 单个相机在指定平面上的尺寸测量
单个相机在指定平面上的尺寸测量
用单个相机在指定平面上的尺寸测量
在HALCON中很容易从图像中获得在世界坐标中的非变形测量。一般情况下,如果相同的物体在同一时刻,在不同的空间位置下,用相机拍摄两个或更多的图像,才能完成这样的测量任务。这就是所谓的立体视觉方法。
在工业检测中,我们通常仅仅有一个可用的相机,时间的约束不允许我们去运用在立体图像上去找对应点这样昂贵的处理(所谓的立体匹配处理)。
然而,对于通过远心镜头和位于已知平面的物体获取的物体,其是有可能获得在世界坐标系统的测量的。例如,对于针孔相机,在一个拼接线上。这两个任务可以通过一条光线与平面的相互作用来很好的解决。
通过这样,是有可能完成对在一个平面的物体测量,甚至当平面相对于光轴是倾斜的时候。仅仅的先决条件是相机已经被标定。在HALCON中,标定过程是很容易。
最容易的方法去执行标定就是利用HALCON的标准标准版。你仅仅需要擦剂几张标定板的图像(如图1所示),这里,在图像上,标定板已经被直接放在了测量平面上。
图1:HALCON标定板
第一个例子
下面的程序展示了去标定相机,并利用标定结果去转换测量到3D世界坐标。
首先,我们制定标定的一般参数。

然后,标定板的图像被读取。借助算子find_calib_object,标定板被搜索,标志点的轮廓和中心被提取到,标定板的位姿被估计到。获取的信息被存储在标定的数据模型中。

现在,我们用算子calibrate_camera来执行实际的标定。

随后,我们可以访问标定结果,例如相机内参和在参考图像下标定板的位姿。

位姿被用来作为相机外参,例如在相机坐标中3D世界坐标系统的位姿。在例子中,世界坐标系统被定位在尺子上(见图2).为了抵消标定板的厚度,位姿通过一个对应的值而移动。

现在,我们执行了测量。为此,我们通过标定板,获得了一种没有遮挡尺子的额外图像:
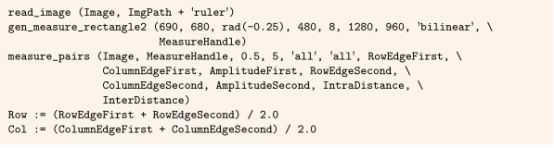
借助相机的内参和外参,通过算子image_points_to_world_plane就可以将测量结果转换到3D世界坐标。

图2:在标定以后,尺子上的标记点被测量,借助标定结果,测量被转化到3D世界坐标中
责任编辑:YYX
-
相机
+关注
关注
4文章
1370浏览量
53991 -
测量
+关注
关注
10文章
4963浏览量
111920
原文标题:HALCON高级篇:单个相机的尺寸测量
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
图像尺寸测量优势:数量识别

金属检测传感器怎么测量金属的尺寸,金属检测测量的核心原理
VirtualLab Fusion案例:高NA傅里叶单分子成像显微镜
图像尺寸测量仪在人造骨骼尺寸测量中的创新应用

优可测一键尺寸测量仪:磁芯尺寸测量的优选方案 | 行业应用

光谱共焦应用测量之手机玻璃屏幕平面度测量
测长机在测量长度尺寸方面有哪些优势?

如何根据产品的表面尺寸测量需求选择合适的测量设备

精准测量第一步:如何选择合适的几何尺寸测量仪器?

友思特案例 | 自研创新!三维工件尺寸测量及点云处理解决方案

M-G364PD惯性测量单元:相机及微小层面的革命性应用
共聚焦、光学显微镜与测量显微镜的区分
机器视觉应用尺寸检测基础解析






 工商网监
工商网监
评论