 基于AP3216C芯片的三合一整合型光感测器设计
基于AP3216C芯片的三合一整合型光感测器设计
1、前言
开发板上有AP3216三合一整合型光感测器,看了看出厂SDK包中并未添加相关驱动。本次我们就一起来学习一下。
2、AP3216简介
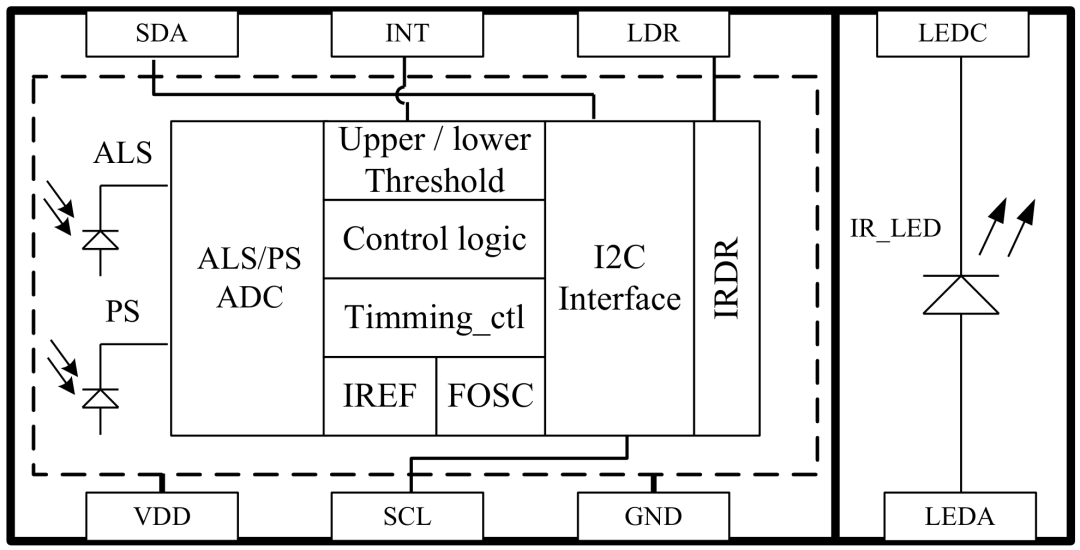
AP3216C 芯片集成了光强传感器( ALS: Ambient Light Sensor),接近传感器( PS: Proximity Sensor),还有一个红外 LED( IR LED)。
这个芯片设计的用途是给手机之类的使用,比如:返回当前环境光强以便调整屏幕亮度;用户接听电话时,将手机放置在耳边后,自动关闭屏幕避免用户误触碰 。

3、IIC驱动简介
Linux下IIC有两种驱动方式:一种是按照字符设备驱动方式来驱动IIC;另一种是走Linux下IIC的框架。按照字符设备驱动的方式可以查阅这一篇文章:Linux IIC 字符设备 驱动例子。
这里我们浅浅地(真的很浅~~)了解学习一下第二种方式,因为找到的AP3216的驱动就是基于IIC驱动框架的,哈哈。
IIC驱动框架图如
IIC驱动框架可大体分为两大部分:
① I2C 总线驱动:SOC 的 I2C 控制器驱动,也叫做 I2C 适配器驱动。
② I2C 设备驱动:针对具体的 I2C 设备而编写的驱动。
其中,访问抽象层与I2C核心层数据I2C 总线驱动部分;driver驱动层属于I2C设备驱动部分。
上面框图对应的代码调用层次图如:
下面的AP3216驱动可以对照这张图来看看。
4、AP3216实验
我们使用设备树来描述AP3216设备信息,首先我们没有在设备树中添加AP3216相关节点时,我们系统的I2C设备如:
添加I2C pinctrl,板子上AP3216接的是I2C1:
配置寄存器的值都设为0x4001b8b0,这一段是什么意思我们在什么是Pinctrl子系统及GPIO子系统?这篇笔记中也有写到,就是几个寄存器及其配置。
接下来在i2c1节点下添加ap3216节点:
编译设备树,传到开发板上,重启。此时我们系统的I2C设备有:
可见,新增的AP3216 I2C设备名就是我们设备树里设置的。
下面编写AP3216驱动(以下代码来源于网络):
ap3216.c:
#include#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include"ap3216creg.h" /*************************************************************** 文件名:ap3216c.c 描述:AP3216C驱动程序 ***************************************************************/ #defineAP3216C_CNT1 #defineAP3216C_NAME"ap3216c" structap3216c_dev{ dev_tdevid;/*设备号*/ structcdevcdev;/*cdev*/ structclass*class;/*类*/ structdevice*device;/*设备*/ structdevice_node*nd;/*设备节点*/ intmajor;/*主设备号*/ void*private_data;/*私有数据*/ unsignedshortir,als,ps;/*三个光传感器数据*/ }; staticstructap3216c_devap3216cdev; /* *@description:从ap3216c读取多个寄存器数据 *@param-dev:ap3216c设备 *@param-reg:要读取的寄存器首地址 *@param-val:读取到的数据 *@param-len:要读取的数据长度 *@return:操作结果 */ staticintap3216c_read_regs(structap3216c_dev*dev,u8reg,void*val,intlen) { intret; structi2c_msgmsg[2]; structi2c_client*client=(structi2c_client*)dev->private_data; /*msg[0]为发送要读取的首地址*/ msg[0].addr=client->addr;/*ap3216c地址*/ msg[0].flags=0;/*标记为发送数据*/ msg[0].buf=®/*读取的首地址*/ msg[0].len=1;/*reg长度*/ /*msg[1]读取数据*/ msg[1].addr=client->addr;/*ap3216c地址*/ msg[1].flags=I2C_M_RD;/*标记为读取数据*/ msg[1].buf=val;/*读取数据缓冲区*/ msg[1].len=len;/*要读取的数据长度*/ ret=i2c_transfer(client->adapter,msg,2); if(ret==2){ ret=0; }else{ printk("i2crdfailed=%dreg=%06xlen=%d\n",ret,reg,len); ret=-EREMOTEIO; } returnret; } /* *@description:向ap3216c多个寄存器写入数据 *@param-dev:ap3216c设备 *@param-reg:要写入的寄存器首地址 *@param-val:要写入的数据缓冲区 *@param-len:要写入的数据长度 *@return:操作结果 */ statics32ap3216c_write_regs(structap3216c_dev*dev,u8reg,u8*buf,u8len) { u8b[256]; structi2c_msgmsg; structi2c_client*client=(structi2c_client*)dev->private_data; b[0]=reg;/*寄存器首地址*/ memcpy(&b[1],buf,len);/*将要写入的数据拷贝到数组b里面*/ msg.addr=client->addr;/*ap3216c地址*/ msg.flags=0;/*标记为写数据*/ msg.buf=b;/*要写入的数据缓冲区*/ msg.len=len+1;/*要写入的数据长度*/ returni2c_transfer(client->adapter,&msg,1); } /* *@description:读取ap3216c指定寄存器值,读取一个寄存器 *@param-dev:ap3216c设备 *@param-reg:要读取的寄存器 *@return:读取到的寄存器值 */ staticunsignedcharap3216c_read_reg(structap3216c_dev*dev,u8reg) { u8data=0; ap3216c_read_regs(dev,reg,&data,1); returndata; #if0 structi2c_client*client=(structi2c_client*)dev->private_data; returni2c_smbus_read_byte_data(client,reg); #endif } /* *@description:向ap3216c指定寄存器写入指定的值,写一个寄存器 *@param-dev:ap3216c设备 *@param-reg:要写的寄存器 *@param-data:要写入的值 *@return:无 */ staticvoidap3216c_write_reg(structap3216c_dev*dev,u8reg,u8data) { u8buf=0; buf=data; ap3216c_write_regs(dev,reg,&buf,1); } /* *@description :读取AP3216C的数据,读取原始数据,包括ALS,PS和IR, 注意! *:如果同时打开ALS,IR+PS的话两次数据读取的时间间隔要大于112.5ms *@param-ir:ir数据 *@param-ps:ps数据 *@param-ps:als数据 *@return :无。 */ voidap3216c_readdata(structap3216c_dev*dev) { unsignedchari=0; unsignedcharbuf[6]; /*循环读取所有传感器数据*/ for(i=0;i< 6; i++) { buf[i] = ap3216c_read_reg(dev, AP3216C_IRDATALOW + i); } if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 */ dev->ir=0; else/*读取IR传感器的数据*/ dev->ir=((unsignedshort)buf[1]<< 2) | (buf[0] & 0X03); dev->als=((unsignedshort)buf[3]<< 8) | buf[2]; /* 读取ALS传感器的数据 */ if(buf[4] & 0x40) /* IR_OF位为1,则数据无效 */ dev->ps=0; else/*读取PS传感器的数据*/ dev->ps=((unsignedshort)(buf[5]&0X3F)<< 4) | (buf[4] & 0X0F); } /* * @description : 打开设备 * @param - inode : 传递给驱动的inode * @param - filp : 设备文件,file结构体有个叫做private_data的成员变量 * 一般在open的时候将private_data指向设备结构体。 * @return : 0 成功;其他 失败 */ static int ap3216c_open(struct inode *inode, struct file *filp) { filp->private_data=&ap3216cdev; /*初始化AP3216C*/ ap3216c_write_reg(&ap3216cdev,AP3216C_SYSTEMCONG,0x04);/*复位AP3216C*/ mdelay(50);/*AP3216C复位最少10ms*/ ap3216c_write_reg(&ap3216cdev,AP3216C_SYSTEMCONG,0X03);/*开启ALS、PS+IR*/ return0; } /* *@description:从设备读取数据 *@param-filp:要打开的设备文件(文件描述符) *@param-buf:返回给用户空间的数据缓冲区 *@param-cnt:要读取的数据长度 *@param-offt:相对于文件首地址的偏移 *@return:读取的字节数,如果为负值,表示读取失败 */ staticssize_tap3216c_read(structfile*filp,char__user*buf,size_tcnt,loff_t*off) { shortdata[3]; longerr=0; structap3216c_dev*dev=(structap3216c_dev*)filp->private_data; ap3216c_readdata(dev); data[0]=dev->ir; data[1]=dev->als; data[2]=dev->ps; err=copy_to_user(buf,data,sizeof(data)); return0; } /* *@description:关闭/释放设备 *@param-filp:要关闭的设备文件(文件描述符) *@return:0成功;其他失败 */ staticintap3216c_release(structinode*inode,structfile*filp) { return0; } /*AP3216C操作函数*/ staticconststructfile_operationsap3216c_ops={ .owner=THIS_MODULE, .open=ap3216c_open, .read=ap3216c_read, .release=ap3216c_release, }; /* *@description:i2c驱动的probe函数,当驱动与 *设备匹配以后此函数就会执行 *@param-client:i2c设备 *@param-id:i2c设备ID *@return:0,成功;其他负值,失败 */ staticintap3216c_probe(structi2c_client*client,conststructi2c_device_id*id) { /*1、构建设备号*/ if(ap3216cdev.major){ ap3216cdev.devid=MKDEV(ap3216cdev.major,0); register_chrdev_region(ap3216cdev.devid,AP3216C_CNT,AP3216C_NAME); }else{ alloc_chrdev_region(&ap3216cdev.devid,0,AP3216C_CNT,AP3216C_NAME); ap3216cdev.major=MAJOR(ap3216cdev.devid); } /*2、注册设备*/ cdev_init(&ap3216cdev.cdev,&ap3216c_ops); cdev_add(&ap3216cdev.cdev,ap3216cdev.devid,AP3216C_CNT); /*3、创建类*/ ap3216cdev.class=class_create(THIS_MODULE,AP3216C_NAME); if(IS_ERR(ap3216cdev.class)){ returnPTR_ERR(ap3216cdev.class); } /*4、创建设备*/ ap3216cdev.device=device_create(ap3216cdev.class,NULL,ap3216cdev.devid,NULL,AP3216C_NAME); if(IS_ERR(ap3216cdev.device)){ returnPTR_ERR(ap3216cdev.device); } ap3216cdev.private_data=client; return0; } /* *@description:i2c驱动的remove函数,移除i2c驱动的时候此函数会执行 *@param-client:i2c设备 *@return:0,成功;其他负值,失败 */ staticintap3216c_remove(structi2c_client*client) { /*删除设备*/ cdev_del(&ap3216cdev.cdev); unregister_chrdev_region(ap3216cdev.devid,AP3216C_CNT); /*注销掉类和设备*/ device_destroy(ap3216cdev.class,ap3216cdev.devid); class_destroy(ap3216cdev.class); return0; } /*传统匹配方式ID列表*/ staticconststructi2c_device_idap3216c_id[]={ {"iot,ap3216c",0}, {} }; /*设备树匹配列表*/ staticconststructof_device_idap3216c_of_match[]={ {.compatible="iot,ap3216c"}, {/*Sentinel*/} }; /*i2c驱动结构体*/ staticstructi2c_driverap3216c_driver={ .probe=ap3216c_probe, .remove=ap3216c_remove, .driver={ .owner=THIS_MODULE, .name="ap3216c", .of_match_table=ap3216c_of_match, }, .id_table=ap3216c_id, }; /* *@description:驱动入口函数 *@param:无 *@return:无 */ staticint__initap3216c_init(void) { intret=0; ret=i2c_add_driver(&ap3216c_driver); returnret; } /* *@description:驱动出口函数 *@param:无 *@return:无 */ staticvoid__exitap3216c_exit(void) { i2c_del_driver(&ap3216c_driver); } /*module_i2c_driver(ap3216c_driver)*/ module_init(ap3216c_init); module_exit(ap3216c_exit); MODULE_LICENSE("GPL"); MODULE_AUTHOR("pjw");
驱动详解可查阅注释及配合上诉的I2C驱动框架的框图及数据手册理解。
ap3216creg.h:
