 如何使用Intel的交钥匙型LiDAR相机来探测视野中与物体的距离
如何使用Intel的交钥匙型LiDAR相机来探测视野中与物体的距离

在近年,越来越多工业自动化领域的机器设计者,需要实施某种形式的机器视觉,以确定距特定视野内所有物体的距离。实施这种形式的机器视觉进行测距的原因可能会有所不同,包括感测一般环境中的变化或侵入、生产线上的物体距离,或者操作人员或机器人对危险的整体防护。尤其在工业仓库中,室内车辆正在实施机器视觉,以实现自动驾驶、物体定位与识别以及障碍物的检测与躲避。
最常见的室内机器视觉物体距离检测方法是光探测和测距 (LiDAR),在这种方法中,使用激光来测量物体之间的距离。LiDAR 测量反射激光的返回时间和波长,以确定到每个点的距离。但是,LiDAR 机器视觉算法非常复杂且学习曲线陡峭,需要机器视觉专家编写应用代码。 本文将向开发人员展示如何针对这些应用使用 Intel 的交钥匙型 LiDAR 相机来探测视野中与物体的距离。它解决了在不了解机器视觉技术和算法复杂性的情况下,将机器视觉快速添加到新系统或现有系统中的问题。然后,它将展示如何通过高速 USB 3.1 将 Intel LiDAR 相机与 UDOO 中的单板计算机 (SBC) 配对。
室内工业自动化环境中的机器视觉
随着更多设备进入车间以及更多的操作员和用品,工业自动化室内环境变得越来越动态化。所有机器、传感器和更高水平的自动化的目标均是提高效率,同时确保操作员的安全。 许多情况下,添加更多的传感器用于检测目标区域中的物体,包括人。生产线上的物体可以通过多种方式进行检测,包括检测由于物体通过而引起的环境光变化的基本光传感器、物体重力作用下的机械开关或者发生产品滚动时穿过已中断的生产线的一束光。虽然这些方法适用于基本的物体检测,但随着自动化程度越来越高,就需要类似于人眼的更复杂的视觉检测功能。 机器视觉大致类似于为机器添加视力,以识别不同的颜色,区分物体并分辨多种运动。但是,一种常见且高度实用的机器视觉类型是检测视野内所有物体的距离。 有两种常见的方法可以进行多物体测距。第一种是雷达,但在室内环境下,首先需要考虑的是持续暴露在高频信号下对操作人员造成的危害。室外环境下,雷达信号会被物体反射并向四周发散,但不会造成任何危害。用于室内时,雷达会反复反射多个物体,从而造成强烈的电磁干扰 (EMI)。长时间暴露会对操作人员的身体健康造成长期影响。 对视野内多个物体测距的第二种常用方法是激光测距,也称为 LiDAR。一束或多束激光束对准待测距物体。将激光束反射回在其发射点的接收器所花费的时间以及光束发生的任何相移与发射激光的时间和相位进行比较。一种算法根据时间和相位差计算到物体的距离,并转换为厘米或英寸。 单激光束检测一个物体的时间和相位差的计算非常简单。但是,更复杂的机器视觉应用将会出现计算视野中许多物体距离的情况。结合这些计算来创建距离的可视化图形并非易事,而且需要大量的开发时间。
可进行距离检测的机器视觉
Intel RealSense 的 82638L515G1PRQ 高分辨率 L515 LiDAR 深度相机就是一种可以快速启动并运行的机器视觉应用的实用解决方案(图 1)。相机直径为 61 mm,深度为 26 mm,包含一个 LiDAR 图像深度单元、红、绿、蓝 (RGB) 相机和一个惯性测量装置 (IMU)。LiDAR 相机可以返回 1024 x 768 或 1920 x 1080 的图像位图,每个像素代表该点到相机的距离。
Intel L515 LiDAR 相机返回其视野中的某个区域的位图图像。但是,LiDAR 相机不是返回该区域的典型摄影图像,而是返回图像,其中每个像素的 RGB 值表示每个像素距 Intel L515 相机的距离。该相机的分辨率为 0.25 - 9 米。该相机还包含一个标准的 2 兆像素 (MP) (RGB) 图像相机,这在开发过程中非常有用。建议将该相机用于室内照明,因为其并非设计用于在阳光充足的地方。 图 2 所示为 Intel L515。相机图像的中心为前景中的植物,并分为两部分。左侧以自然色显示植物和背景的常规 RGB 相机图像。右侧是每个物体到相机距离的直观表示。前景中的植物显示为蓝色阴影,而背景中的墙壁显示为亮橙色。在右侧,墙壁距离相机中心更远,因此图像变成更深的红色阴影。
使用此信息,软件可以处理图像数据以确定物体和相机之间的距离。 凭借其紧凑的外形和高集成度,Intel L515 LiDAR 相机适用于必须在新系统或现有系统中快速实施机器视觉深度检测的室内工业自动化应用。对于移动系统,Intel L515 包含可感测 ±4 g 加速度的 IMU 和可感应高达 ±1000˚/s 旋转的陀螺仪。这适用于工业自动化工厂中使用的大多数室内车辆或机器人。当为 IMU 固件编码时必须小心,因为撞到障碍物的车辆或机器人可能瞬间看到超过 4 gs 的速度,必须考虑这种异常情况。
完整系统中的机器视觉
Intel L515 可通过高速 USB 3.1 接口连接 PC 或单板计算机 (SBC)。相机外壳上已配备 USBType-C 连接器,因此可以使用带有 Type C 连接器的标准电缆来简化集成工作。由于机器视觉图像处理可能会占用大量 CPU,因此建议您使用功能强大的电脑,以便在必要时实时处理图像数据集。UDOO KTMX-UDOOBL-V8G.00 Bolt V8 是基于四核处理器的高性能 SBC,这种处理器运行速度为 2.0 GHz (GHz)(提升 3.6 GHz),支持高达 32 GB 的 DRAM 。对于程序存储器,可以使用 M.2 固态硬盘 (SSD),并且还支持 SATA-3 标准硬盘驱动器接口。
UDOO Bolt V8 提供两个 HDMI 1.4 视频接口,用于连接显示器。需要联网,可以使用板载 RJ-45 连接器通过有线千兆位以太网连接工厂网络。支持 Wi-Fi 和蓝牙。通过 3.5 英寸标准插头支持立体声音频。这款单板机可运行任何 64 位 x86 兼容操作系统,包括 Microsoft Windows 和任何 64 位 Linux 发行版。这款功能强大的单板机需要 19 V、65 W 电源来支持其 2 GHz 的性能。 至于机器视觉数据算法,UDOO Bolt V8 已具有足够的处理能力。该设备可通过高速 USB 3.1 Type C 接口从 Intel RealSense L515 接收数据,并在必要时在连接任一 HDMI 接口的显示器上显示图像。连接到任一音频输出插孔的扬声器均可发出警示或警告音。
总结
具有深度感测功能的机器视觉是快速扩展的领域,如果从头构建,可能需要复杂的代码和硬件。将机器视觉系统与可在预先编程的固件中执行深度计算的交钥匙型解决方案集成在一起,可以节省时间和金钱,从而在工业自动化环境中快速可靠地使用高性能机器视觉系统。
责任编辑:xj
原文标题:干货 | 英特尔Realsense™ LiDAR技术如何提高工厂安全性和生产率?
文章出处:【微信公众号:机器人创新生态】欢迎添加关注!文章转载请注明出处。
-
英特尔
+关注
关注
61文章
10326浏览量
181137 -
机器视觉
+关注
关注
166文章
4831浏览量
126546 -
LIDAR
+关注
关注
11文章
368浏览量
31606
原文标题:干货 | 英特尔Realsense™ LiDAR技术如何提高工厂安全性和生产率?
文章出处:【微信号:robotplaces,微信公众号:机器人创新生态】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
蓝牙信道探测(Bluetooth® Channel Sounding)
激光雷达LiDAR技术的工作原理和应用场景

