 相机标定——标定图片拍摄规范
相机标定——标定图片拍摄规范
相机标定是进行视觉测量和定位的基础工作之一,标定参数准确与否直接关系到整个系统的精度,为此根据自己项目中的经验及参考相关的商用视觉软件的做法将相机标定过程中标定图片的获取过程中需要注意的问题总结如下:
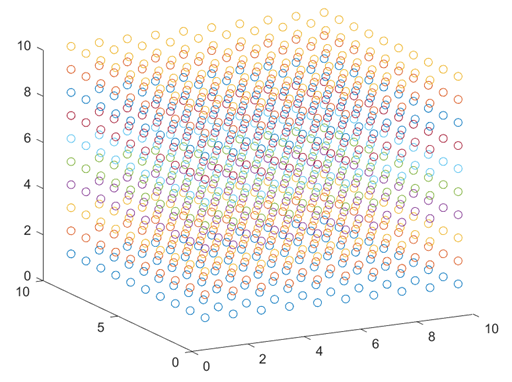
标定板拍摄的张数要能覆盖整个测量空间及整个测量视场,把相机图像分成四个象限(如图1所示),应保证拍摄的标定板图像均匀分布在四个象限中,且在每个象限中建议进行不同方向的两次倾斜,图2是一组推荐摆放方式图片。
标定图片的数量通常在15~25张之间,图像数量太少,容易导致标定参数不准确。
圆或者圆环特征的像素数尽量大于20,标定板的成像尺寸应大致占整幅画面的1/4
用辅助光源对标定板进行打光,保证标定板的亮度足够且均匀
标定板成像不能过爆,过爆会导致特征轮廓的提取的偏移,从而导致圆心提取不准确。
标定板特征成像不能出现明显的离焦距,出现离焦时可通过调整调整标定板的距离、光圈的大小和像距(对于定焦镜头,通常说的调焦就是指调整像距)。
标定过程,相机的光圈、焦距不能发生改变,改变需要重新标定。
图1 图像的四象限位
图2 标定板合适摆放位置
责任编辑:lq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
图像
+关注
关注
2文章
1082浏览量
40396 -
相机
+关注
关注
4文章
1342浏览量
53479 -
视觉测量
+关注
关注
0文章
8浏览量
6870
原文标题:相机标定——标定图片拍摄规范
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
传感器静态标定的主要步骤是什么
传感器静态标定的主要步骤通常包括以下几个方面: 一、准备阶段 确定标定范围 :首先,需要明确传感器的全量程(即测量范围),这是标定工作的基础。 准备标准设备 :利用标准仪器或设备产生已知的非电量(如
使用基于模型的标定提高开发效率
嵌入式系统中往往包含大量的可标定参数,这些参数通常以单值、曲线(1 维表格)、MAP 图(2 维表格)的形式存在。最终产品的质量不仅取决于算法的设计,也取决于这些可标定参数的值设置是否达到最优。
基于CW32的仪表精度测量实现(三):标定与校准
标定的概念 标定是一种校准过程,它通过与已知的标准或参考值进行比较来确保测量设备、仪器或系统的准确性和可靠性。这个过程涉及调整设备,以消除系统误差和提高测量结果与真实值的一致性,从而确保数据的精确度



什么是电机电控标定?到底标的啥?
什么是电机电控标定?到底标的啥? 电机电控标定是指对电机和电控系统进行精确的参数设定和校准的过程。这个过程旨在确保电机和电控系统能够以准确可靠的方式工作,并实现所需的性能和功能。标定的对象主要包括
相机标定中的坐标变换原理难点分析
相机标定中的基本坐标系有:像素坐标系、图像坐标系、相机坐标系、世界坐标系,这些坐标系之间都有一定的转换关系,若这些转换关系已知,就可以得到世界坐标(棋盘上的点)和像素坐标之间的关系。
发表于 12-19 10:42
•1195次阅读

采集激光雷达和相机的初始标定数据
包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。 本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重

相机标定中各种标定板介绍以及优缺点分析
在选择标定板时,一个重要的考虑因素是它的物理尺寸。这最终关系到最终应用的测量视场(FOV)。这是因为相机需要聚焦在特定的距离上标定。改变焦距长度会轻微地影响对焦距离,这会影响之前的标定

浅析传感器的外参标定和在线标定问题
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定问题。
发表于 11-20 15:45
•755次阅读

IMU/GNSS与车体外参标定
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定问题。 下图是我们常用的几个坐标系,而对于常用的外参






 工商网监
工商网监
评论