 基于ARM微控制器和L298步进电机控制器实现探针驱动电路的设计
基于ARM微控制器和L298步进电机控制器实现探针驱动电路的设计
引言
扫描电化学显微镜(SECM)是80年代发展起来的一种电化学现场检测新技术。该技术驱动非常小的电极(探针)在靠近样品处进行扫描,样品可以是金属、半导体、高分子、生物基底等材料。SECM具有化学灵敏性,可测量微区内物质氧化或还原所产生的电化学电流,从而获得对应的微区电化学和相关信息。它主要由电化学部分(电解池、探头、基底、各种电极和双恒电位仪器),用来精确地控制、操作探头和基底位置的位移驱动器,以及用来控制操作、获取和分析数据的计算机(包括接口)等三部分组成,SECM系统原理如图1所示。
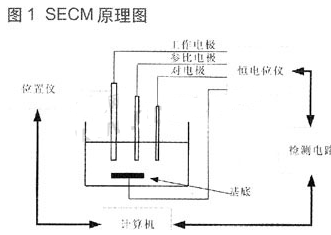
位移驱动部分是通过超精密定位技术(UMDE)实现对探针的三维空间微位移的精准控制,操纵探头和基底间保持相对稳定,以便获得样品表面信息。它既是SECM控制系统的基本组成部分,也是SECM实现纳米级分辨率的关键技术之一。为了获取样品尽可能完整的信息,要求驱动位移空间相对样品有较大的量程,可达到厘米级别。同时高分辨率要求必须是超精密定位,分辨率可达到亚微米。因此,SECM的驱动部分采用宏微两级位移控制系统。宏定位采用步进电机,微定位采用压电陶瓷。一个好的驱动控制电路是影响SECM位移精度的关键因素,因此本文着重于设计二级位移系统的控制电路。
参进电机宏定位
步进电机作为角位移的执行机构,当步进驱动器接收到一个脉冲信号时,就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。由于可以通过控制离散的脉冲个数来控制角位移量,从而可以满足SECM准确宏定位的目的。步进电动机的控制占用火量的CPU工作时间,会影响了系统的整体性能。本驱动系统设计采用一种基于ARM微控制器的由L298构成的控制和驱动电路,既不占用CPU大量的时间,又能获得良好的控制和驱动效果。
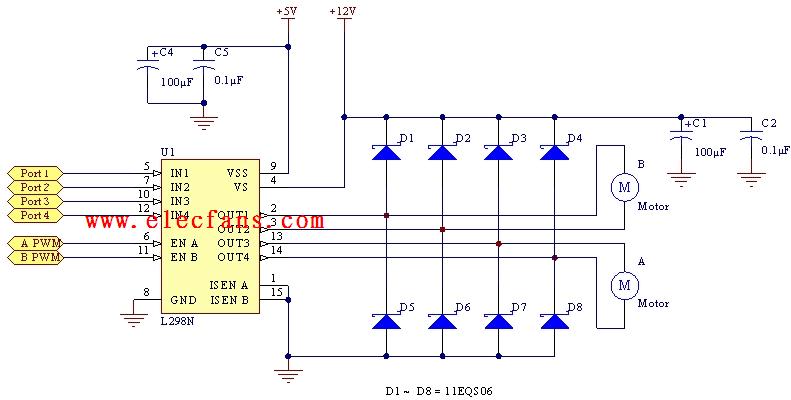
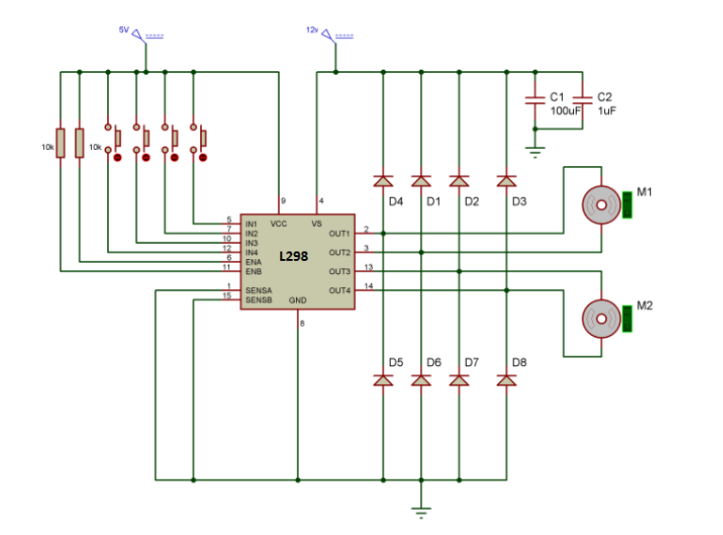
SGS公司的L298步进电机控制器的片内PWM斩波电路产生开关式控制绕组电流。该器件的一个显著特点是仅需时钟、方向和模式输入信号。步进电机所需相位由电路内部产生,它产生两相双极性驱动信号和电机电流设定。L298内含两个高电压人电流双桥式驱动器,可驱动电压最高46V、每相2.5A的步进电机,组成的两相双极性的步进电机驱动电路,原理如图2所示。由ARM芯片LPC2138输出PWM信号,经过光电隔离器TLP521-2,再与两个IO口组合送入双输入四与门74LS08实现正反转控制。SECM需要三维驱动,此处只画出一路电路。

