 LabVIEW:适合点云平滑的双边滤波器
LabVIEW:适合点云平滑的双边滤波器

摘要:
我们通过扫描仪获得物体的点云,经常掺杂着噪音。产生噪音的原因可能有很多多种,例如,切向的采集方向、环境光干扰、物体材质的反射等因素导致。因此设置一种滤波方法,可以去除噪音有保留物体原有物体的尖锐特征信息至关重要。本文设计了一种适合点云平滑的双边滤波器,既可以高效的去除噪音,又可以保留物体尖锐特性。
背景介绍:
对三维采集设备获取的点云进行去噪平滑处理是当今几何处理研究中最重要的任务之一。实际上获得点云的方法有很多种,基于照相技术的结构光方法、基于激光的三角测距方法,点云采集设备越来越流行,并且出现了价格便宜精度低的设备,所有这些技术演变都需要我们设计一种高效的去噪滤波工具从噪杂的点云集中恢复出物体本来的点云集。
数据输入:
输入数据是无序的三维点云坐标,不含法向,以及该片点点云的参考法向(不管是激光扫描还是基于深度相机的设备采集的点云都已知硬件在世界做坐标系的位置,点云的整体法向是朝向硬件的),输入法向的目的是为计算后的法向进行定向,当然我们采用的双边滤波方法是适应具有二义性的法向的,但为了后续处理还是需要对法向进行定向。
点云:[3*n]
参考法向:[3]
平滑参数:法向权重、距离权重及迭代次数
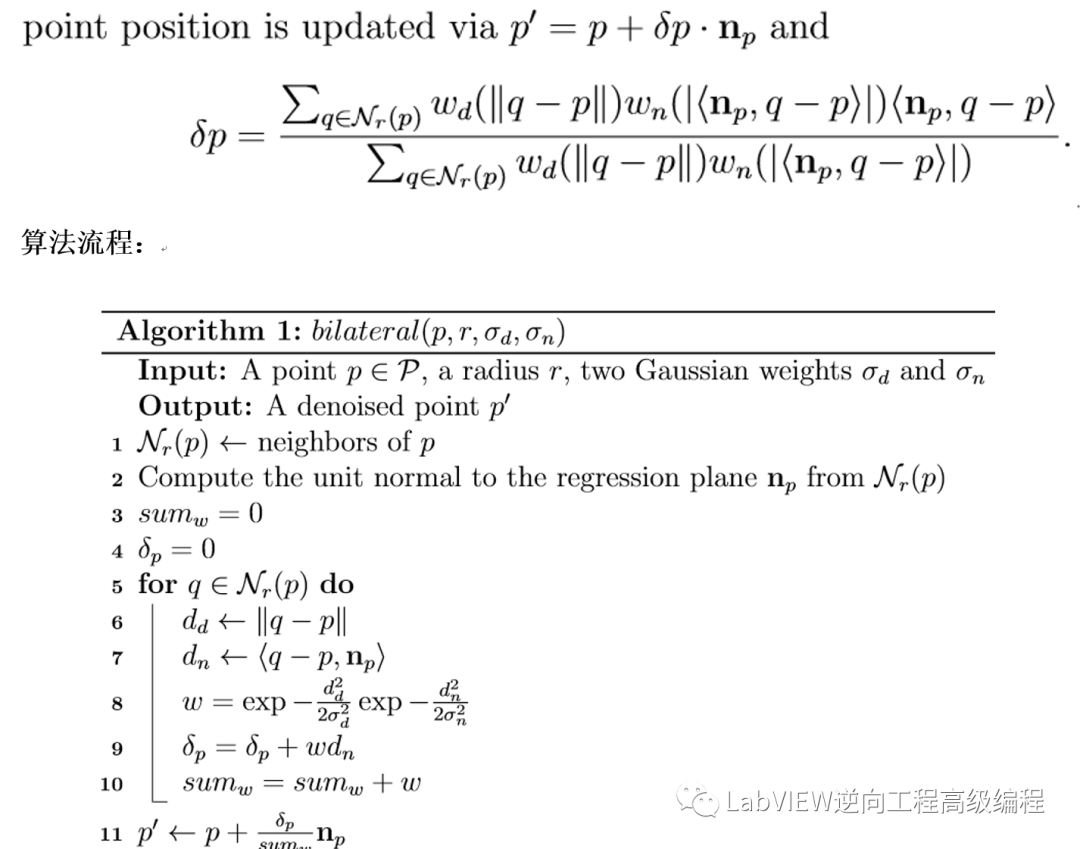
平滑算法:
LabVIEW验证:
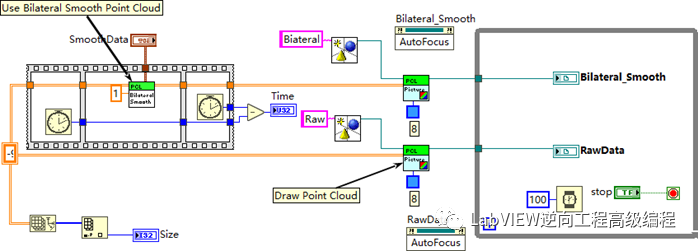
参数调整:
通过调整Normal_Weight(法向影响因子)与M_weight(距离影响因子)及迭代次数来调整平滑效果。该方法主要是参考法向及距离的影响,尖锐的细节通过调整参数同样可以保留。
该方法已经加入到3D_Vision_Advanced_Toolkit For LabVIEW中!
参考文献:
https://www.researchgate.net/publication/320703396_The_Bilateral_Filter_for_Point_Clouds
责任编辑:xj
原文标题:LabVIEW_基于双边滤波的点云平滑
文章出处:【微信公众号:LabVIEW逆向工程高级编程】欢迎添加关注!文章转载请注明出处。
-
LabVIEW
+关注
关注
2022文章
3689浏览量
348869 -
双边滤波
+关注
关注
0文章
4浏览量
2167 -
点云
+关注
关注
0文章
59浏览量
4098
原文标题:LabVIEW_基于双边滤波的点云平滑
文章出处:【微信号:gh_63f7cd07072a,微信公众号:LabVIEW逆向工程高级编程】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
电源滤波器:不要错过!这款滤波器让系统“静”下来

输入滤波器 vs 输出滤波器:核心差异解析


屏蔽电源滤波器的分类

交流单相滤波器与三相滤波器的核心区别解析
通信设备滤波器选型指南:Murata多层LC滤波器详解
如何选择适合的电源滤波器?额定电流、插入损耗等参数全解析
基于Matlab与FPGA的双边滤波算法实现

有源滤波器与无源滤波器的区别
言必信_如何选择适合跑步机的电源滤波器

GNSS 低噪声放大器前端模块,集成前滤波器和后滤波器 skyworksinc

滤波器厂家分享:开关插座式滤波器线材连接和弹片安装小技巧
测量电子电路设计(滤波器篇)
Sky5® 低电流 GNSS LNA 前端模块,集成前置滤波器和后置滤波器 skyworksinc



评论