#ifndefAP3216C_H #defineAP3216C_H /*************************************************************** 文件名:ap3216creg.h 描述:AP3216C寄存器地址描述头文件 ***************************************************************/ #defineAP3216C_ADDR0X1E/*AP3216C器件地址*/ /*AP3316C寄存器*/ #defineAP3216C_SYSTEMCONG0x00/*配置寄存器*/ #defineAP3216C_INTSTATUS0X01/*中断状态寄存器*/ #defineAP3216C_INTCLEAR0X02/*中断清除寄存器*/ #defineAP3216C_IRDATALOW0x0A/*IR数据低字节*/ #defineAP3216C_IRDATAHIGH0x0B/*IR数据高字节*/ #defineAP3216C_ALSDATALOW0x0C/*ALS数据低字节*/ #defineAP3216C_ALSDATAHIGH0X0D/*ALS数据高字节*/ #defineAP3216C_PSDATALOW0X0E/*PS数据低字节*/ #defineAP3216C_PSDATAHIGH0X0F/*PS数据高字节*/ #endif
ap3216应用:
ap3216cApp.c:
#include"stdio.h" #include"unistd.h" #include"sys/types.h" #include"sys/stat.h" #include"sys/ioctl.h" #include"fcntl.h" #include"stdlib.h" #include"string.h" #include#include #include #include #include /*************************************************************** 文件名:ap3216cApp.c 描述: ap3216c设备测试APP。 使用方法:./ap3216cApp /dev/ap3216c ***************************************************************/ /* *@description:main主程序 *@param-argc:argv数组元素个数 *@param-argv:具体参数 *@return:0成功;其他失败 */ intmain(intargc,char*argv[]) { intfd; char*filename; unsignedshortdatabuf[3]; unsignedshortir,als,ps; intret=0; if(argc!=2){ printf("ErrorUsage!\r\n"); return-1; } filename=argv[1]; fd=open(filename,O_RDWR); if(fd< 0) { printf("can't open file %s\r\n", filename); return -1; } while (1) { ret = read(fd, databuf, sizeof(databuf)); if(ret == 0) { /* 数据读取成功 */ ir = databuf[0]; /* ir传感器数据 */ als = databuf[1]; /* als传感器数据 */ ps = databuf[2]; /* ps传感器数据 */ printf("ir = %d, als = %d, ps = %d\r\n", ir, als, ps); } usleep(200000); /*100ms */ } close(fd); /* 关闭文件 */ return 0; }
编写Makefile,从之前的文章=======拷贝过来修改:
KERN_DIR=/home/book/100ask_imx6ull-sdk/Linux-4.9.88 all: make-C$(KERN_DIR)M=`pwd`modules $(CROSS_COMPILE)gcc-oap3216cAppap3216cApp.c clean: make-C$(KERN_DIR)M=`pwd`modulesclean rm-rfmodules.order rm-fap3216cApp #参考内核源码drivers/char/ipmi/Makefile #要想把a.c,b.c编译成ab.ko,可以这样指定: #ab-y:=a.ob.o #obj-m+=ab.o obj-m+=ap3216.o
编译得到ap3216.ko及ap3216cApp,传到板子上运行:
以上就是本次的实验分享,如果文章对你有帮助,欢迎转发,谢谢!
参考资料:
1、https://blog.csdn.net/weixin_34032792/article/details/85582751?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-2.control&dist_request_id=1328690.367.16165120737124801&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-2.control
2、https://blog.csdn.net/p1279030826/article/details/106459333
3、《嵌入式Linux应用开发完全手册》
编辑:hfy
-
接近传感器
+关注
关注
5文章
192浏览量
24489 -
I2C
+关注
关注
28文章
1495浏览量
124792 -
I2C总线
+关注
关注
8文章
406浏览量
61211 -
光感测器
+关注
关注
0文章
5浏览量
7155
发布评论请先 登录
相关推荐
移动电源方案究竟硬件三合一还是软件三合一?
同步整流 移动电源三合一问题
移动电源硬件三合一方案和软件三合一方案对比
新人提问:移动电源方案软件三合一好还是硬件三合一好?
Vishay推出首款三合一环境光传感器 VCNL4000


环境温湿度及光照三合一传感器设计

移动电源三合一方案解析_移动电源三合一方案的优点介绍
移动电源三合一方案都有哪些_移动电源三合一方案哪种最稳定


AP3216C三合一环境传感器使用指南
WH4530A三合一光距感 接近传感芯片






 工商网监
工商网监
评论