 如何控制机器视觉检测系统的误差
如何控制机器视觉检测系统的误差
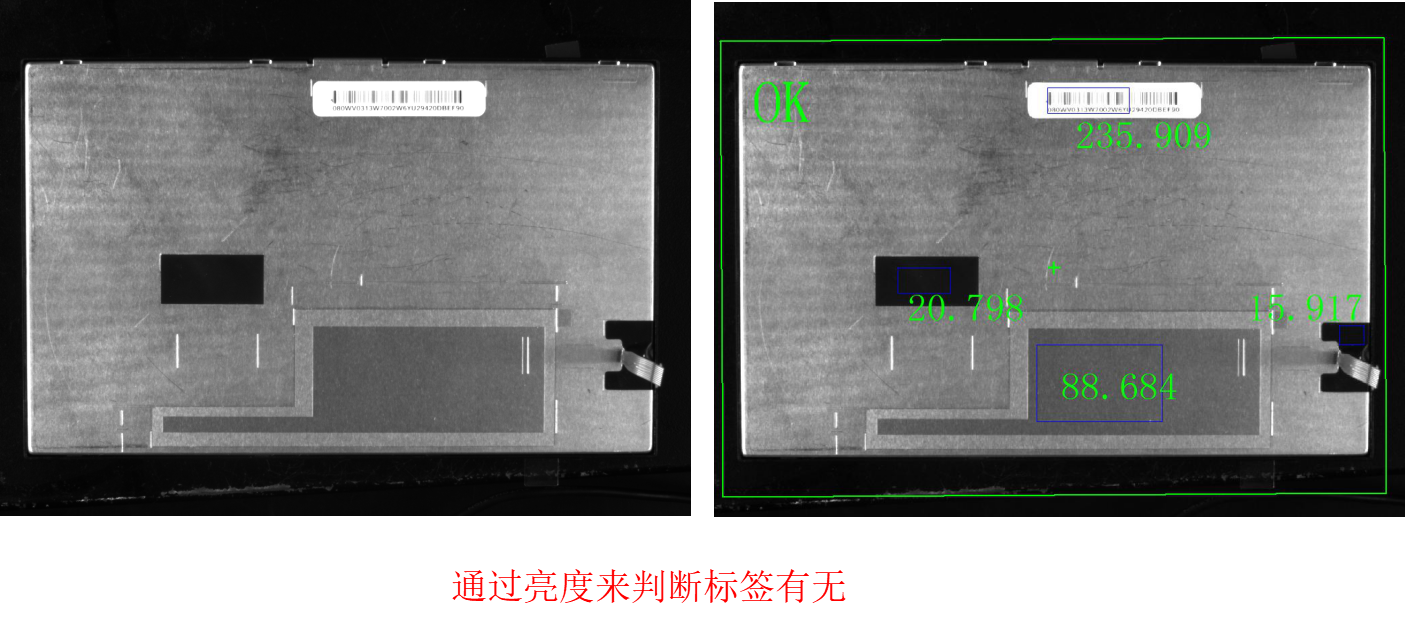
在机器视觉检测系统中,检测系统的误差通常包括:机械误差、标定误差和分析误差三部分。其中,机械误差是由系统机电执行部分硬件引入的,例如在一幅图像内可能无法完成对工件的测量,工件需要移动位置来采集多幅图像,这时,机电运动系统的运动精度将会对测量的精度产生很大的影响。
这一部分误差可以通过运动精度的大小计算出来,在多步运动过程中会产生累积,所以应尽量减少测量过程中的运动步数。在建立视觉检测系统的过程中,要在实际检测条件的基础上合理分配系统的误差。主要方法有:
1、简化机电系统运动步骤,提高机电系统的硬件精度;
3、提高工业相机的图像质量,尽量采用较小的物像比。
责任编辑:xj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器视觉
+关注
关注
162文章
4376浏览量
120389 -
机器视觉系统
+关注
关注
1文章
83浏览量
18870
发布评论请先 登录
相关推荐
适用于机器视觉应用的智能机器视觉控制平台
工控机在机器视觉系统设计中是不可或缺的核心组件,在机器视觉中发挥着至关重要的作用,其强大的计算能力、高度的稳定性和可靠性、实时性以及图像处理和识别能力,为

机器视觉检测应用场景:缺陷检测、尺寸测量、引导定位、运动控制
就来介绍一下 机器视觉检测 的应用场景:缺陷检测、尺寸测量、引导定位、运动控制。 1、缺陷检测
视觉检测是什么意思?机器视觉检测的适用行业及场景有哪些?
在快速迭代的工业世界中,机器视觉检测以其精准、高效的力量,已成为众多产业不可或缺的技术支持。本文将深入探讨机器视觉
机器视觉检测系统的关键技术和应用场景
随着人工智能技术的飞速发展,机器视觉作为其中的重要组成部分,正逐渐渗透到工业制造、自动驾驶、医疗诊断、农业自动化等多个领域。基于深度学习的机器视觉检
机器视觉系统与运动控制系统的区别
在工业自动化和智能制造的浪潮中,机器视觉系统和运动控制系统作为两大关键技术,各自扮演着不可或缺的角色。它们虽然都是为了实现更高效、更精确的自动化操作,但在技术原理、功能定位、应用领域等方面却存在显著的区别。本文将从多个维度出
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服
发表于 05-29 16:17
机器视觉如何检测橡胶圈外观尺寸检测?
外观检测 机器视觉系统可以检测橡胶圈表面的缺陷,裂纹、气泡、凹陷等。通过图像处理算法,系统能够准确识别并标记出这些缺陷。
焊接视觉检测系统的原理和应用
焊接是工业生产中常见的一种连接工艺,而焊接质量的保障对于产品的性能和安全至关重要。为了提高焊接过程的自动化水平和质量控制,焊接视觉检测技术应运而生。本文将深入探讨焊接视觉





 工商网监
工商网监
评论