 探讨物理陀螺仪的等效9轴解决方案
探讨物理陀螺仪的等效9轴解决方案

能够确定设备的位置和移动正在成为许多便携式系统中的标准功能。诸如手机和平板电脑之类的系统使用来自加速度计和磁力计的6轴数据来启用关键功能,这些功能使消费类电子设备的界面更容易使用。
下一代设备正朝着采用陀螺仪功能的9轴传感器融合发展,以进一步改善用户体验。例如,当健康监视器可以区分步行,游泳和跑步等活动时,它可以更准确地跟踪用户。陀螺仪数据还启用了新的界面功能,例如手势识别,用户可以在其中挥动手腕来显示。
许多消费类电子设备都可以从9轴传感器融合中受益(见图1)。例如,手机,游戏系统,健康监视器和可穿戴电子设备可以实现高附加值功能,例如三维手势识别,相对于其他用户的相对定位以及运动跟踪。为此,设备需要9轴传感器数据以及有效处理数据的能力。
请注意,这些系统中的许多系统并不需要战斗机保持飞行所需的精确度。相反,他们需要一种符合成本效益的9轴传感器融合实施方案,以满足消费者应用程序的需求,以改善用户体验。有了新的MagGyros,例如Kionix的KMX62G,开发人员可以使用6轴传感器(加速度计+磁力计)提供9轴输出的等效值(加速度计+磁力计+陀螺仪),同时最大程度地降低能耗90%。实际上,Sensor Fusion使用多个传感器来填充各个传感器的盲点。
9轴传感器融合
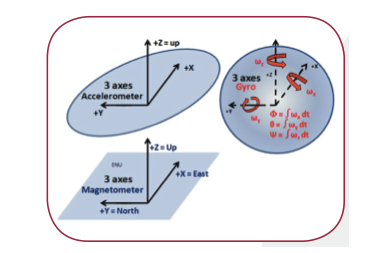
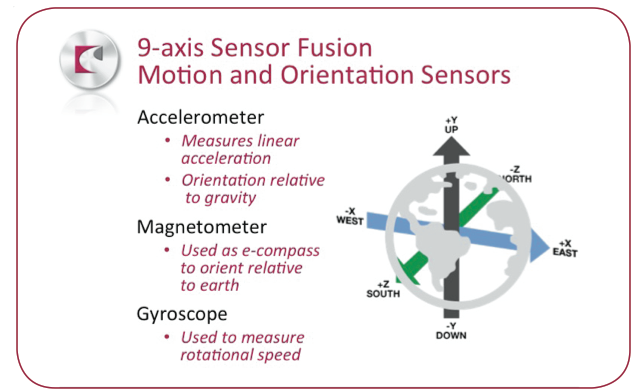
使用9轴传感器融合(来自加速度计,磁力计和陀螺仪的数据),系统可以准确地将自己定位在世界上,包括倾斜和方向以及位置和旋转的变化(请参见图2)。有效地,传感器融合使用多个传感器来填充单个传感器的盲点。
加速度计
加速度计可测量3个轴上的加速度。重要的是要注意,重力是加速度的一种形式,因此静止的物体仍然具有向下的加速度。这一事实使加速度计能够确定系统相对于“向下”的方向。
此信息还可用于确定系统的级别。许多手持式和便携式设备都使用方向来调整显示,以匹配用户如何握住设备。通常使用此功能的设备包括手机,平板电脑和笔记本电脑。
加速度计的另一个独特功能是能够判断设备是否掉落。例如,当一台笔记本电脑放在桌子上时,它检测到1G。但是,如果将笔记本电脑从桌子上敲下来,当它掉落到地板上时它将检测到0G(类似于零重力或失重模拟使飞机自由落体)。这使系统能够检测其是否掉落并且有发生碰撞的迫在眉睫的危险。对于笔记本电脑,系统可以主动将硬盘驱动器头停放在安全的位置,以防止损坏驱动器或数据。
加速度计已开发出许多其他用途,包括提高功率效率。考虑一下,几分钟内没有移动的健身追踪器可能不会被使用。然后,设备可以自行关闭电源。这个简单的用例可以在很多应用中显着提高电池寿命。
磁力计
磁力计测量磁场。它可以用在指南针中以识别地球的磁场。通过分析检测到的磁场的大小,方向和变化率,磁力计可以用来确定磁北的方向。
但是,作为独立传感器,磁力计通常无法识别磁北的方向。传统的罗盘使用带有轴承的磁棒,该轴承会限制磁棒在一个方向上对齐。适当调平外壳,使用户可以最佳地将杆与磁北对齐。在电子磁力计中,使用3轴感测来计算磁场的方向和大小。磁力计轴与被测信号之间的任何倾斜都会在报告的磁场方向上引起误差。
手持设备可以同时使用加速度计和磁力计来确定磁北。这可以通过使用加速度计识别设备的倾斜度并使用此信息来补充磁力计的读数来实现。
陀螺仪
