname, O_CREAT | O_RDWR, S_IRUSR | S_IWUSR, &attr);
if (mqdes == (mqd_t)-1) {
perror(ERROR_PREFIX "mq_open");
unresolved = 1;
}
if (mq_send(mqdes, msgptr1, strlen(msgptr1), prio1) != 0) {
perror(ERROR_PREFIX "mq_send");
unresolved = 1;
}
printf("Test PASSED\n");
return PTS_PASS;
}
2. mq_open 发起系统调用
mqd_t mq_open(const char *name, int flags, ...)
{
mode_t mode = 0;
struct mq_attr *attr = 0;
if (*name == '/') name++;
if (flags & O_CREAT) {
va_list ap;
va_start(ap, flags);
mode = va_arg(ap, mode_t);
attr = va_arg(ap, struct mq_attr *);
va_end(ap);
}
return syscall(SYS_mq_open, name, flags, mode, attr);
}
解读
SYS_mq_open是真正的系统调用函数,对应一个系统调用号__NR_mq_open,通过宏SYSCALL_HAND_DEF将SysMqOpen注册到g_syscallHandle中.
static UINTPTR g_syscallHandle[SYS_CALL_NUM] = {0}; //系统调用入口函数注册 static UINT8 g_syscallNArgs[(SYS_CALL_NUM + 1) / NARG_PER_BYTE] = {0};//保存系统调用对应的参数数量 #define SYSCALL_HAND_DEF(id, fun, rType, nArg) \ if ((id) < SYS_CALL_NUM) { \ g_syscallHandle[(id)] = (UINTPTR)(fun); \ g_syscallNArgs[(id) / NARG_PER_BYTE] |= ((id) & 1) ? (nArg) << NARG_BITS : (nArg); \ } \ #include "syscall_lookup.h" #undef SYSCALL_HAND_DEF SYSCALL_HAND_DEF(__NR_mq_open, SysMqOpen, mqd_t, ARG_NUM_4)
g_syscallNArgs为注册函数的参数个数,也会一块记录下来.
四个参数为 SYS_mq_open的四个参数,后续将保存在R0~R3寄存器中
3. syscall
long syscall(long n, ...)
{
va_list ap;
syscall_arg_t a,b,c,d,e,f;
va_start(ap, n);
a=va_arg(ap, syscall_arg_t);
b=va_arg(ap, syscall_arg_t);
c=va_arg(ap, syscall_arg_t);
d=va_arg(ap, syscall_arg_t);
e=va_arg(ap, syscall_arg_t);
f=va_arg(ap, syscall_arg_t);//最多6个参数
va_end(ap);
return __syscall_ret(__syscall(n,a,b,c,d,e,f));
}
//4个参数的系统调用时底层处理
static inline long __syscall4(long n, long a, long b, long c, long d)
{
register long a7 __asm__("a7") = n; //将系统调用号保存在R7寄存器
register long a0 __asm__("a0") = a; //R0
register long a1 __asm__("a1") = b; //R1
register long a2 __asm__("a2") = c; //R2
register long a3 __asm__("a3") = d; //R3
__asm_syscall("r"(a7), "0"(a0), "r"(a1), "r"(a2), "r"(a3))
}
解读
可变参数实现所有系统调用的参数的管理,可以看出,在鸿蒙内核中系统调用的参数最多不能大于6个
R7寄存器保存了系统调用号,R0~R5保存具体每个参数
可变参数的具体实现后续有其余篇幅详细介绍,敬请关注.