一文读懂:可燃气体探测器的有效检测距离是多少?
蓝牙6.0信道探测:厘米级定位、数字钥匙与模块方案揭秘
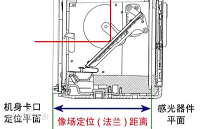
法兰距离:相机镜头系统的关键参数
数字车钥匙标准ICCOA 4.0版本引入蓝牙信道探测技术
银基科技蓝牙信道探测技术开启无感数字钥匙新时代
制冷型红外探测器如何选择?中波与长波的全面对比

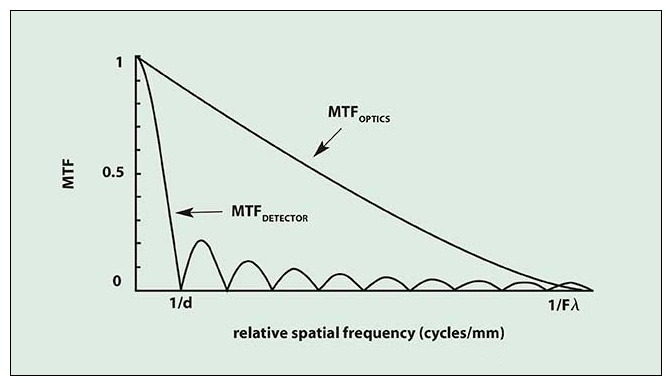
相机分辨率:融合探测器与光学性能
机器视觉系统中工业相机的常用术语解读

浅谈芯科科技基于蓝牙信道探测的数字钥匙解决方案
激光雷达在自动驾驶汽车的应用

蓝牙信道探测,简单可靠的无线测距方案
蓝牙通道探测技术的工作原理




评论