桌上静止的加速度计可以感应到设备处于静止状态。但是,如果以加速度计为旋转中心旋转系统,则加速度计将无法检测到运动。这实际上是加速度计的一个盲点。如果系统可以访问陀螺仪,则陀螺仪可以检测到旋转。
不幸的是,对于许多应用来说,采用陀螺仪技术很难证明其合理性。在这三种类型的传感器中,陀螺仪是最大和最昂贵的。尽管传感器提供了有用的信息,但物理陀螺仪的成本,尺寸和/或功耗往往超过其所代表的值。由于这些原因,开发人员经常不得不将位置和方向功能限制为由加速度计和磁力计提供的6轴数据。
KMX62G玛格罗
如今,软件算法和低噪声,低延迟传感器的进步使得仅使用加速度计和磁力计的数据来模拟陀螺仪输出成为可能。这是MagGyros中使用的方法,其中系统根据对设备先前位置的了解来计算设备的旋转方向和速度。换句话说,当系统可以随时间跟踪方向时,它可以推断旋转数据。
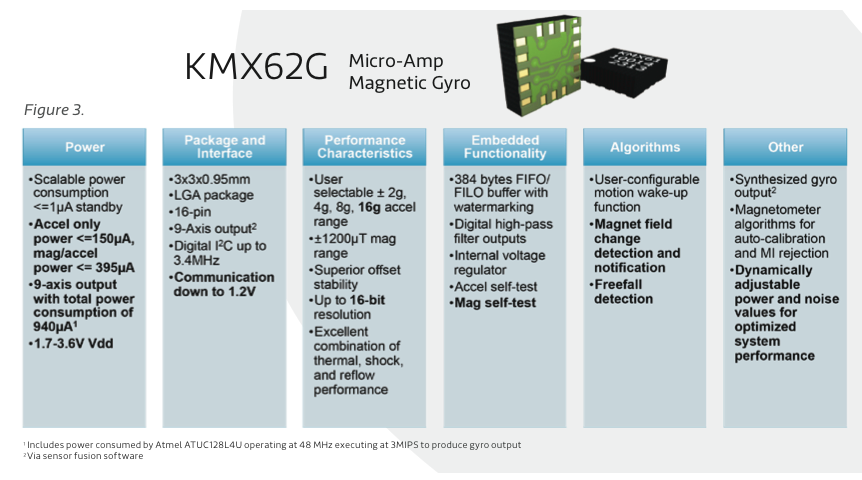
为了使开发人员能够将陀螺仪功能引入各种新应用,Kionix提供了KMX62G MagGyro。KMX62G采用了Kionix的KMX62加速器/磁力计,并通过行业领先的传感器融合软件和自动校准算法对其进行了增强(参见图3)。这使得KMX62G不仅仅是一个加速器/磁力计。它是业界首款高精度陀螺仪仿真器,提供9轴定位功能。
正确的精度水平
由于MagGyro可以估算而不是直接测量转速,因此其精度不如物理陀螺仪高。但是,陀螺仪精度最常在涉及距离的情况下发挥作用,例如在驾驶飞机时:偏离100英里一度会使您偏离航向。另一方面,诸如手势识别之类的近距离活动可以容忍相对较大的错误。因此,专注于用户体验的消费电子应用不需要物理陀螺仪的科学精度。
力量
物理陀螺仪总是在谐振,这意味着它会不断消耗功率。通常,物理陀螺仪在2.5 V或更高电压下工作,消耗4000至7000μA(见图4)。请注意,这仅适用于陀螺仪。
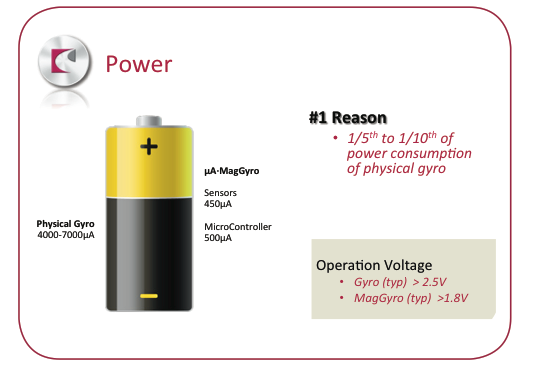
使用KMX62G MagGyro,加速度计+磁力计传感器消耗450μA。即使考虑到执行软件算法的微控制器所需的功率(〜500μA),整个MagGyro操作也小于1000μA。因此,与物理陀螺仪相比,KMX62G的能效提高了5到10倍。
启动时间
由于它们消耗大量电能,因此系统通常会尽可能频繁地关闭陀螺仪。但是,物理陀螺仪可能需要50到100ms的时间才能稳定输出。因此,使用物理陀螺仪的高能效实现会导致响应速度慢,这可能会对用户体验产生负面影响。从启动开始,KMX62G大约需要15-20ms才能开始输出9轴数据。这是由于需要收集第一批样品并进行处理。一旦建立了数据管道,此延迟将有效消除。但是,对于许多应用程序而言,KMX62G的低能耗使该设备可以在大多数时间运行,从而消除了那些重要的应用程序或用例的启动延迟。
成本
与具有物理陀螺仪的等效9轴解决方案相比,KMX62G的实现成本大大降低。它在没有物理陀螺仪和提供基于9轴定位的功能之间提供了极好的中间解决方案。
性能与品质
MagGyro的性能高度依赖于其组件的质量。考虑到为了模拟陀螺仪,MagGyro算法使用了来自加速度计和磁力计的传感器数据。任何一个传感器中的噪声都会迅速削弱陀螺仪计算的准确性。此外,相同的传感器数据随后用于传感器融合算法中以计算9轴定位。这意味着来自这些传感器的错误可能会更加复杂。因此,加速度计和磁力计的低噪声性能对于实现9轴系统的精度至关重要。