4. svc 0
//切到SVC模式
#define __asm_syscall(...) do { \
__asm__ __volatile__ ( "svc 0" \
: "=r"(x0) : __VA_ARGS__ : "memory", "cc"); \
return x0; \
} while (0)
看不太懂的没关系,这里我们只需要记住:系统调用号存放在r7寄存器,参数存放在r0,r1,r2寄存器中,返回值最终会存放在寄存器r0中
b reset_vector @开机代码
b _osExceptUndefInstrHdl @异常处理之CPU碰到不认识的指令
b _osExceptSwiHdl @异常处理之:软中断
b _osExceptPrefetchAbortHdl @异常处理之:取指异常
b _osExceptDataAbortHdl @异常处理之:数据异常
b _osExceptAddrAbortHdl @异常处理之:地址异常
b OsIrqHandler @异常处理之:硬中断
b _osExceptFiqHdl @异常处理之:快中断
解读
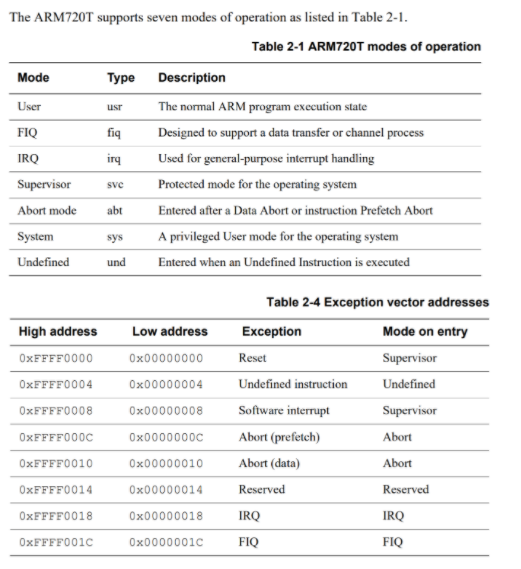
svc全称是 SuperVisor Call,完成工作模式的切换.不管之前是7个模式中的哪个模式,统一都切到SVC管理模式.但你也许会好奇,ARM软中断不是用SWI吗,这里怎么变成了SVC了,请看下面一段话,是从ARM官网翻译的:
SVC 超级用户调用。 语法 SVC{cond} #immed 其中: cond 是一个可选的条件代码(请参阅条件执行)。 immed 是一个表达式,其取值为以下范围内的一个整数: 在 ARM 指令中为 0 到 224–1(24 位值) 在 16 位 Thumb 指令中为 0-255(8 位值)。 用法 SVC 指令会引发一个异常。 这意味着处理器模式会更改为超级用户模式,CPSR 会保存到超级用户模式 SPSR,并且执行会跳转到 SVC 向量(请参阅《开发指南》中的第 6 章 处理处理器异常)。 处理器会忽略 immed。 但异常处理程序会获取它,借以确定所请求的服务。 Note 作为 ARM 汇编语言开发成果的一部分,SWI 指令已重命名为 SVC。 在此版本的 RVCT 中,SWI 指令反汇编为 SVC,并提供注释以指明这是以前的 SWI。 条件标记 此指令不更改标记。 体系结构 此 ARM 指令可用于所有版本的 ARM 体系结构。
而软中断对应的处理函数为_osExceptSwiHdl,即PC寄存器将跳到_osExceptSwiHdl执行
5. _osExceptSwiHdl
@ Description: Software interrupt exception handler
_osExceptSwiHdl: @软中断异常处理
@保存任务上下文(TaskContext) 开始... 一定要对照TaskContext来理解
SUB SP, SP, #(4 * 16) @先申请16个栈空间用于处理本次软中断
STMIA SP, {R0-R12} @TaskContext.R[GEN_REGS_NUM] STMIA从左到右执行,先放R0 .. R12
MRS R3, SPSR @读取本模式下的SPSR值
MOV R4, LR @保存回跳寄存器LR
AND R1, R3, #CPSR_MASK_MODE @ Interrupted mode 获取中断模式
CMP R1, #CPSR_USER_MODE @ User mode 是否为用户模式
BNE OsKernelSVCHandler @ Branch if not user mode 非用户模式下跳转
@ 当为用户模式时,获取SP和LR寄出去值
@ we enter from user mode, we need get the values of USER mode r13(sp) and r14(lr).
@ stmia with ^ will return the user mode registers (provided that r15 is not in the register list).