压电陶瓷微定位 压电陶瓷驱动电源
压电陶瓷是利用电介质在电场中的压电效应,直接将电能转换成机械能,产生微位移的换能元件。因其高刚度、高频响、推力大和高分辨率等优点,广泛应用十航空航天、精密测量、生物工程、机器人等领域。驱动电源对压电陶瓷和机构的微位移影响很大,故性能良好的驱动电源是实现高精度位移的关键。压电陶瓷对驱动电源要求如下:一定范围内连续可调、输出稳定性好、纹波小、分辨率高。
压电陶瓷驱动电源从原理讲可以分为电压控制型和电荷控制型。这里采用电压控制型,由直流放大器芯片对控制电压信号进行线性放大和功率放大,输出0~150V连续可调的直流电压。它决定着电源输出电压的分辨率和稳定性,是整个电源的关键。
高压运放电路
Apex公司的PA69是一个高压、高速功率运算放大器,可采用单/双电源供电;转换速率非常高,可达到200 V/μS;可以提供高达50mA的恒定输出电流,其峰值输山电流达100mA。PA69待机电流很小,一般不到1mA;具有限流保护功能。
选用的压电陶瓷等效电容为0.1μF,需要0~150V的连续可调输出电压,频率0~1kHz(正弦波),则所需转换速率为:
S.R=2πfV(1×l0-6)=2π×1000×150×(1×10-6)=0.94V/μS
所需最大负载电流为:
I=S.R×CL=0.94V/μS×0.1μF=94mA
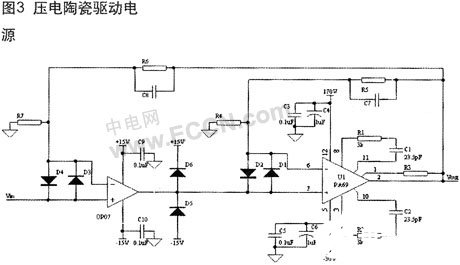
所选定的PA69运算放大器符合要求,电路如图3所示。其中引脚6、7为输入,2为输出,3和10以及8和11外接补偿电阻和电容,构成相位补偿网络,实现相位补偿。1和2引脚之间接限流电阻,形成对运放的限流保护功能。
失调电压补偿
在室温(25℃)及标准电源电压下,输入电压为零时,为使集成运放的输出电压为零,在输入端加入失调电压VIO。实际上指输入电压V1=0时,输出电压VO折合到输入端的电压是负值,即VIO= - (VO|VI=0)/AVO。
PA69的最大失调电压为3mV,对分辨率要求为10mV以下的压电陶瓷驱动电源,PA69的输入特性不能满足设计要求,需要对电路的前级输入进行优化。为了减小输入失调电压,在该电源的线型放大部分,采用由OP07和PA69组成复合放大电路。MAXIM公司的OP07具有高精度输入失调电压,最大为75μV。由PA69和OP07组成一个新的具有负反馈的放大器,其输入失调电压为75μV×30=1.5mV《10mV,满足输入特性的要求。
放大器的输入电压为0~5V,输出电压为0~150V,故根据特性曲线选定PA69的闭环放大倍数为30。整体电路如图3所示。
责任编辑:gt
-
微控制器
+关注
关注
48文章
7542浏览量
151316 -
驱动器
+关注
关注
52文章
8226浏览量
146253 -
ARM
+关注
关注
134文章
9084浏览量
367387
发布评论请先 登录
相关推荐
基于STM32微控制器和STSPIN L6474步进电机驱动器设计
L297和L298芯片混合式步进电机控制器的keil程序和电路图免费下载

使用Arduino和L298电机驱动器制作直流电机速度控制器







 工商网监
工商网监
评论