传感器之间的同步也很关键。如果加速度计的读数与在不同时间捕获的磁力计的读数相关联,则可能会导致MagGyro输出出现错误。使用外部组件时,设计紧凑的电路以确保这些传感器的精确同步可能很困难。为了简化设计,许多设计人员更喜欢通过使用将加速度计和磁力计结合在一起的单个组件(例如KMX62G)来消除同步问题。此外,磁力计的等待时间可能会因其基础技术而异。KMX62中的磁力计是市场上最低的延迟之一。这样可以实现加速度计和磁力计之间数据的精确同步,并实现了Kionix的MagGyro解决方案的高性能。
KMX62G MagGyro的最后一部分是模拟陀螺算法的软件实现。这些算法由许多功能组成,实现的质量决定了系统的整体性能,进而决定了用户体验。这些算法在主机处理器或传感器集线器上实现。提供了应用程序编程接口(API)来简化产品设计。受支持的平台包括高通的Snapdragon和Atmel的AVR UC3和基于ARM的SAM D20。KMX62G还通过了Windows 8和8.1认证。
准确的MagGyro算法实施起来相当复杂。例如,平均信号可降低噪声。但是,平均会花费时间,从而影响等待时间和响应能力。为了最大程度地提高准确性,Kionix利用了可动态调整平均值的自适应软件。当系统运行迅速且较小的错误不太明显时,平均会减少以提高响应速度。同样,当移动较小且响应性不太重要时,平均会增加以提高准确性。根据当前使用系统的方式,这可提供最佳的用户体验。
对人类用例的关注是Kionix为其KMX62G MagGyro提供的价值的一部分。它在人类感知和用户体验应用方面表现出色。它通过权衡一些性能来做到这一点,从而提高了用户的体验。通过设计其算法以提供高质量的体验,Kionix使KMX62G能够以经济高效的方式将新功能带入全新的应用领域。
评估传感器融合算法时要考虑的另一个因素是数据处理要求。要考虑的关键指标是MIPS,代码空间和RAM空间。消耗过多系统资源的算法实际上会增加系统成本。如果它们对主机处理器或传感器集线器造成过多负担,它们甚至可能影响设备的主要功能并降低整体用户体验。在软件加载方面,MagGyro算法需要少于3个MIPS。此外,它可以在具有低至128 KB闪存和32 KB RAM的系统上运行。这是传感器校准,磁异常抑制,传感器融合和合成陀螺仪计算所需的全部。对于能够提供9轴数据(包括陀螺仪功能)的价值而言,这是一个合理的负担。
随着KMX62G MagGyro的问世,现在可以从陀螺仪功能中受益的下一代消费电子系统是一种经济高效的选择。通过权衡适当的性能水平,与基于物理陀螺仪的系统相比,KMX62G具有更低的成本,更高的电源效率和更小的占位空间。
编辑:hfy
-
传感器
+关注
关注
2578文章
55811浏览量
795255 -
陀螺仪
+关注
关注
44文章
901浏览量
102196 -
加速度计
+关注
关注
6文章
826浏览量
48380
发布评论请先 登录
稳如磐石,控于毫厘:MEMS三轴陀螺仪稳控新高度

单轴MEMS陀螺仪:精准导航与稳定的核心

STM32H5开发陀螺仪LSM6DSV16X(1)----轮询获取陀螺仪数据

多轴陀螺仪怎么选?

什么是光纤陀螺仪?陀螺仪有哪些作用?
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

MEMS陀螺仪如何实现高精度寻北?
**无人机飞控如何靠三轴MEMS陀螺仪实现稳定飞行?**
MEMS陀螺仪正在取代光纤陀螺仪?
MEMS陀螺仪如何成为无人机精准飞行的核心引擎?
低成本MEMS陀螺仪,如何挑战工业级精度?

振动陀螺仪传感器的工作原理
陀螺仪在钻井或测井中有何用途?

MEMS陀螺仪的寻北原理是什么?精度如何?




评论