MOV R0, SP @获取SP值,R0将作为OsArmA32SyscallHandle的参数
STMFD SP!, {R3} @ Save the CPSR 入栈保存CPSR值 => TaskContext.regPSR
ADD R3, SP, #(4 * 17) @ Offset to pc/cpsr storage 跳到PC/CPSR存储位置
STMFD R3!, {R4} @ Save the CPSR and r15(pc) 保存LR寄存器 => TaskContext.PC
STMFD R3, {R13, R14}^ @ Save user mode r13(sp) and r14(lr) 从右向左 保存 => TaskContext.LR和SP
SUB SP, SP, #4 @ => TaskContext.resved
PUSH_FPU_REGS R1 @保存中断模式(用户模式模式)
@保存任务上下文(TaskContext) 结束
MOV FP, #0 @ Init frame pointer
CPSIE I @开中断,表明在系统调用期间可响应中断
BLX OsArmA32SyscallHandle /*交给C语言处理系统调用,参数为R0,指向TaskContext的开始位置*/
CPSID I @执行后续指令前必须先关中断
@恢复任务上下文(TaskContext) 开始
POP_FPU_REGS R1 @弹出FP值给R1
ADD SP, SP,#4 @ 定位到保存旧SPSR值的位置
LDMFD SP!, {R3} @ Fetch the return SPSR 弹出旧SPSR值
MSR SPSR_cxsf, R3 @ Set the return mode SPSR 恢复该模式下的SPSR值
@ we are leaving to user mode, we need to restore the values of USER mode r13(sp) and r14(lr).
@ ldmia with ^ will return the user mode registers (provided that r15 is not in the register list)
LDMFD SP!, {R0-R12} @恢复R0-R12寄存器
LDMFD SP, {R13, R14}^ @ Restore user mode R13/R14 恢复用户模式的R13/R14寄存器
ADD SP, SP, #(2 * 4) @定位到保存旧PC值的位置
LDMFD SP!, {PC}^ @ Return to user 切回用户模式运行
@恢复任务上下文(TaskContext) 结束
OsKernelSVCHandler:@主要目的是保存ExcContext中除(R0~R12)的其他寄存器
ADD R0, SP, #(4 * 16) @跳转到保存PC,LR,SP的位置,此时R0位置刚好是SP的位置
MOV R5, R0 @由R5记录SP位置,因为R0要暂时充当SP寄存器来使用
STMFD R0!, {R4} @ Store PC => ExcContext.PC
STMFD R0!, {R4} @ 相当于保存了=> ExcContext.LR
STMFD R0!, {R5} @ 相当于保存了=> ExcContext.SP
STMFD SP!, {R3} @ Push task`s CPSR (i.e. exception SPSR). =>ExcContext.regPSR
SUB SP, SP, #(4 * 2) @ user sp and lr => =>ExcContext.USP,ULR
MOV R0, #OS_EXCEPT_SWI @ Set exception ID to OS_EXCEPT_SWI.
@ 设置异常ID为软中断
B _osExceptionSwi @ Branch to global exception handler.
@ 跳到全局异常处理
解读
运行到此处,已经切到SVC的栈运行,所以先保存上一个模式的现场
获取中断模式,软中断的来源可不一定是用户模式,完全有可能是SVC本身,比如系统调用中又发生系统调用.就变成了从SVC模式切到SVC的模式
MOV R0, SP;sp将作为参数传递给OsArmA32SyscallHandle
调用OsArmA32SyscallHandle这是所有系统调用的统一入口
注意看OsArmA32SyscallHandle的参数UINT32 *regs
6. OsArmA32SyscallHandle
/* The SYSCALL ID is in R7 on entry. Parameters follow in R0..R6 */ /****************************************************************** 由汇编调用,见于 los_hw_exc.s / BLX OsArmA32SyscallHandle SYSCALL是产生系统调用时触发的信号,R7寄存器存放具体的系统调用ID,也叫系统调用号 regs:参数就是所有寄存器 注意:本函数在用户态和内核态下都可能被调用到 //MOV R0, SP @获取SP值,R0将作为OsArmA32SyscallHandle的参数 ******************************************************************/ LITE_OS_SEC_TEXT UINT32 *OsArmA32SyscallHandle(UINT32 *regs) { UINT32 ret; UINT8 nArgs; UINTPTR handle; UINT32 cmd = regs[REG_R7];//C7寄存器记录了触发了具体哪个系统调用 if (cmd >= SYS_CALL_NUM) {//系统调用的总数 PRINT_ERR("Syscall ID: error %d !!!