 什么是PID?位置式PID与增量式PID有何不同
什么是PID?位置式PID与增量式PID有何不同
1PID控制算法
什么是PID
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备.在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。每一项完成不同任务,对系统功能产生不同的影响。它的结构简单,参数易 于调整,是控制系统中经常采用的控制算法。
PID:比例单元(P)、积分单元(I)和微分单元(D)组成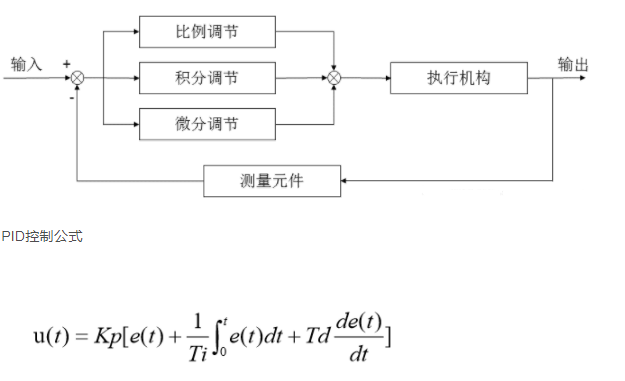
其中:u(t)为控制器输出的控制量;(输出)
e(t)为偏差信号,它等于给定量与输出量之差;(输入)
KP 为比例系数;(对应参数 P)
TI 为积分时间常数;(对应参数I)
TD 为微分时间常数。(对应参数 D)
数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法。
位置式 PID 算法 :
e(k): 用户设定的值(目标值) - 控制对象的当前的状态值
比例P : e(k)
积分I : ∑e(i) 误差的累加
微分D : e(k) - e(k-1) 这次误差-上次误差
也就是位置式PID是当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制
因为有误差积分 ∑e(i),一直累加,也就是当前的输出u(k)与过去的所有状态都有关系,用到了误差的累加值;(误差e会有误差累加),输出的u(k)对应的是执行机构的实际位置,,一旦控制输出出错(控制对象的当前的状态值出现问题 ),u(k)的大幅变化会引起系统的大幅变化
并且位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅
所以在使用位置式PID时,一般我们直接使用PD控制
而位置式 PID 适用于执行机构不带积分部件的对象,如舵机和平衡小车的直立和温控系统的控制
结合代码可以很好理解
typedef struct PID
{
float P,I,D,limit;
}PID;
typedef struct Error
{
float Current_Error;//当前误差
float Last_Error;//上一次误差
float Previous_Error;//上上次误差
}Error;
/*!
* @brief 位置式PID
* @since v1.0
* *sptr :误差参数
* *pid: PID参数
* NowPlace:当前位置
* Point: 预期位置
*/
// 位置式PID控制
float PID_Realize(Error *sptr,PID *pid, int32 NowPlace, float Point)
{
int32 iError, // 当前误差
Realize; //实际输出
iError = Point - NowPlace; // 计算当前误差
sptr->Current_Error += pid->I * iError; // 误差积分
sptr->Current_Error = sptr->Current_Error > pid->limit?pid->limit:sptr->Current_Error;//积分限幅
sptr->Current_Error = sptr->Current_Error <-pid->limit?-pid->limit:sptr->Current_Error;
Realize = pid->P * iError //比例P
+ sptr->Current_Error //积分I
+ pid->D * (iError - sptr->Last_Error); //微分D
sptr->Last_Error = iError; // 更新上次误差
return Realize; // 返回实际值
}
增量式PID
比例P : e(k)-e(k-1) 这次误差-上次误差
积分I : e(i) 误差
微分D : e(k) - 2e(k-1)+e(k-2) 这次误差-2*上次误差+上上次误差
增量式PID根据公式可以很好地看出,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差, 即可由公式求出控制增量
而得出的控制量▲u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差 没有误差累加
也就是说,增量式PID中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作
总结:增量型 PID,是对位置型 PID 取增量,这时控制器输出的是相邻两次采样时刻所计算的位置值
之差,得到的结果是增量,即在上一次的控制量的基础上需要增加(负值意味减少)控制量。
typedef struct PID
{
float P,I,D,limit;
}PID;
typedef struct Error
{
float Current_Error;//当前误差
float Last_Error;//上一次误差
float Previous_Error;//上上次误差
}Error;
/*!
* @brief 增量式PID
* @since v1.0
* *sptr :误差参数
* *pid: PID参数
* NowPlace:实际值
* Point: 期望值
*/
// 增量式PID电机控制
int32 PID_Increase(Error *sptr, PID *pid, int32 NowPlace, int32 Point)
{
int32 iError, //当前误差
Increase; //最后得出的实际增量
iError = Point - NowPlace; // 计算当前误差
Increase = pid->P * (iError - sptr->Last_Error) //比例P
+ pid->I * iError //积分I
+ pid->D * (iError - 2 * sptr->Last_Error + sptr->Previous_Error); //微分D
sptr->Previous_Error = sptr->Last_Error; // 更新前次误差
sptr->Last_Error = iError; // 更新上次误差
return Increase; // 返回增量
}
增量式与位置式区别:
1增量式算法不需要做累加,控制量增量的确定仅与最近几次偏差采样值有关,计算误差对控制 量计算的影响较小。而位置式算法要用到过去偏差的累加值,容易产生较大的累加误差。
2增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作 影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。 而位置式的输出直接对应对象的输出,因此对系统影响较大。
3增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
4在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅
位置式PID优缺点:
优点:
①位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用
缺点:
①每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
增量式PID优缺点:
优点:
①误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
②手动/自动切换时冲击小,便于实现无扰动切换。当计算机故障时,仍能保持原值。
③算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关。
缺点:
①积分截断效应大,有稳态误差;
②溢出的影响大。有的被控对象用增量式则不太好;
编辑:hfy
-
电机控制
+关注
关注
3537文章
1884浏览量
268993 -
PID
+关注
关注
35文章
1473浏览量
85629
发布评论请先 登录
相关推荐
请问一下STM MCSDK_v5.3.2的PID(PI_Controller() function)是增量式PID或位置式PID?
教你用C语言实现位置式PID和增量式PID
请问是用位置式PID好还是增量式PID好?
使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载






 工商网监
工商网监
评论