 思岚科技:让机器人会看会走
思岚科技:让机器人会看会走
随着人工智能和物联网技术的不断发展,专业服务型机器人的应用领域也在不断拓展,据相关机构的数据显示,初步估算2020年专业型服务机器人的销量将上升至2670万台。机器人“会看”,“会走”的基本属性,让自主定位的市场成为了一个巨大的蛋糕。
然而让这些机器人实现自主行走,以前离不开预先铺设的导线和导轨,现在离不开自主定位和导航的技术。上海思岚科技有限公司(简称:思岚科技)是一家专门提供机器人智能移动解决方案的公司,技术和产品帮助了业内众多机器人生产厂家实现了“底层智能移动”的精准服务。
要让机器人实现自主定位导航,首要任务就是要解决地图构建及路径规划,本质上就是做好传感器+算法。
传感器:可帮助机器人实现高精度的地图构建;
SLAM算法:可帮助机器人拥有避障、导航的能力;
帮助机器人突破第一条防线,就是让机器人拥有“会看”的能力。这是思岚科技360激光扫描测距雷达(RPLIDAR)设计的初衷。思岚科技CEO陈士凯在接受采访时表示:当初决定打破行业垄断及技术瓶颈,采用图像的方法进行激光雷达传感器的设计。通过图像传感器捕捉激光到达目标物体后的画面,根据目标物体远近不同导致激光在图像传感器上的成像位置变化求得距离。
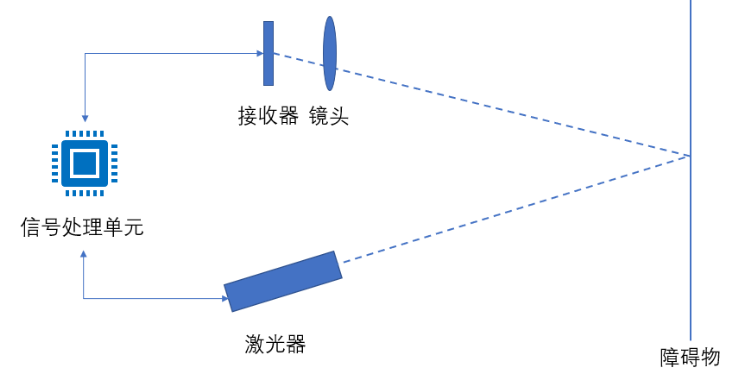
雷达雷达测距原理
激光雷达相较其他传感器拥有指向性强,能够十分精确的刻画距离的特点。
相机成像特点
有了激光雷达和算法的助力,还需要多传感器数据的融合,锦上添花。传感器对收集到的信息进行有效处理和融合,能够让机器人更为直观地判断出周围的环境,确保更多可靠的信息被利用,做出更智能,更类人的判断,完成导航。
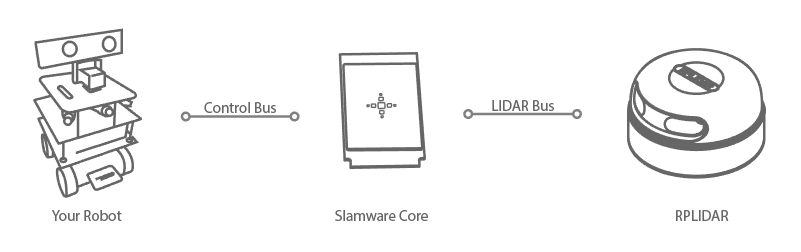
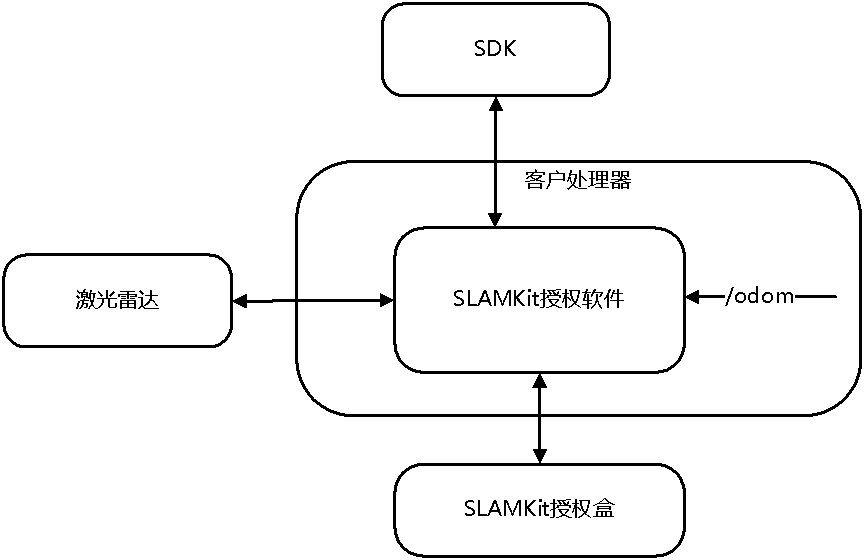
除了让机器人拥有“会看眼睛”的能力,思岚科技还让机器人拥有了“会走小脑”的能力,即模块化自主定位导航系统(SLAMWARE)。有了“小脑”的机器人,可自动搜索前往目标的最优路径,并自动规避障碍物,无需人工干预。
