 浅谈CAN协议的通信方法
浅谈CAN协议的通信方法
本文档介绍了使用M16C / 6N,M16C / 1N,M16C / 29或R8C / 22,23组微型计算机执行CAN通信时应遵循的步骤。本文档适用于M16C / 6N,M16C / 1N,M16C / 29或R8C / 22,23组微型计算机(以下分别称为6N,1N,29或R8C / 22,23)。6N组进一步分为六个子组:6N4、6N5、6NK,6NL,6NM和6NN。6N5、6NL,6NN,1N,29和R8C / 22,23仅具有CAN0,因此与CAN1有关的描述不适用于这些组。
CAN位时序
在CAN协议中,通信帧中的每个位都由四个段组成。
图1显示了一个位的段组成以及其中的采样点。在这些段中,使用传播时间段(以下称为PTS),相位缓冲段1(以下称为PBS1)和相位缓冲段2(以下称为PBS2)来指定采样点,以便可以对每个位进行采样的时间可以通过更改这些细分的值来进行更改。设置此时序的最小单位称为时间量子(以下称为Tq),由提供给CAN模块的时钟频率和波特率预分频器的N分频值确定。
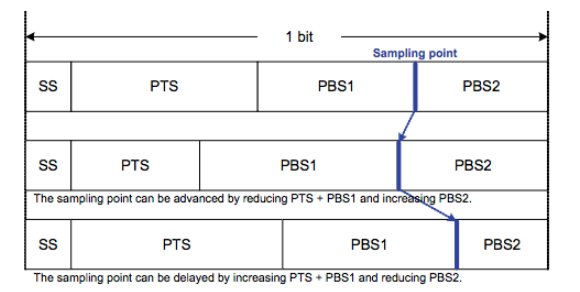
片段的组成部分和采样点
位时序条件
下面介绍如何设置每个段以及适用于段设置的限制。
(1)各段设置
- SS =固定为1 Tq
- PTS =在1至8 Tq的范围内设置。
- PBS1 =设置在2至8 Tq的范围内。
- PBS2 =设置在2至8 Tq的范围内。
- SJW =在1至4 Tq的范围内设置。
- SS + PTS + PBS1 + PBS2 = 8至25 Tq
(2)PBS1和PBS2的局限性
- PBS1≥PBS2
- PBS1≥SJW
- SJW = 1时PBS2≥2
- 当2≤SJW≤4时PBS2≥SJW
如何同步位
CAN协议的通信方法为不归零(NRZ)。没有同步信号添加到每个位的开头或结尾。
硬件同步(不发送或接收消息时实现的同步)*
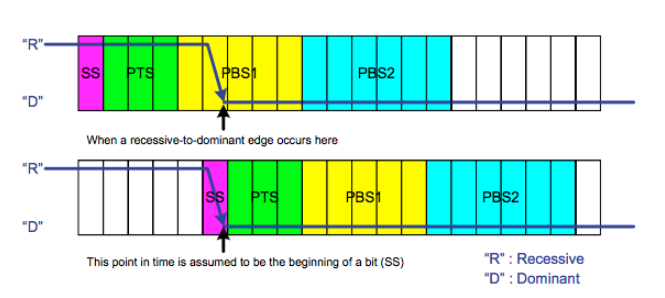
当在帧间空间中检测到隐性到显性边缘时,该时间点被识别为比特(SS)的开始,基于该比特开始同步。这称为硬件同步。图2显示了硬件同步的机制。
编辑:hfy
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN通信
+关注
关注
5文章
93浏览量
17832 -
CAN
+关注
关注
57文章
2744浏览量
463664 -
计算机
+关注
关注
19文章
7492浏览量
87921
发布评论请先 登录
相关推荐
CAN总线通信协议的基础知识
本文将介绍CAN总线通信协议的基础知识,目前的内容仅为通用的协议部分,暂不涉及具体的外设模块的用法。研究通信协议的具体内容,主要是看建立通信

STM32 CAN通信协议
CAN 简介CAN 是控制器区域网络(Controller Area Network) 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒
发表于 08-19 09:31
CAN通信协议简析
CAN 简介CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO 国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便
发表于 08-19 06:29
CAN总线通信协议分析实现
的CAN总线通信协议,才能完成数据准确可靠的传输。目前,也存在一些CAN总线产品开发公司定制的协议,如:CANOpen,DeviceNet等,与其产品捆绑在一起,而且用户的需求不同,其
发表于 01-08 15:01
•9次下载

can的通信协议主要由什么完成
CAN(Controller Area Network)是一种基于消息的通信协议,主要用于汽车和工业领域。它是一种局域网技术,允许多个设备在同一网络上进行通信。CAN





 工商网监
工商网监
评论