\n", cmd); return regs; } if (cmd == __NR_sigreturn) {//收到 __NR_sigreturn 信号 OsRestorSignalContext(regs);//恢复信号上下文 return regs; } handle = g_syscallHandle[cmd];//拿到系统调用的注册函数,类似 SysRead nArgs = g_syscallNArgs[cmd / NARG_PER_BYTE]; /* 4bit per nargs */ nArgs = (cmd & 1) ? (nArgs >> NARG_BITS) : (nArgs & NARG_MASK);//获取参数个数 if ((handle == 0) || (nArgs > ARG_NUM_7)) {//系统调用必须有参数且参数不能大于8个 PRINT_ERR("Unsupport syscall ID: %d nArgs: %d\n", cmd, nArgs); regs[REG_R0] = -ENOSYS; return regs; } //regs[0-6] 记录系统调用的参数,这也是由R7寄存器保存系统调用号的原因 switch (nArgs) {//参数的个数 case ARG_NUM_0: case ARG_NUM_1: ret = (*(SyscallFun1)handle)(regs[REG_R0]);//执行系统调用,类似 SysUnlink(pathname); break; case ARG_NUM_2://如何是两个参数的系统调用,这里传三个参数也没有问题,因被调用函数不会去取用R2值 case ARG_NUM_3: ret = (*(SyscallFun3)handle)(regs[REG_R0], regs[REG_R1], regs[REG_R2]);//类似 SysExecve(fileName, argv, envp); break; case ARG_NUM_4: case ARG_NUM_5: ret = (*(SyscallFun5)handle)(regs[REG_R0], regs[REG_R1], regs[REG_R2], regs[REG_R3], regs[REG_R4]); break; default: //7个参数的情况 ret = (*(SyscallFun7)handle)(regs[REG_R0], regs[REG_R1], regs[REG_R2], regs[REG_R3], regs[REG_R4], regs[REG_R5], regs[REG_R6]); } regs[REG_R0] = ret;//R0保存系统调用返回值 OsSaveSignalContext(regs);//保存信号上下文现场 /* Return the last value of curent_regs. This supports context switches on return from the exception. * That capability is only used with theSYS_context_switch system call. */ return regs;//返回寄存器的值 }
解读
参数是regs对应的就是R0~Rn
R7保存的是系统调用号,R0~R3保存的是SysMqOpen的四个参数
g_syscallHandle[cmd]就能查询到SYSCALL_HAND_DEF(__NR_mq_open, SysMqOpen, mqd_t, ARG_NUM_4)注册时对应的SysMqOpen函数
*(SyscallFun5)handle此时就是SysMqOpen
注意看 SysMqOpen 的参数是最开始的main函数中的mqdes = mq_open(mqname, O_CREAT | O_RDWR, S_IRUSR | S_IWUSR, &attr);由此完成了真正系统调用的过程
7. SysMqOpen
mqd_t SysMqOpen(const char *mqName, int openFlag, mode_t mode, struct mq_attr *attr)
{
mqd_t ret;
int retValue;
char kMqName[PATH_MAX + 1] = { 0 };
retValue = LOS_StrncpyFromUser(kMqName, mqName, PATH_MAX);
if (retValue < 0) {
return retValue;
}
ret = mq_open(kMqName, openFlag, mode, attr);//一个消息队列可以有多个进程向它读写消息
if (ret == -1) {
return (mqd_t)-get_errno();
}
return ret;
}
解读
此处的mq_open和main函数的mq_open其实是两个函数体实现.一个是给应用层的调用,一个是内核层使用,只是名字一样而已.
SysMqOpen是返回到OsArmA32SyscallHandleregs[REG_R0] = ret;
OsArmA32SyscallHandle再返回到_osExceptSwiHdl
_osExceptSwiHdl后面的代码是用于恢复用户模式现场和SPSR,PC等寄存器.
以上为鸿蒙系统调用的整个过程.
编辑:hfy
-
寄存器
+关注
关注
31文章
5290浏览量
119786 -
鸿蒙系统
+关注
关注
183文章
2634浏览量
66138
发布评论请先 登录
相关推荐
矩阵4x4个按键,如何把识别结果按编号01-16(十进制)显示在两个七段数码管上?
鸿蒙系统生态设备突破10亿台 超过15000个鸿蒙原生应用和元服务上架
鸿蒙Flutter实战:08-如何调试代码
总结七段数码管的分类和工作原理
七段数码管怎么判断共阴共阳
欢创播报 华为宣布鸿蒙内核已超越Linux内核
CYT2B7如何使用IIC演示驱动七段管?
七段LED显示器的工作原理与驱动方法
最新开源代码证实!“鸿蒙原生版”微信正在积极开发中

纯血鸿蒙系统,拿什么与安卓、iOS比?
鸿蒙OS和开源鸿蒙什么关系?







 工商网监
工商网监
评论