预设路线,自主避障导航
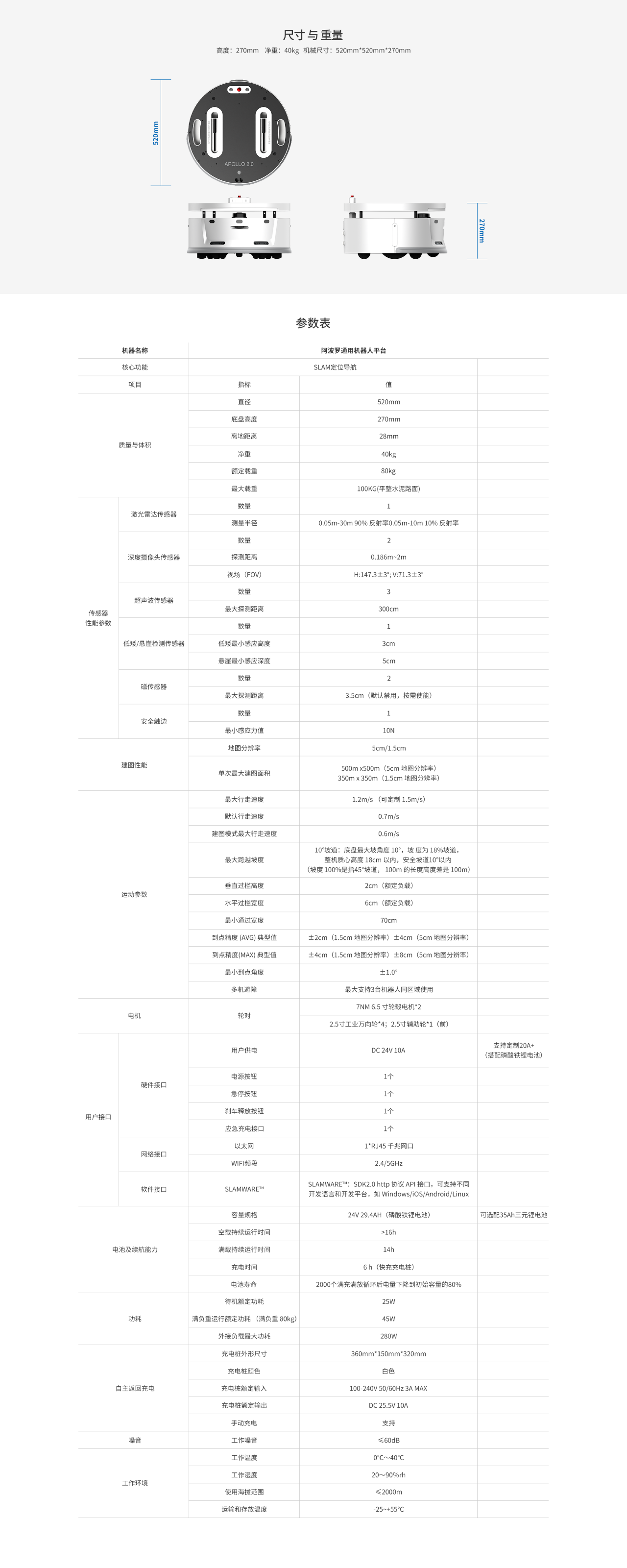
为了帮助服务型机器人企业降低研发成本,思岚科技针对性推出了以ZEUS为代表的机器人底盘。作为一款可扩展的通用型服务机器人开发平台,采用国内领先的SLAM技术,不仅能了解周边环境,还能知道自己在哪,同时采用SharpEdge构图技术,构建厘米级高精度地图,融合了激光雷达、深度摄像头、超声波、防跌落等多种传感器数据,配合导航算法,让规划行走路线的更灵活。
经过七年的发展,对于成本和精度的高度把握与突破,成为了思岚科技的核心竞争力。陈士凯强调:激光雷达只是思岚业务的一部分,从最初提供激光雷达作为进入行业的切入点,到目前提供整套解决方案为线,思岚科技的“点、线、面”发展路径已经慢慢初显。对于面的扩展上,陈士凯则表示:思岚科技的经验未来对于同样重视激光雷达的自动驾驶领域有许多的可借鉴之处,目前已经在轻量级的无人驾驶行业迈进。
“未来是一个泛无人驾驶的时代,无人驾驶与机器人会更加紧密的融合,服务型机器人也会实现进一步的普及和落地。” 陈士凯相信思岚科技会在这一毋庸置疑的趋势中,继续沿着现有的技术和产品方向发展,深耕自主定位导航技术领域,服务更多数字化产业的转型。
责任编辑:xj
-
机器人
+关注
关注
211文章
28380浏览量
206919 -
人工智能
+关注
关注
1791文章
47183浏览量
238266 -
自主移动机器人
+关注
关注
2文章
42浏览量
11577
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
思岚科技荣获双年度移动机器人优质供应链奖
思岚科技SLAMKit定位与建图解决方案介绍
思岚科技全场景机器人底盘Apollo2.0的特性
思岚科技推出新一代圆形通用机器人底盘Apollo2.0
开源项目!用ESP32做一个可爱的无用机器人
思岚科技S2L激光雷达在ROSLander机器人上的作用





 工商网监
工商网监
评论